MFT2018の申請も終わったので、今まで駆け足でTS1~TS5まで試作実験を回してきたことから離れて、世の中の力覚センサの研究論文はどうなっているか調べてみた。
今回は、Google Scholarという論文専門の検索を使った、
しかしJ-Stageが圧倒的に多く、ロボット学会、電気学会記論文が多かったが、電気学会は有料なので昔の論文なら無料でした。
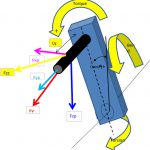
●同志社大学のクロスビームの論文
20x20という超小型4分力計の研究開発論文でクロストークの計算方法が説明されてあっておおいに助かります。
「ロボットハンド用薄型4軸力覚センサの開発」

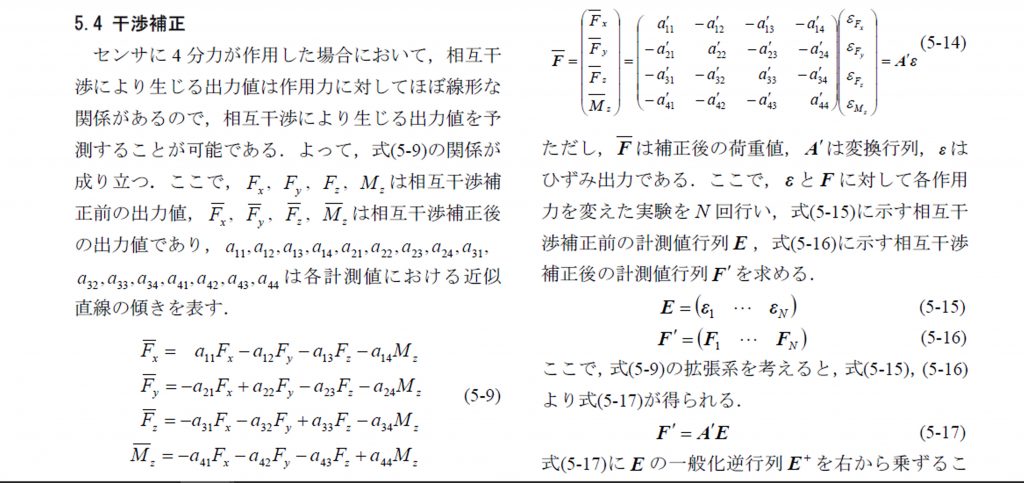
私がクロストークの補正と呼んでますが、干渉補正という名称で解説されてます。4元連立方程式を解くみたいです。
●静電容量型6分力力覚センサ
ロボットハンドに人間同様の動作をさせるために1990年台から研究されていた論文たくさんあります。
最近は、MEMSで作った小型の静電容量型力覚センサがはやってます。ロボットハンドの力覚用途には適しているそうです。
HBM社で分りやすい解説がありました。
https://www.hbm.com/jp/3719/piezoelectric-or-strain-gauge-based-force-transducers/
静電容量とは、コンデンサと同様で電荷をためてサブミクロンの電極間の微小変位で静電容量が変わる現象を圧縮力と比例させたMEMSセンサを複数組み合わせて6分力力覚センサをつくってます。ワコーテックのDynPicの考察をした記事があります。
静電容量なので電荷が時間とともに減っていくので、長時間の荷重状態はできませんので、動的な力の測定専用だそうです。
1分間に1Nもドリフトするので、マイコンでリアルタイムに補正かけないと使えないと思います。
※干渉補正の基礎学習
原理学習とVB.NETプログラミング
ProcessingMP逆行列プログラム
●以後
3Dプリンタで作ったロードセルのドリフトが馬鹿でかいと思って製品ではありえないと思っていたのですが、静電容量型も大きなドリフトがあるので、補正しないとゆっくりした荷重では使えないと思います。製品でもこのようなドリフトを補正する技術を使っているのをみて、本テーマでも安心して補正処理をいれていこうと思います。補正ありきで考えると今までNGだった形式もOKになる可能性がでるので、連休中に今までの反省とともに可能性を見逃していないかみてみます。
※2020/11/22追記
自作多分力センサの校正実験が膨大な工数でまともにできなかったのがここ3年の課題だったため
2020年夏から冬にかけて、スマート校正システム(SCP)の開発に取り組んでおります。
特徴1:被測定物の姿勢を変えたる治具を荷重別に変更したりしないで1姿勢、1治具だけで全荷重校正できる
特徴2:錘を使わずに、手で押すだけで入力ベクトルを定義して、リアルタイムにデータの線形性確認する
特徴3:計測終了直後にワンタッチで干渉補正して、補正結果の評価ができる
以上のような機能をもったシステムを構築してます。
カテゴリーはSCP https://shinshu-makers.net/shinshu_makers/?cat=48
11月中旬の動作始めてますが、自作多分力センサは、生データの校正結果は20%程度の誤差があるのですが
干渉補正で2-5%程度まで精度を向上させることができます。
※2020年11月末干渉補正を始めて3年になりますが、未だに完全に出来た例がございませんでした。
■なぜかというと、荷重作業量をどこまでやればいいのか見当がつかないのと、荷重作業が大変手間(治具作り、錘荷重)と時間がかかる点でやりきれない課題が重いです。
■2020年になって、その点を改良するためにSCP(スマートキャリブレーションプローブ)システムを開発して、干渉補正作業の合理化システムを開発して、11月末までに何とかチャンピオンデータがとれました。
SCPカテゴリーhttps://shinshu-makers.net/shinshu_makers/?cat=50
■絶大な効果:
錘レスで、指先で糸を引っ張るだけで、校正荷重作業が数分できてしまいます。6分力の干渉補正結果がでるまでが10分以内です。今までやりきれなかった作業が10分で完了してしまいます。
何十倍何百倍も生産性があがりましたので、4か月かけてSCPシステムを開発した甲斐がありました。