干渉補正でT字配置のFZが悪すぎたので、FZだけRoverbalZゲージを底に取り付ける改造をしました。
●T字配置の悪さ
温度ドリフトがでます。

ただでさえひずみ量が小さいのにひずみ分よりはるかに大きなドリフトが発生したので、T字配置はあきらめて、FzをRoverbal式の両持ち梁に改造してみました。

これを取り付ける作業で、供回りを防止でぐいぐい掴んでねじったり曲げたりしたせいか、X1X2のゲージ出力にドリフトが発生するようになってしまいました。

温度ドリフトかと思って長時間通電して気温が上がっても、止まらないので、
想定原因1:ゲージの貼りつけが剥がれ気味になった?
想定原因2:ゲージ限界まで曲げひずみが入った?
=>通常1500μStrainがひずみゲージの疲労限界ですので
作業でどのくらいの力を加えればゲージは壊れるか計算してみました。10kgのせん断力を端部にかけても256μStrainしか発生しないのでひずみゲージが伸びきって破壊したモードは無かったです。
とすると、もっとひずみが低いところでひずみゲージの接着が破壊されたのではないかと想定します。
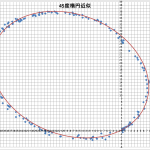
●Roverabal式Fzの効果
ドリフトが小さい短時間のうちで測定をしてみました。
Fz荷重でMxMyのクロストークを見てみました。

有孔ボードにして錘をM6ねじにして、位置精度がぴったりでるように工夫しました。6分力の校正は錘位置の精度がもろ影響するので錘負荷作業の位置精度が非常に重要です。
ですので、板の水平度を水準器で合わせてから、
中心位置に錘をおいてMxMyがゼロ点にいるかどうか合わせてから
左右端に錘を載せて、錘位置が軸上に乗っているか確認をして板がXY軸にあっているか確認します。それから、錘をCenter,X+、X-、Y+,Y-と順に載せて、Fzのクロストークを見てみました。

Fzが各モーメントによって、クロストークを受けていることが判りましたが、66gの錘で1万digit以上ゲインがでるので、Roverbal式にしたほうが6分力全体によい影響になりそうです。
●以後
TS2でアルミパイプに変更してRoverbalで組んでみます。