ようやくi-Tesionゲージの動作検証に入りました。
i-Tensionゲージから測定した力、角度が力のベクトルを表現しているか検証します。

●検証原理
40kgのRoverbal式ロードセルを用意して、i-Tensionで角度をかえて引っ張ります。Roverbal式は、鉛直方向の荷重のみセンシングしますので、角度が鉛直(90度)の時は、i-Tension値とロードセル値は一致しますが、角度傾くにしたがって、SINΘの比率で減っていきます。
ロードセル値=sinΘ * i-Tesion値
となるかどうかを検証します。
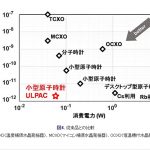
参考資料 IMUの姿勢角度はanalog社の資料が判りやすいです。
https://www.analog.com/media/jp/technical-documentation/application-notes/an-1057_jp.pdf
https://www.invensense.com/products/motion-tracking/6-axis/mpu-6050/
●校正
それぞれを校正します。
特に、ロードセルは、モーメントを加えた場合も校正します。


■Roverbalロードセル40kg#1校正値
モーメントがあるとで0.2%誤差がでますが、このロードセルオーバーロードして壊れっぽいので、ノイズが大きくノイズだけで±16gfもでてますので、測定結果を加味して扱います。

■i-Tesionの校正
鉛直吊り下げでの直線性はぴったりでてます。

鉛直荷重のままi-Tensionを傾けて角度成分を検証しました。

傾けて同じ錘をぶらさげているので、SINΘ成分でi-Tension値がでてくるので
比率はSINΘと一致しないといけないので誤差を検証します。
i-Tension値=SINΘ* 錘荷重値

●校正結果
①Roverbal40kgロードセル
モーメントで0.2%クロストークがあります。
ノイズで±16gf誤差がでます。
②i-Tension
直線性はでてます。
傾けて横方向力を加えた場合最大0.5%の誤差が発生してます。
ベクトル力の精度として0.5%前後が発生することを前提とします。
角度からベクトル力を計算するにあたって特別な補正値は不要です。
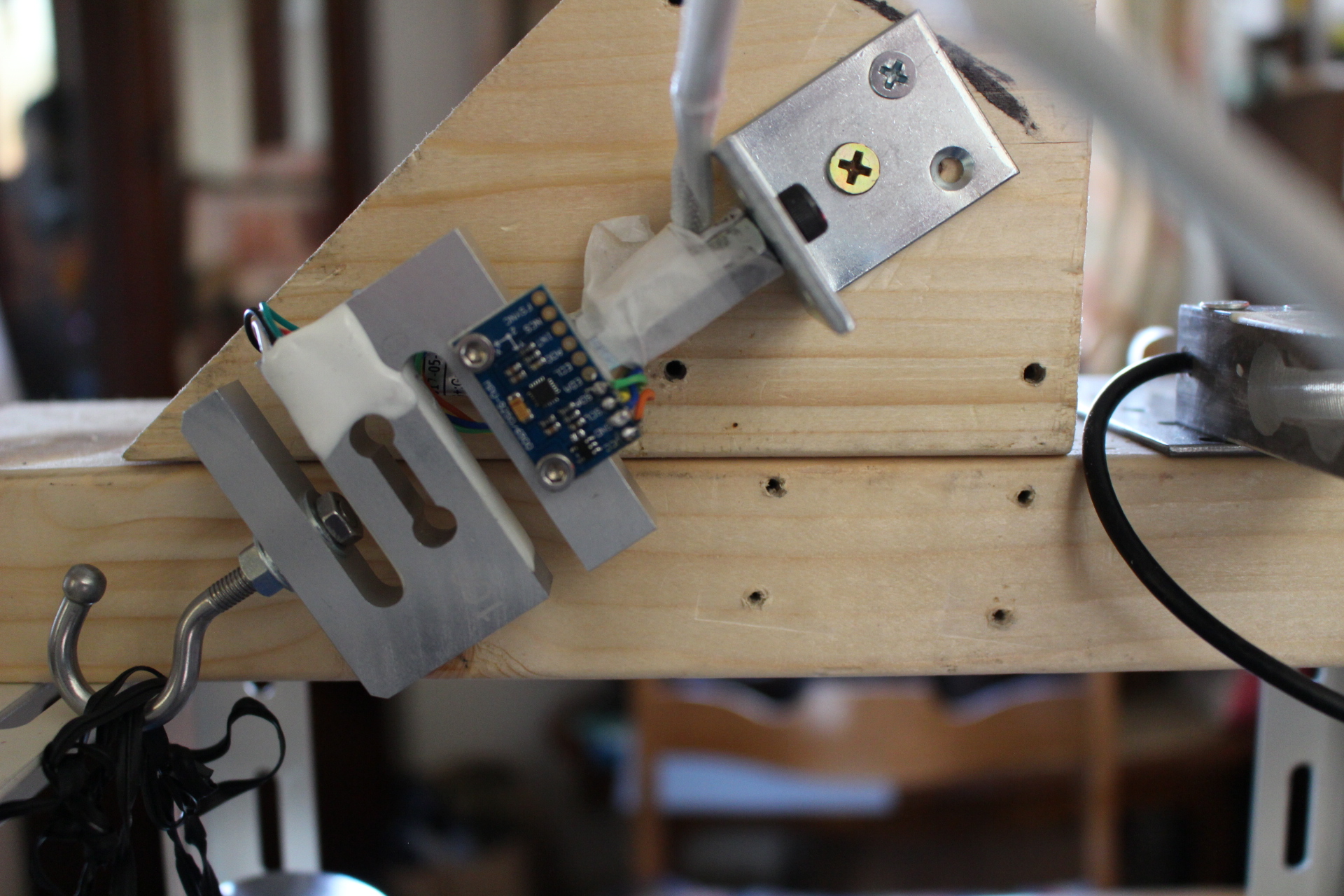
●検証実験
40kgのロードセルの先端50ミリ位置に糸をつけて糸を各種角度で引っ張って
i-Tension値をロードセル値と引っ張り角度を比較します。
まずは、水平に寝かせてゼロ点を合わせます。自重の影響をみます。

糸を引っ張ります。
●結果
引っ張り角度45度から90度の範囲で、i-Tensionとロードセル出力がずれてしまってます。
●考察
①上記校正からi-TensionとΘxyからの入力ベクトルが正しいとするとロードセルが怪しいということになります。
②6分力計でi-Tensionを校正したほうがわかりやすいかもしれません。
●以後
IMUを使ってみたのですが、欠点として、ヨー角度がでませんので
XY平面内で引っ張り作業をやるようにしてヨー角とZX平面での角度をふらなにようにしないと処理が面倒になる点で、実用実験をしていきます。