本記事1年以上前で、現在(2021年6月)では、MovingBaseモードの設定ファイルのバージョンが上がっていて書き込み方も違ってますので、
※MovingBaseポータル記事
※下記最新の記事をご覧ください。SimpleRTK2B liteへの書き込みでトラブルが多いので注意です。460800bpsで使う場合はまりやすいです。
ここ1カ月の懸案であるMovingBaseモードを再度トライしてます。
●追伸
本日(1月23日)にArduSimpleサポートからアドバイスがあって、MovingBase動作開始できました。
ArduSimpleサポート様と相談した結果
現在の同社のmaster設定ファイル群は、M8/8モードでしか正確に書き込めないそうです。
ですので、Tool>Reciver Configuraion では、M8/8モードにしてから
下にあるstore configuration into BBR/Flash に必ずチェックをいれてから
Trasfer File ->GNSS ボタンを押さないと正確に書き込めません。
結局、master設定ファイルがきちんと書き込めなくて動作してなかったというのが原因でした。実際に2つのアンテナ間の寸法ばらつきは、7mm以内ですので1cm以内で2点間距離測定できてますので、Headingさせて角度差がどのくらいでるか楽しみです。さらにMBへNTRIPデータもXbee通信で流して、通常のRTKで絶対位置をだしながら、ROVERの旋回角も精度よくでますので、スキーターンはこれでもかというほど精度がでると思います。しかし、ROVERのデータはすべてUBX-NAV-RELPOSNEDデータでバイナリなので、その場で確認することができませんので、明日以降、MBモードでのHEADINGデータの処理方法を開発していきます。
お楽しみにしてください。
●MovingBaseモードを何回も試したが動かない経緯
ArduSimple社のmaseter設定ファイルにMovingBaseの設定ファイルがBase用とRover用があります。問い合わせしたら,
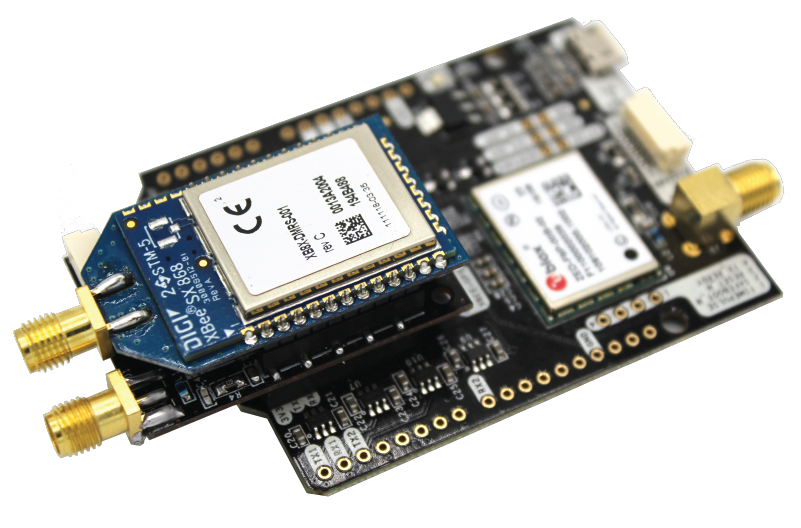
MovingBaseを、SimpleRTK2BliteにしてSimpleRTK2BがRoverにするそうです。イメージとして基準局が小さなSimpleRTK2Bliteになるのが違和感ですが
SimpleRTK2BのXbeeソケット(UART2)に差し込むので、liteがMBになるほうが都合がいいのだと思います。
simpleRTK2B-master ZIPから設定ファイルを選択してやりましたが

simleRTK2B:srtk2b + heading_rover_F9P_FW_HPG112.txt
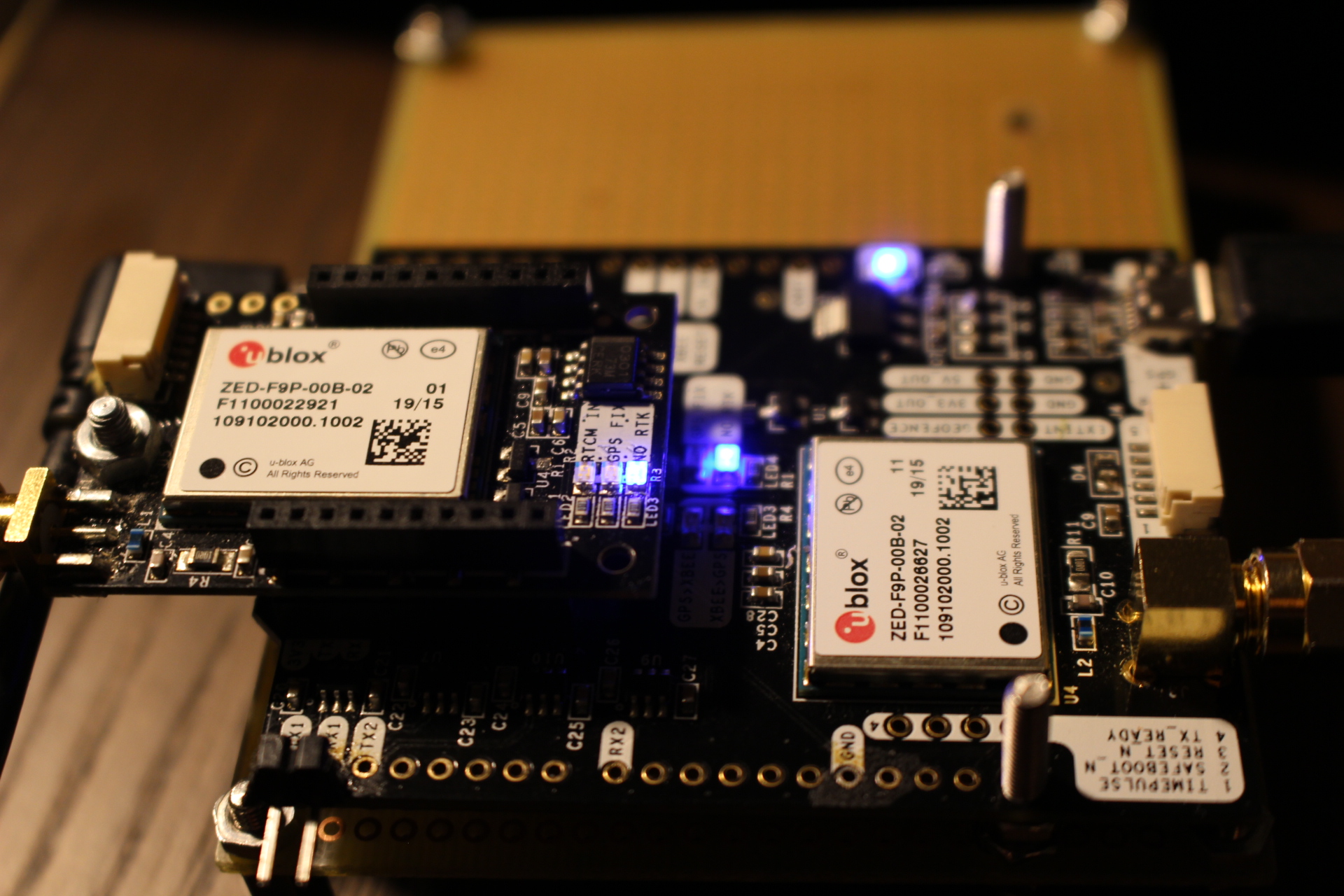
これに沿って、設定ファイルを書き込んで、いざ動作させてもSimpleRTK2BのNO RTKが点灯しっぱなしで、RTK計算できてません。
上に載っているliteからはデータは受信できているみたいで、Xbee->GPSのLEDは点滅してます。
①MBの情報収集
A:UBLOXの仕様書
1:ZED-F9P IntegrationManual MBの基本があります。
https://www.u-blox.com/ja/docs/UBX-18010802
ここの14ページ 3.1.5 RTK configuration でMBの基本書いてあります
|
3.1.5RTK configuration
RTK technology introduces the concept of a baseand a rover. In such a setup, the base sends
corrections (complying with the RTCM 3.3 protocol) to the rover via a communication link. This
enables the rover to compute its position relative to the base with high accuracy.
While in the standard RTK mode, the base remains static in a known position, in the moving base
(MB) RTK mode, both base and rover receivers can move. The latter is ideal for applications where
the relative position offset between two moving vehicles is required such as, for example, the follow-
me feature on a UAV.
In the MB RTK context, the base and rover receivers are referred to as MB base and MB roverrespectively.
When operating as a rover, the ZED-F9P can receive RTCM 3.3 corrections from another ZED-F9P
operating as a base, or via NTRIP from a virtual reference service provider operating a network
of base receivers. In this mode, the receiver coordinates will be expressed in the datum used by
the RTCM correction provider. For more information on this topic please refer to the
RTCM ITRFGeodetic models section in the Appendix.
After describing the RTCM protocol and corresponding supported message types, this section
describes how to configure theZED-F9P high precision receiveras a base or rover receiver.
This includes both the static base use case and the moving base use case. See the ZED-F9P Moving Base application note [4] for more information on designing in and using moving base.
|
2:Moving base application Manualに設定方法がありますが、
これは、ubloxのC099F9Pボード用です。
https://www.u-blox.com/sites/default/files/ZED-F9P-MovingBase_AppNote_%28UBX-19009093%29.pdf
B:ArduSimple社でのSimpleRTK2BとSimpleRTK2Bliteを使ったMBの解説
ubloxのC099よりシンプルで扱い易く安い基板を提供してくれてますが
低マージンのため仕様書類はありません。WEBページと設定ファイルだけです。SimpleRTKのMBは、
simpleRTK2B + heading hookup guide
で説明されてます。
さらに、この構成での設定ファイルの解説もあります。
https://www.ardusimple.com/configuration-files/
これに沿って
simpleRTK2Blite:srtk2b + heading_lite_movingbase_FW_HPG112.txt
simleRTK2B:srtk2b + heading_rover_F9P_FW_HPG112.txt
がArdusimple社の推奨のMB設定です。
他にもたくさんありました
https://www.youtube.com/results?search_query=ublox+moving+base
MBモードは、自動車などで、前の車を追尾する用途から始まった感じがします。2個の独立した測位では時間同期がとれないということが含まれているのだと思います。
●スキーモニター用途でMBは必要なのか
スキーの横滑り測定をF9P2ch独立して計測してみて分かったのですが、2個のアンテナ間の距離を固定してあるのにも拘わらず、座標から距離を計算してみると±100%くらいばらつきます。特に高速移動時に大きなばらつきが発生します。
この現象は、F9PのRTK計算のタイミングの違いがあるのではないかと推定してます。200msecサンプリングしているのですが、その間の計算結果は、±200msec区間内のどこかの時点での位置を表しているので、2個の独立したF9Pでは、±200msec程度は同期位置ずれが発生するのではないかと考えてます。しかし、時間同期しないで、最終結果として2つの軌跡の精度は、数cmで収まっていると考えてます。
時間同期させるためにMovingBaseモードがあるのではと理解してます。
逆に時間同期を重視しないなら、2個独立して計測して、軌跡の違いだけで結果として有用ならそれでもいいのではないかと考えてます。
MovingBaseモードの課題として、計算時間が通常のRTKよりかかるので
通信速度の推奨460800bpsとなってますので、相当計算時間に余裕がないみたいです。スキーでは、200msecサンプリングでも不足気味なので
100msecサンプリングもトライしたいくらいなのでMBは足枷になると思います。2個の独立した軌跡だけでも精度がよければ、使える用途だと思います。
MBについては、Ardusimple Forum Q&Aに問い合わせをいれてあるので回答をまって、進めていきます。
IMUを使った磁気方位計測のほうも、スキーの振動対策と傾斜処理でうまくできないか再度検討してみます。