活動量計IMUで測定したいデータは、足の曲げ具合とターン回数です。MEMSで作られたIMUセンサの場合、電荷変化で微小変位をセンシングするので、電荷が時々刻々と消散してしまうので、誤差がどんどん増えていきます。そのため、各種の補正アルゴリズムが研究開発されてます。一般的なのは、加速度センサから重力方向に対しての傾き角を計算して、ジャイロ角度との補正を行うフィルタ処理です。

ここで解説ありました。
https://sites.google.com/site/nekolabwiki/electronic/posturecontroll
●カルマンフィルタとコンプリメンタリフィルタ(相補)が一般的です。
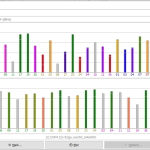
効果について動画あります。
http://garchiving.com/compare-drift-correction-by-processing/
https://youtube.com/watch?v=Yw4_JC5FIoM%3F
フィルタなしはぜんぜんだめですが、カルマンフィルタと相補フィルタは、似た感じです。いずれもヨー角度はだめなのがわかります。
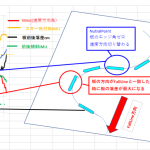
その理由は、加速度計の重力加速度変化は、ピッチ角、ロール角では
変化があって角度を計算できますが、ヨー角度は、重力加速に変化がない回転運動なので、加速度計の補正がききません。
つまり、フィルタを使っても、ヨー角度の補正は効かないということです。
http://blogs.wankuma.com/aoitan/archive/2010/10/06/193575.aspx
※2023年2月追記 本記事執筆から6年半後にFUSION付きIMUで再挑戦してます。
結果で初めてますが、BNO055のYAW精度は、RTKより5-10度劣ります。
しかし、スキー板の横の傾き エッジング角は精度よくでてます。
板に直付けしないで、ブーツの上にしばりつけたので振動の影響が少なくて済んだと思います。
IMU単独では、不足なので、RTKと同期させて、測定するのでベストです。室内だったら
LIDRと同期させればいいです。
●ヨー角度を得るために
運動中にどのような傾きになるかわからないので3軸の回転角度をおさえておけば、すべて包含できるはず、ということで、ヨー角度の検討をはじめました。
案:磁気センサからの方位データを利用する
=>磁気センサのデータをフィルタに入れて
精度をあげる。
磁気センサは、立ち上がり時のキャリブレーションが面倒ですが、
他に手段が思いつかないので、当面は、磁気センサデータをフィルタに利用する方式を検討していきます。