
データ処理プログラム一段落したので、STA24の最大の目標である。IMU yaw角とRTK MovingBaseのHeading角比較しました。
●条件
右足にBootsOnシステムとSkiOnシステムを装着して、測定しました。
●補正処理
直進を直線回帰して相関係数が0.999以上の区間で平均値をだして、headMotとyaw角の差を補正値とします。
直線区間が発生する毎に補正値を修正しながら補正をしていきます。
●判定の考え方
Tarajectory線図で、ズレを目視したときにそのズレがセンサ由来の誤差なのか本当にズレているのかを間違うようなセンサ側誤差をNGと考えます。
数値というよりは、Trajectory線図を拡大したときに見えたズレで判断します。
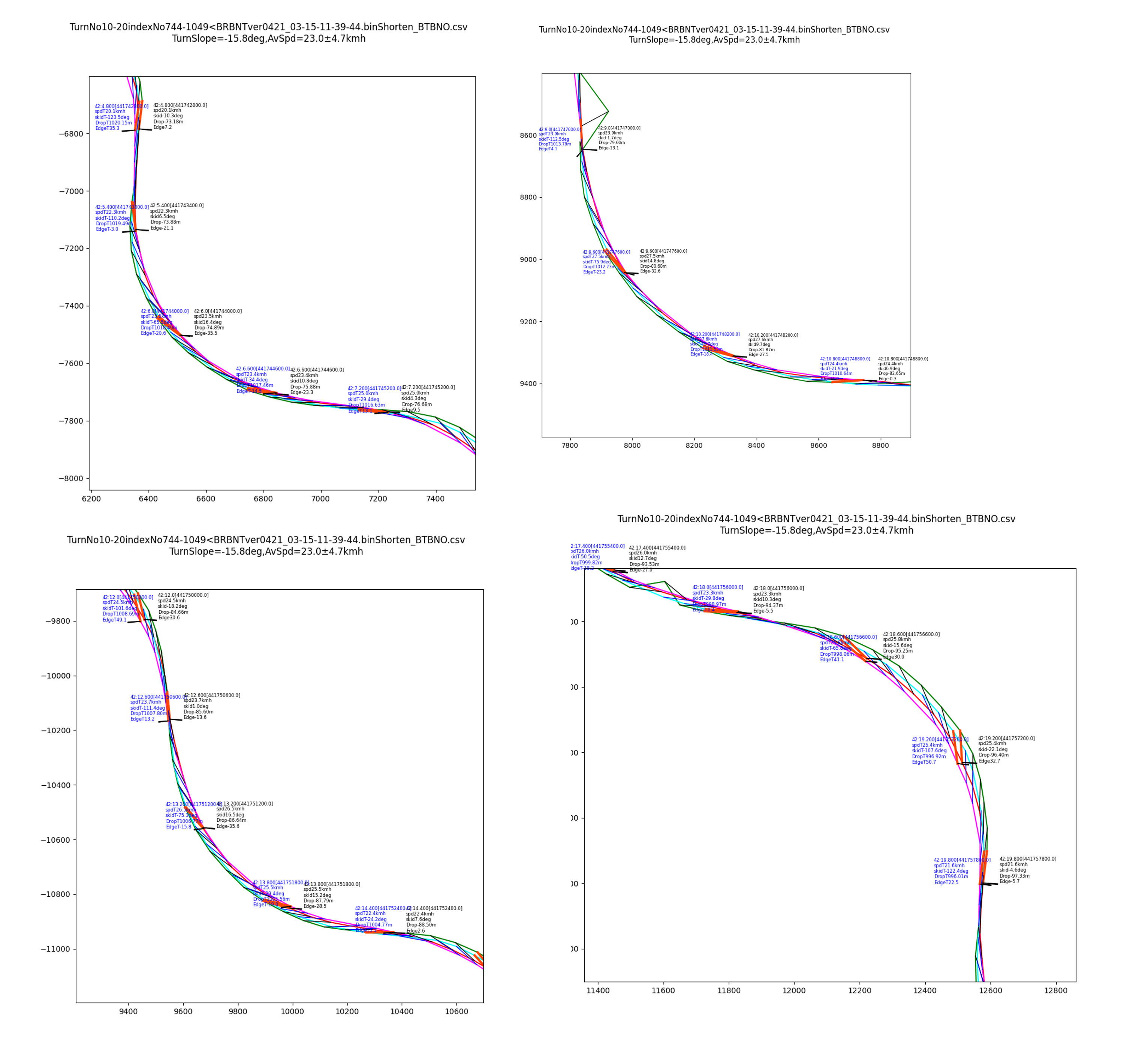
●補正結果のTrajectory線図でズレをみた
オレンジの太い線の左側がIMUのyaw角を補正した方向線、右側がRTK Heading線です。ぴったり合っていれば、重なるか平行になって見えるはずです。
両方が平行に見える場合と明らかに平行ではない場合が見えます。確率的には、30%くらいが平行になってません。
●時系列グラフでみてみると
右ターンの最初が10度レンジくらい広くて、ターン後半にかけてレンジで5度以下に収まってくる傾向にありますが、全体的には、レンジ10度 ±5度が相場です。

上のグラフだと重なって、合っているように見えますが、時系列を10データ1/divまで拡大すると明らかにズレているのがわかります。

●結論
①最大でレンジ15度くらいズレてしまう場所がある。
②良い範囲でもレンジ5度程度で±3度がベスト精度
③全体を平均してみると±5度が実力で、BNO085のスペック値で統計的に落ち着いてしまう。
④FUSION処理後の値を補正しても、条件がコロコロかわると一定のFUSION処理でないので、事後の補正はあまり意味がない。
ということで、BootsOnでのIMU単独のスキーHeading精度は±5度程度と結論づけます。
●STA24でのheading角要求精度
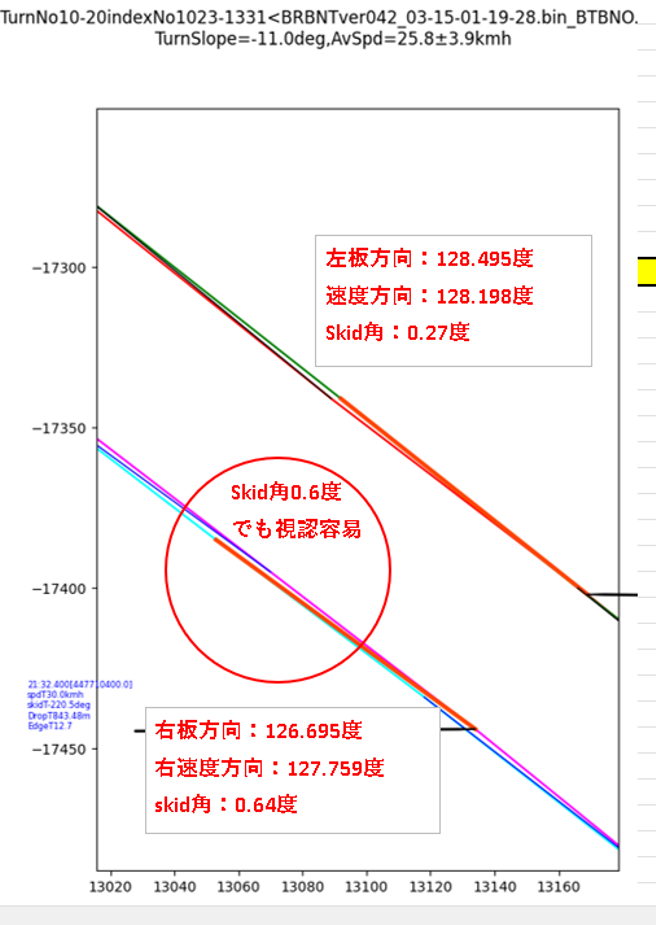
STA24ではズレているかズレてないかを目視できることを最重要としてます。
例えば、直滑降でのズレがどのくらいで見えるかのグラフとみると skid角(ズレ角)が0.6度でも目視で認識できてしまうので、
IMUのyaw角の精度レンジでなく、 RTK MovingBaseの精度の世界でないとスキーのズレの評価判定ができないということになります。






