Bendセンサの次はTorisonセンサですが、スキーTopにIMUを設置するだけで出来てしまいました。
●安物IMUでも、Pitch Rollは、精度が良い(重力加速度のおかげです)
以前の基礎実験で、1.8度の傾きで±0.08度、0.3度の傾きで±0.067度と±0.1度以下の精度がでてました。
これを繰り返し精度で全体的にみると±0.5度以内の精度と結論づけました。
【STA23】BNO055で傾斜角の精度確認<GravityからRoll-Pitch計算>
ということで、この精度の良さを利用して、スキー板のねじれ変形を角度でセンシングする実験をしました。
●やり方
スキーTopにIMU MPU6500(安物の代表的IMU)を取り付けました。BNOを使わなかったのは、pitch rollだけでよいので、FUSIONは必要ないかあらです。重力加速度を含んだ加速度値さえわかれば、pitch roll計算できるので、Gyroも使わないで姿勢がわかるからです。
MPU6500は、大昔から電子工作で使われてきた格安IMUです。使用は非推奨なので生産中止に近いモデルです。
https://invensense.tdk.com/wp-content/uploads/2020/06/PS-MPU-6500A-01-v1.3.pdf
I2C接続で、Teensy4.1へ接続して、BnedSensorと同期させて、約10msec周期で、測定しました。
プログラムは、GISTに置いてあります。https://gist.github.com/dj1711572002/79d196f56ecfe3e83d3b632c16c0231f
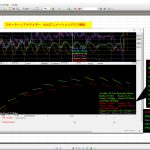
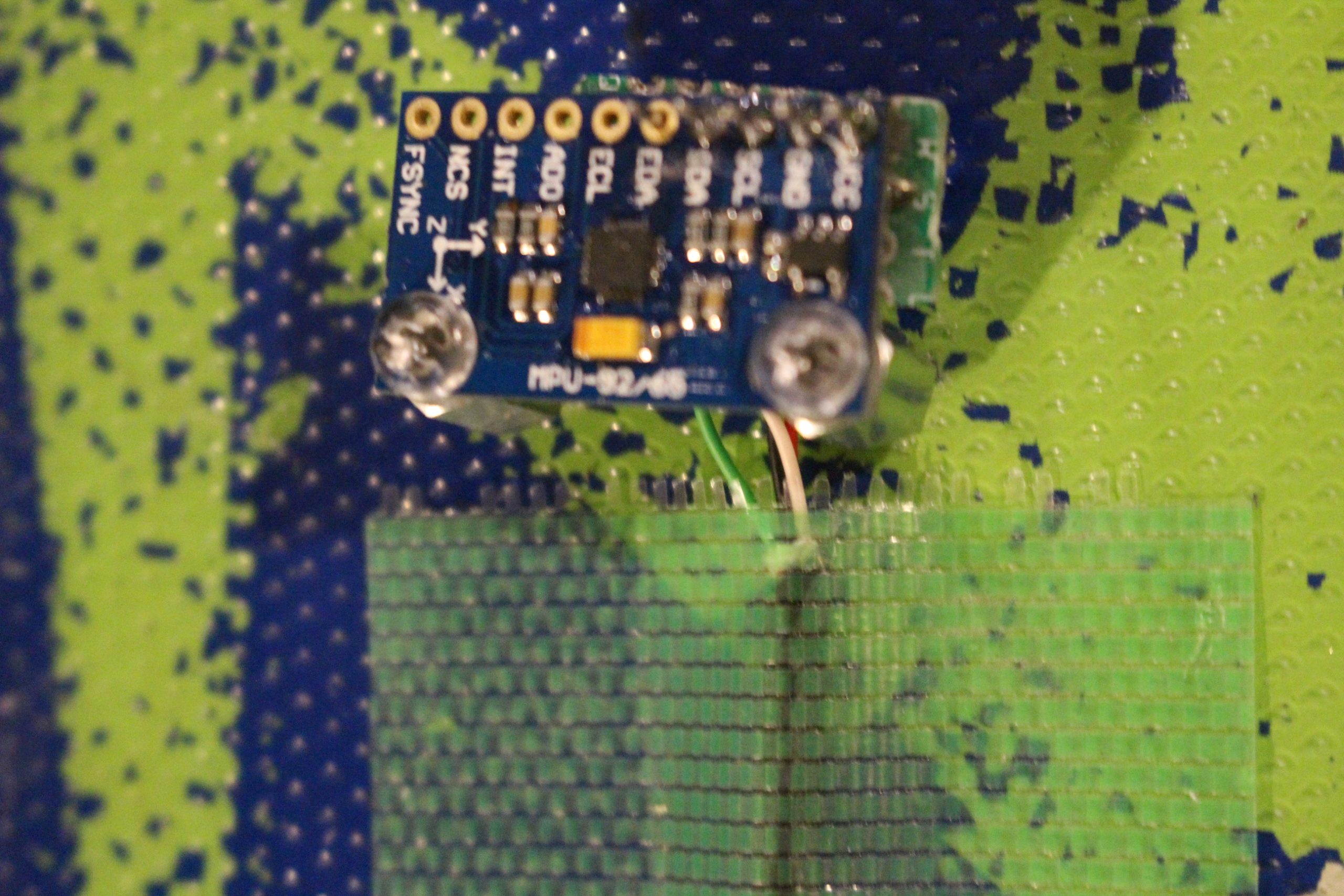
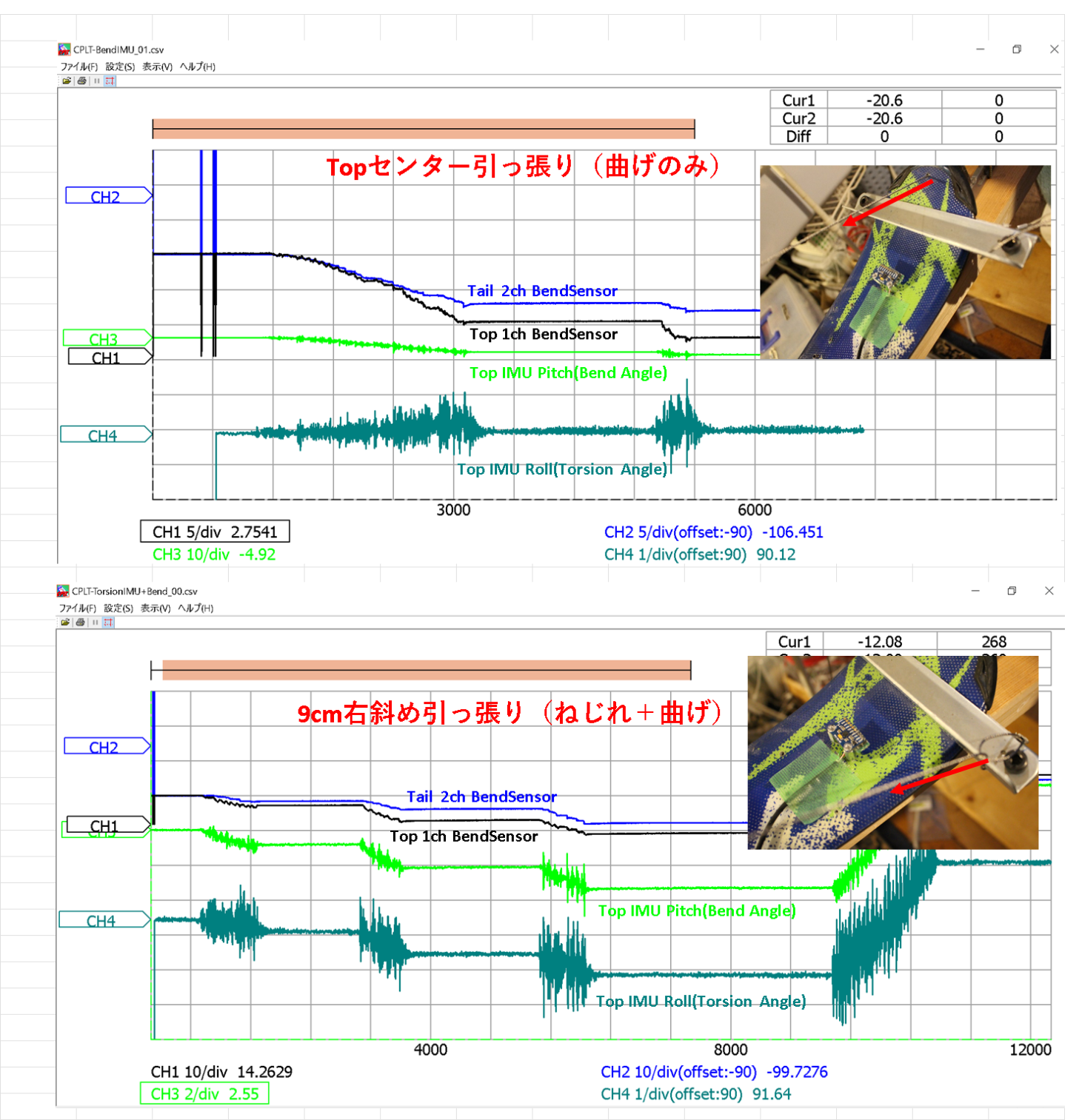
ねじれモーメントに負荷のしかたは、TopにL字バーを取り付けて、センターから9cm右の位置からワイヤを引っかけて
スキーブーツ位置のタワーから引っ張ると曲げとねじりのモーメントが加えることができます。

●結果
①最初にセンター引っ張りで、ねじれがセンシングされないのを確認しました。上のグラフの4CHがねじれのRoll角ですがフラットです。
②次に、9cm右から引っ張ります。ねじれと曲げがセンシングされてます。ちょっと引っ張っただけで1.5度ほどねじれ角がでてます。
●以後
実際の測定では、スキーセンターに設置したBNO085でスキー板の角付け角を測定して、TopとTailのIMUとの角度の違いからねじれ角計算します。そのため、MPU6500x2個とBNO085を接続同期ログプログラム作成します。RTKと同期させるので、手間がかかります。
更に、静的には、曲げねじれをセンシングできることが分かったので、動的で大丈夫かを簡易的にみます。
スキー滑走用の実装も始めないと、12月に間に合わないかもしれないので、9月末までで基礎実験終わらせて
3Dプリンタで、各種防水ケース、カバー類作り出します。