F9Pの補間システムの実験はじめてます。自動車では、F9PとM9Nの速度ベクトルは高い相関がみられました。
今回は、ArmMotion(腕の動き)のような旋回動作で小半径で低速な動きで、F9PとM9Nの相関を調べてみました。
※8月4日追記 モードを変更しながら、測定データを観察してますが、自動車走行の時のように、F9Pとの相関が0.98以上になる場合はありませんでした。速度ベクトル自体の波形もF9P、M9Nともに乱れ気味でした。
これは、ドップラー効果の原理から考えると、低速では、衛星電波の周波数の違いが微小になるので、ノイズをかぶり易いのだと思います。自動車走行でも時速20kmh以下になるとノイズがおおきく、データの信頼性が低下したので、本実験のように2m/sec(時速7.2kmh)程度の低速では、精度の良い速度ベクトルが得られないのではないかと理解しました。そこで、現在の回転半径30cmを大きくして、90cmにして、1rpmで20kmhでるように、長い棒の先にアンテナを固定して、回転実験するようにして、再度F9PとM9Nの速度ベクトル精度の比較実験をすることにしました。多分、大幅に精度が上がって、相関も高くなると期待してます。
●測定治具
ロードバイクのホイールを利用して、半径275mm位置にアンテナを固定して、F9PとM9Nで回転させて
測定します。BlueToothSPPでPCへ直接取り込んでログしてから、Excelでデータを解析します。
システムは、teensy4.1+RN42BlueToothモジュールを使ってます。

●治具の目的
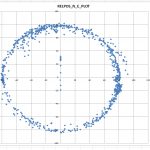
F9Pの10Hzだと下図のように軌跡がすかすかでしか測定できません。
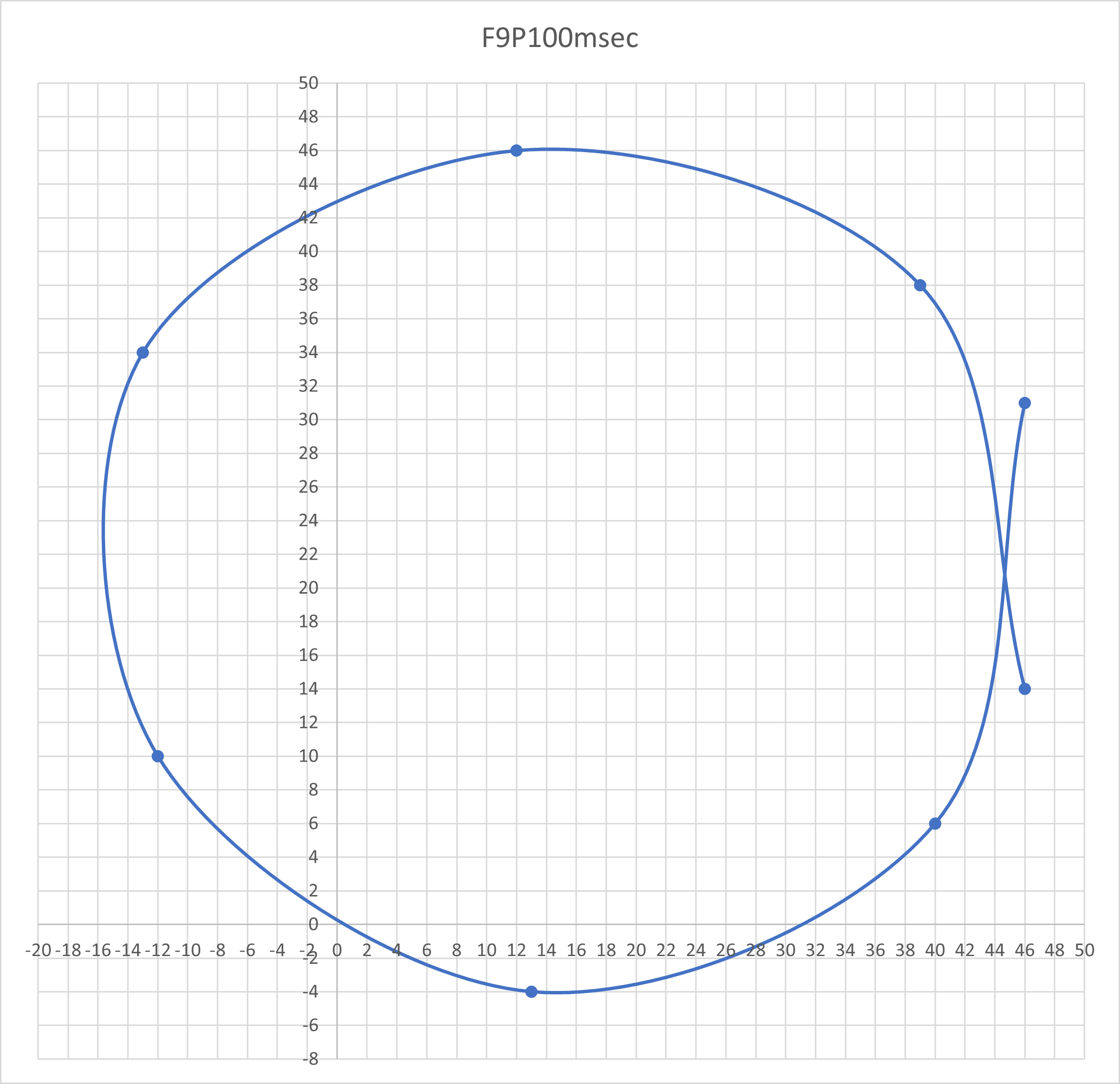
このすかすかの間をM9Nで埋めるという目的です。M9Nは25Hzなので、間に2-3ポイントはいるので
軌跡の測定精度がまともになると思います。
それを実現するには、M9Nの速度ベクトルを積分して相対位置をだして、F9Pの測位値と照会して、
値を最適化しないといけません。M9N自体の測定モードがいろいろあるので、その辺の調査して、
進めていくので、夏から秋までかかるかもしれません。
●結果
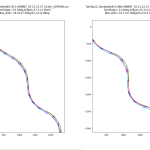
①勢いよく回して減速させながら測定
F9PとM9Nの速度ベクトル(Gspeed,velN,velE,headMot)を比較した
下記は、Defaultモードです。1000mm/sec以上は、データになってません。
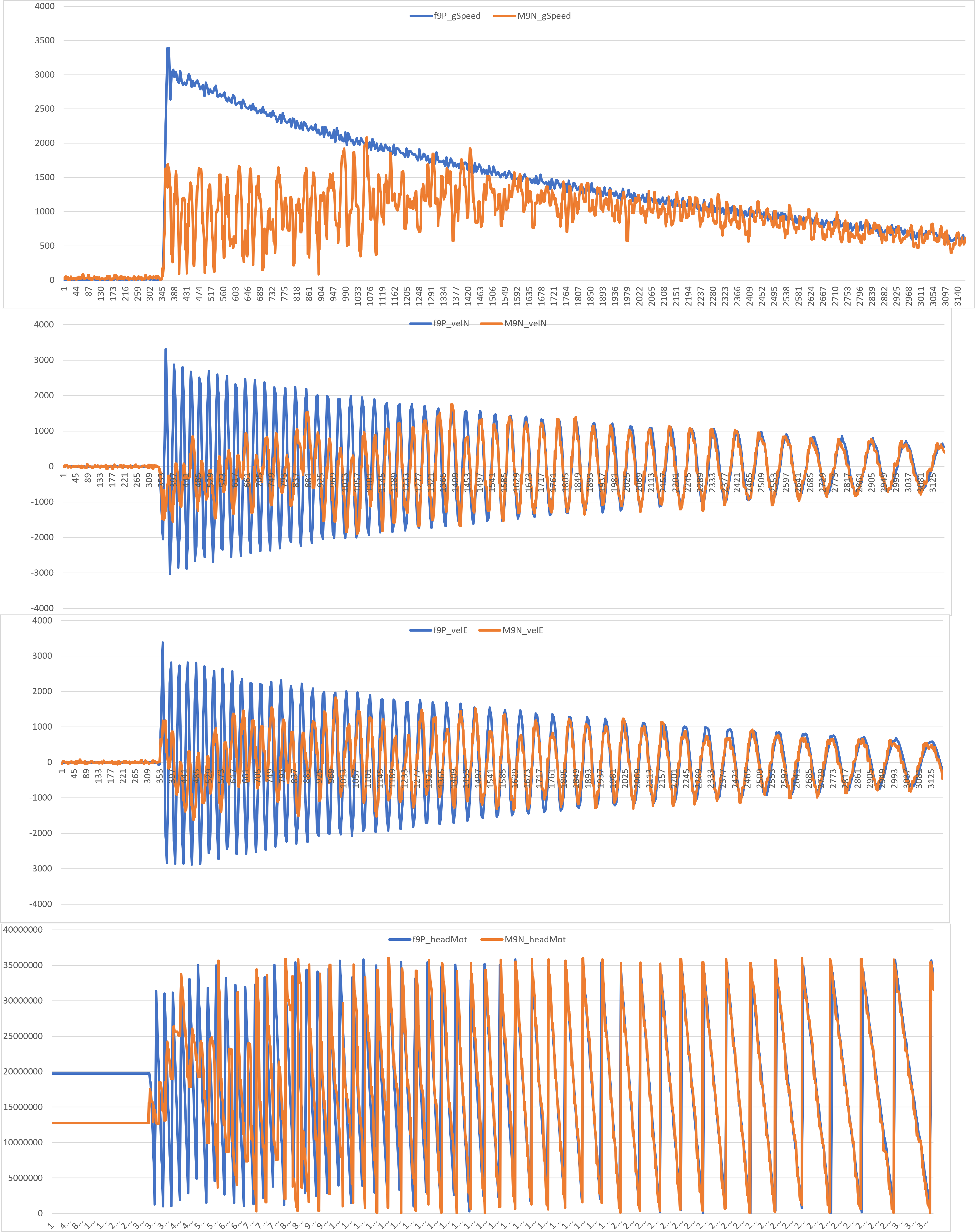
結果:gSpeedが1000mm/sec以下でないとM9Nの速度ベクトルがF9Pと一致しない。
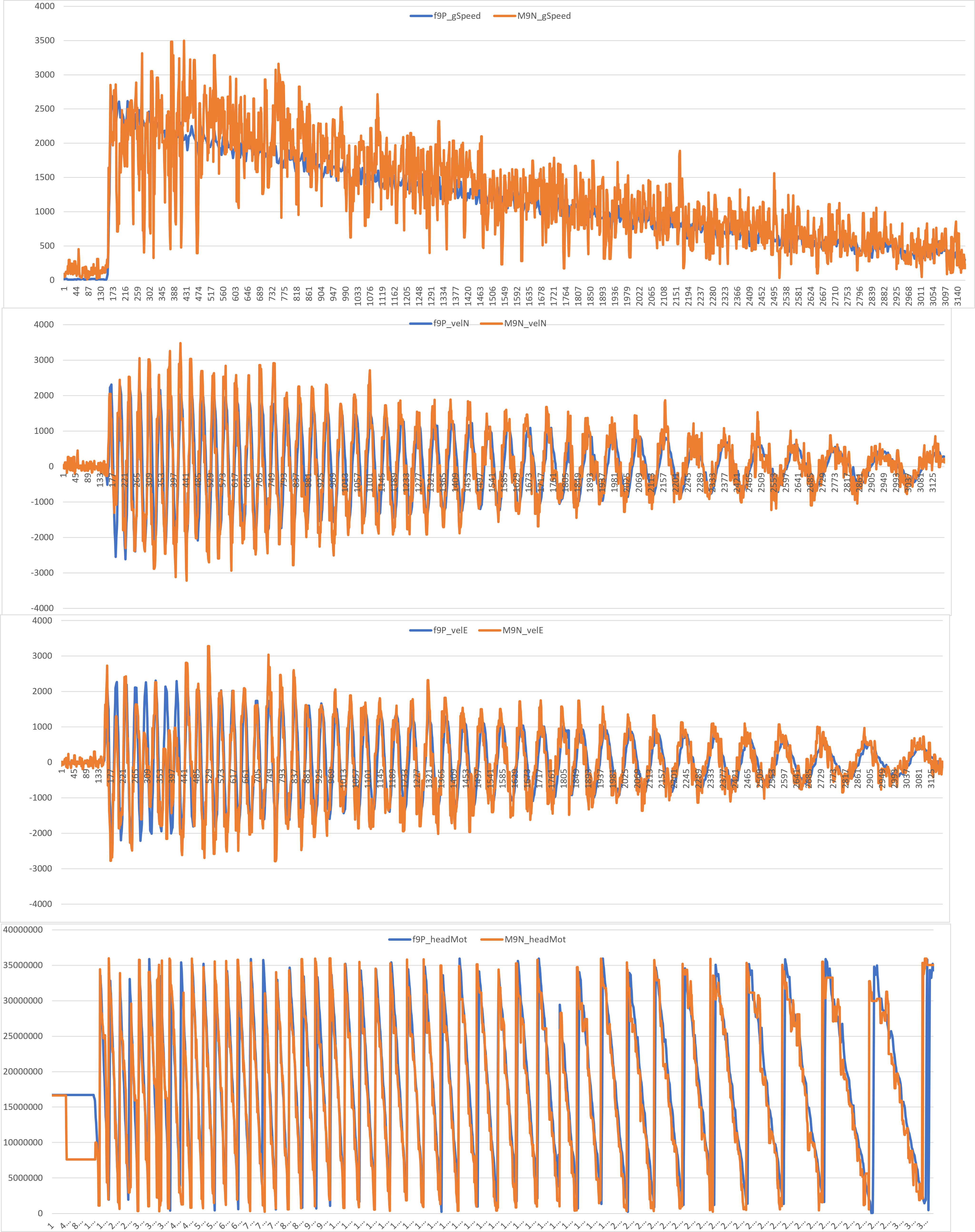
②半径30cmで2m/secの円運動だと、加速度(向心力)が2G近くでるので、きつい運動モードとして
airbone 4G モードがあるので、それで、自宅庭で深夜やってみました。
このモードだと、追従性がよくF9Pと相関が高そうですので、このモードでSKYPARKでいろいろ測定実験してみます。スキーに近いのは自転車なので、自転車でどうなるかがポイントだと思います。
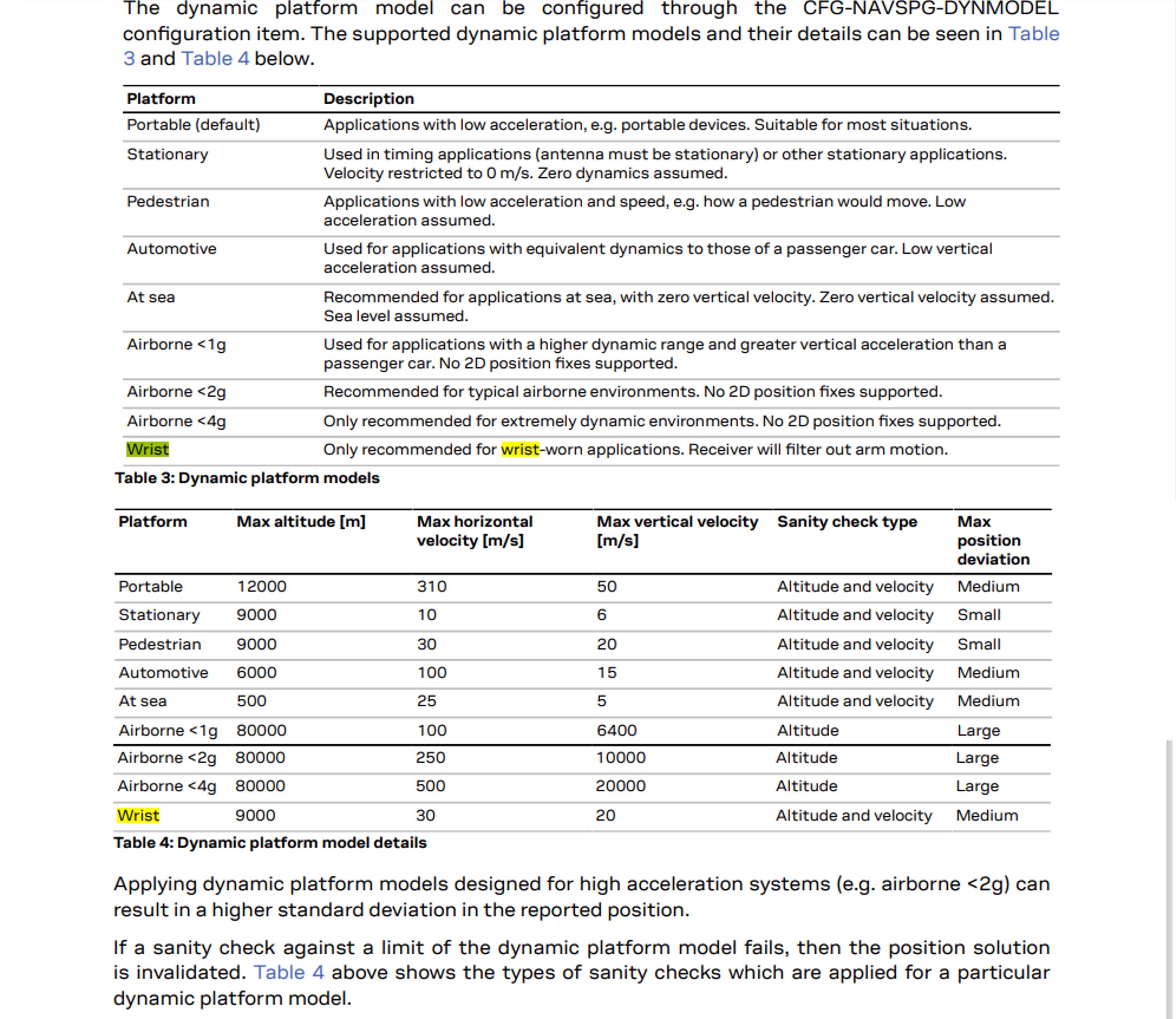
●モードの変え方IntegrationManula
M9NのIntegrationManulaでは、Arm Motionもprotocol 19.2以上で対応と書いてあります。
M9NをUSBコネクタに接続してUcenterでconfig=>NAV5を開くとモードのダイアログがでるので
コンボボックスから、各モード(12個くらいある)を選択して、send+Reciever sendで登録します。
デフォルトでは。Portableになっているのですが、歩行、自動車とか船とか腕がありますが、
腕をやってみたら、全然ダメでした。airbone4Gが一番良かったです。
自転車の場合は、Rが30cmということはないので、Automotiveのほうがいいかもしれません。
モードの選定基準も定量化してプログラムに盛り込む必要が発生しました。M9Nも速度ベクトル高精度
と言ってますが、いろいろフィルタ適応して精度を稼いでいると理解しました。
●以後
本件、不明点が多いのでUbloxのサポートに質問を投げましたので、回答待ちとなります。