STA25システムは、2024年夏からCPU構成を2CPUにするつもりで準備していたのですが、12月になって、実装を始めるとと
これ以上基板が増えると防水ケースが大きくなりすぎて、ただでさえ大きくて重いのでテストライドでも支障がでると思って
2025年正月に思い切って1CPUで処理することにしました。慌ててプログラムを作成したのですが、どうもデバッグが不完全で
3個のF9Pからのデータ受信のうちテールのRoverの受信がデータ落ちが30-50%も発生する場合があることがわかったのが
3月にはいってからで、あまりにもやることが多すぎて、Teensy4.1でもデータ落とさざるを得ないので、仕事を減らしてやる対策を
とってきました。
●CPU負荷軽減対策
対策1:Baseからのデータ量1Kbyte/epochを172byte/epochに減らしました。NAV-SATを無くしたので、衛星受信状態のログができなく
なりましたが、衛星受信状態が悪かろうか好かろうがあまり測定には反映されないので、無くても良い仕様でした。
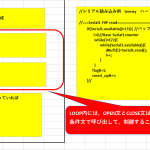
対策2:Teensy4.1のハードウェアシリアルは、データ量が多くて時間を食うシリアルデバイスに対しては、非常に有効な機能ですが、
バッファを大きくして更に複数個使うとSDライブラリーと干渉して、SD OPENエラーでSDログができなくなります。
そこで、3個もハードウェアシリアルを使わないで、2個にして、最後の3個めは、普通のSDライブラリにしました。
64バイトで、SD書き込みしている間は、他のデバイス制御が止まるので、コンフリクトが発生することが3月にはいってわかりました。現時点では、F9P2個分の測定だけで、片肺稼働してます。
=>4月からは、2CPUにして、ひずみゲージアンプとIMU2個とBASEボードを1個ケース、Rover2個を1CPUで面倒を見る
構成に変更します。これなら、無理なく出来るはずなので、データ落ちなどなくなると思います。
システムに余裕を持たせておかないと来年以降に採用するX20Pチップの25Hzログができなくなるので、25Hzログ出来る余裕を
もたせたシステムにしておきます。
対策3:私のおっとりした滑りでは、速度も振動もないのでシステム実装をいじめてなかったのですが。
今回、横田様というプロテストライダー様に乗っていただいて、システム実装が脆弱であることが露見しました。
現象1:重い雪20cmをかき分けて滑る場合、アンテナは雪に埋もれると特にテールのアンテナが埋もれる。
=>雪で重れる滑走だとテールは完全に全滅となる。トップも調子がわるい、センターは高い位置にあるので生きている
現象2:激しい振動で、BNO085がドリフトしたり周期が乱れてしまう。FUSIONアルゴリズムは、急な運動が向かないのは
BNO055で証明されていたのですが、やはりBNO085でも高速度での高振動では、狂ってしまいました。
RVCモードをやめてFUSIONとノーマルモードにして、I2Cで受信する方法に変更してみます、
現象3:ねじ類が全て緩んだ、1回滑走で、アンテナのネジとメインボックスのネジが緩んでいた、メインボックスにIMU
がはいっていたので、余計な振動を拾ってFUSIONが狂ったのかもしれない、センターアンテナ部のケースに引っ越します。
対策4:ログ操作、スマホでオンオフやるのがBlueTermでテキスト入力がやりにくいので、何らかのジェスチャーでスタートして
スタートの確認がすぐわかる方法を考えます。IMUの動作でジェスチャーを検出するアイデアだします。
●以後
次回が4月末に横田様にテストライド2回目をやっていただくので、急いで上記対策をおこないます。