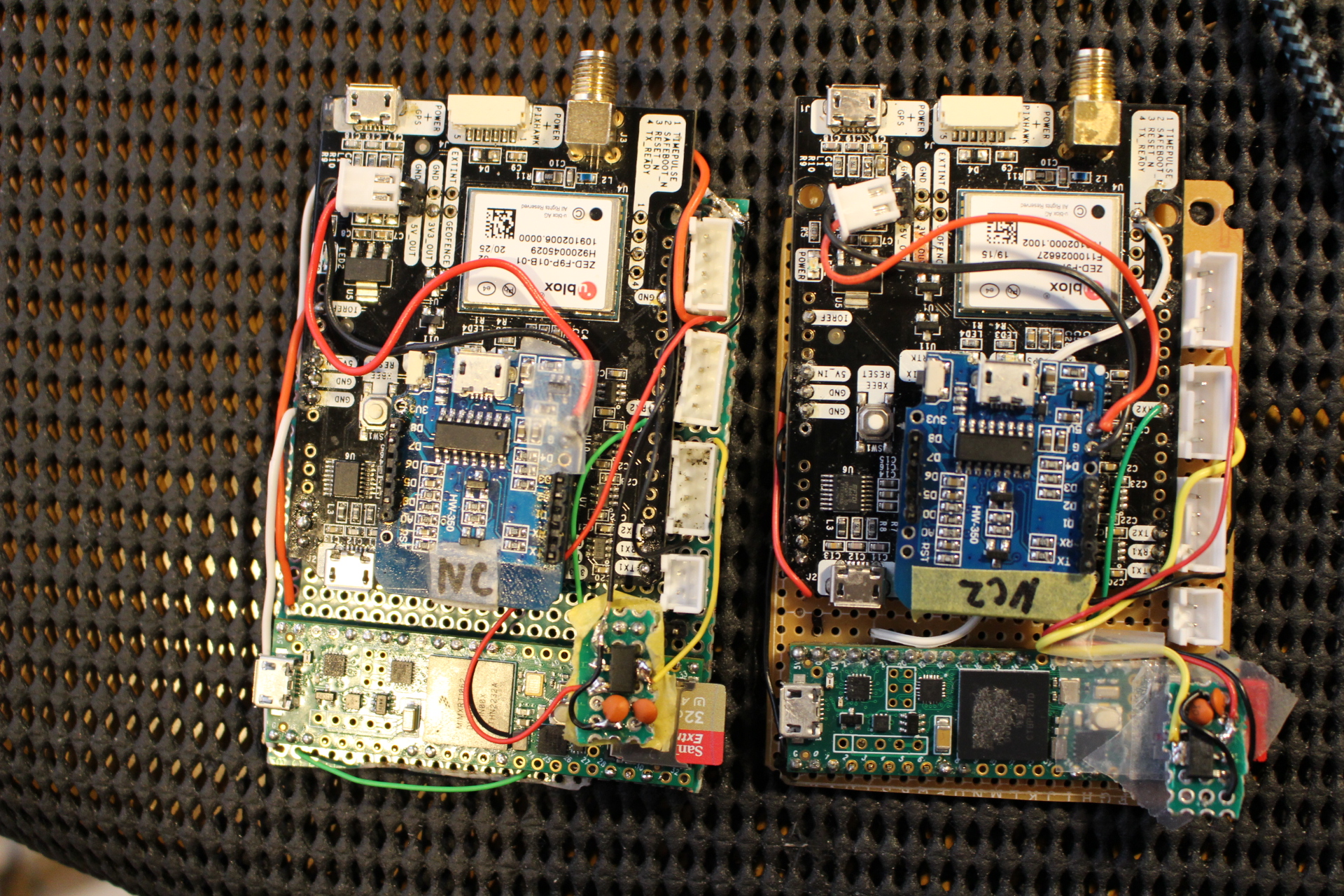
左が今回制作した左足用母艦基板、右が右足用母艦基板
急に暖かくなったので、雪解けが早まるということで、超特急で、左基板作成しました。
右基板をそっくりにコピーしたので、悩むことなくスムーズに制作できました。
母艦の機能は、F9P MovingBase、NTRIPレシーバーとして、ESP8266搭載、CPUにTeensy4.1を搭載、SDログ、BlueToothモジュール搭載(ESP32単体) Roverは、F9Hを採用。センサFUSION基板は、M9NとBZZNO055を搭載してます。
●左基板のメモ

①1年使ってなかったF9Pだったので、古いファームだったので、FW1.32にバージョンアップして
Moving Base Confguration ファイルも1.32用に切り替えました。
SimpleRTK2BのUSB経由での書き換えだったので、20分で完了できました。
やり方は、こちらの記事にあります。
②全高14ミリを死守するために、底面の半田盛りをできるだけ低くした。
左が今回制作した左足基板、右が最初に作った右足基板。
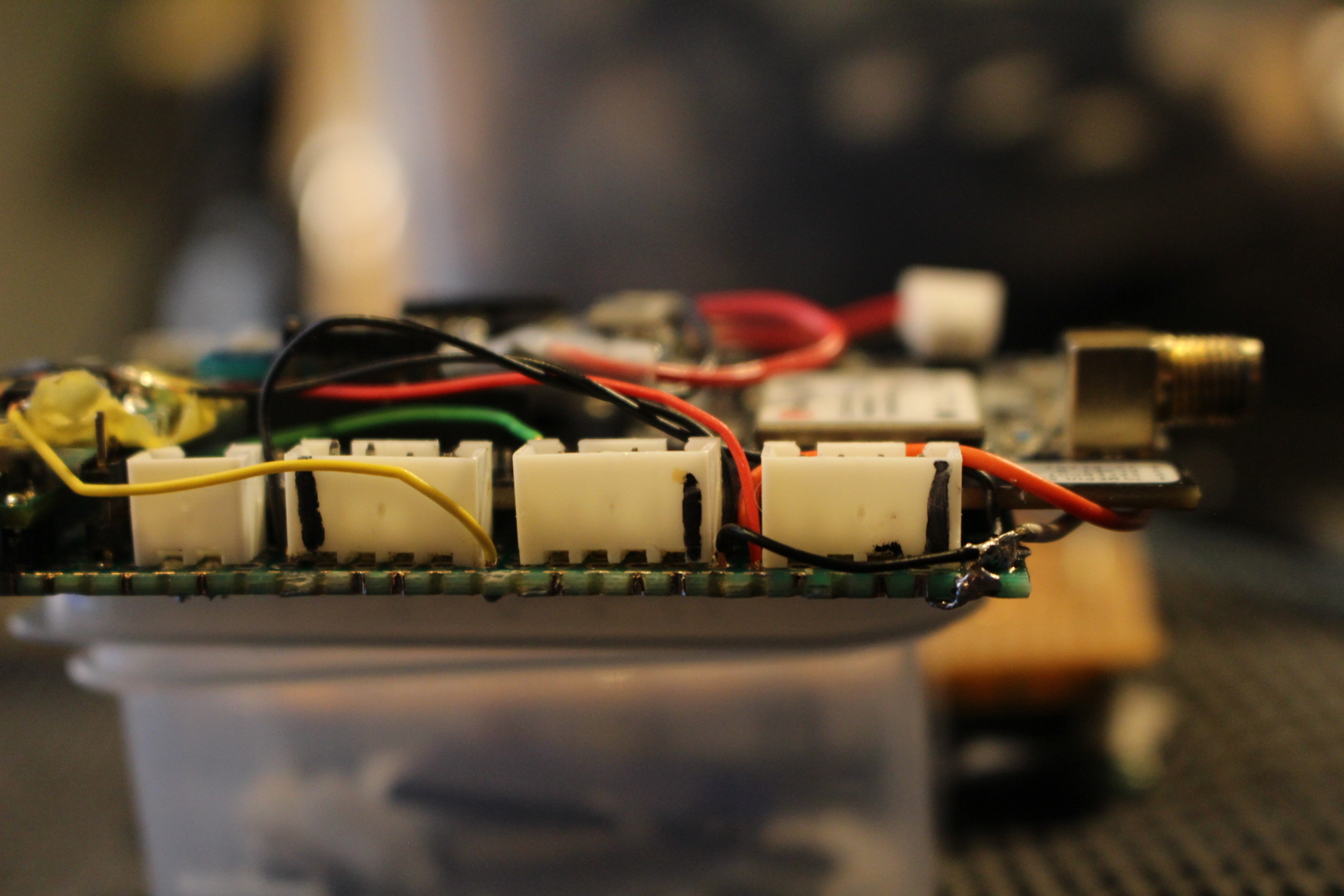
電源の引き回しを底面の鈴メッキ線でやっていたのを、今回は、やめて厚さを稼ぎました。
14ミリ高さを実現するのは、0.2ミリ単位で、節約しないと実現できません。

③配線順序のこつ
1)基板サイズをきめる
2)部品をのせる
3)電源線から配線をおこなう
4)信号線は、一個つけたら、動作確認までしてOKだったら次の信号線の半田付けをおこなう。

ということで、今回は、一発で、導通動作確認OKでした。
●以後
3月10日までに1-2回測定にいきます。
多分、3月20日くらいで雪がなくなるリスクがあるので、急ぎデータのみとって
ソフトは後回しにします。