本テーマはPDRという分野に属することを知りました。ここ20年程海外で多くの研究がなされてますが、最近は、自動運転技術の影響でIMUだけではなく、多センサ(LIDR等)とAI等アルゴリズムを使っているようです。Google PDR
私見ですが、位置推定分野では、RTKほど精度が出る技術はないので、RTKの弱点をカバーする技術開発の方向しかないと思います。
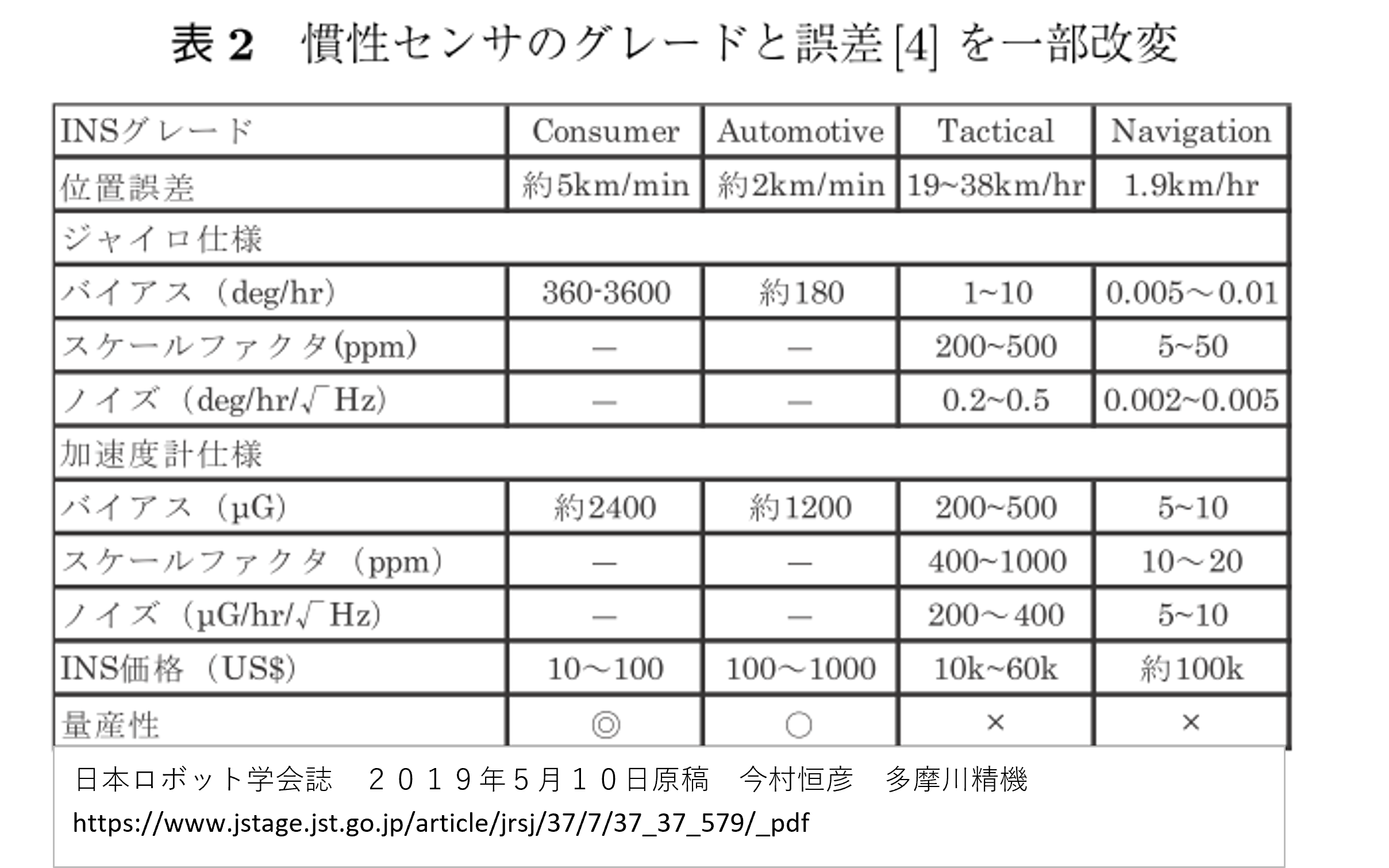
●IMUの位置精度
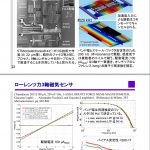
航空機用のレーザーリングジャイロでさえ1時間で1.9km誤差がでてしまいます。IMU単独では、飛行機は飛べないことがわかります。
https://www.jstage.jst.go.jp/article/jrsj/37/7/37_37_579/_pdf
信州MAKERSでは、MEMS製IMUでは、積分誤差が大きくて、動きの変位が得られないのでGNSS RTK技術を使って運動測定をしてます。すでにスキー滑走分野では、RTK技術の精度が実証されてます。歩行は、スキーより複雑で周期が速い点で、IMUを補助的に使う方法を考えてます。本記事は、電子工作中級者向けなので、初級者の方は、数カ月程基礎を学習してから、本記事の内容を実験してみてください。
1Base2Rover方式は、歩行計測で有利な組み合わせですが、RTK歩行計測の最大課題は、サンプリング周期の遅さです。8Hz=125msecでは、一歩が2-3データしかでないので、とても正確な計測はできません。そこで、IMUを使って補間することが可能か検討を始めました。
無理やりRTKを使うわけではなく、リアルタイム歩行計測に必要なパラメータを総括的に得られるセンシング技術としてRTKがあるという認識です。特に重心位置の3次元動作と足の動きが完全に同期してcm精度で判る点は、他の計測技術ではできないRTKの強みだと考えている次第です。従来の歩行計測は、カメラ、トレッドミルなど固定された室内空間での測定です。
それに比べ屋外で装置無しに自力走行でリアルタイムに全パラメータを測定できる技術はRTKとIMUの組み合わせしかないと考えてます。
※2022年6月日追記 IMUの代わりに高速のGPSドップラーを使うアイデアがでました。
IMU単独でkalmanフィルターを使っても、位置推定精度がでないので、IMU以外で速度、方角などのセンサが
ないとフィルターがきかないという点でGPSドップラーなら速度ベクトルが20Hzー50Hzで得られるので
RTKとは、別に高速のGPSチップを追加する検討を始めました。詳細は下記記事です。
速度ベクトルの精度いいので、MRMS IMUより使えそうです。
※2021年10月追記
Ardusimple社から50HzMovingBase測定可能なSeptentrio Mosaic-Hチップボード発売されました。
10万円前後で購入できるので、本記事のようIMUで補完する必要がなくなります。
スキー用途で使いたいのですが歩行用途でも使えるか検討してみたいです。歩行は、IMUのほうが詳細なデータ
とれそうなので、IMU方式メインで考えていきます。
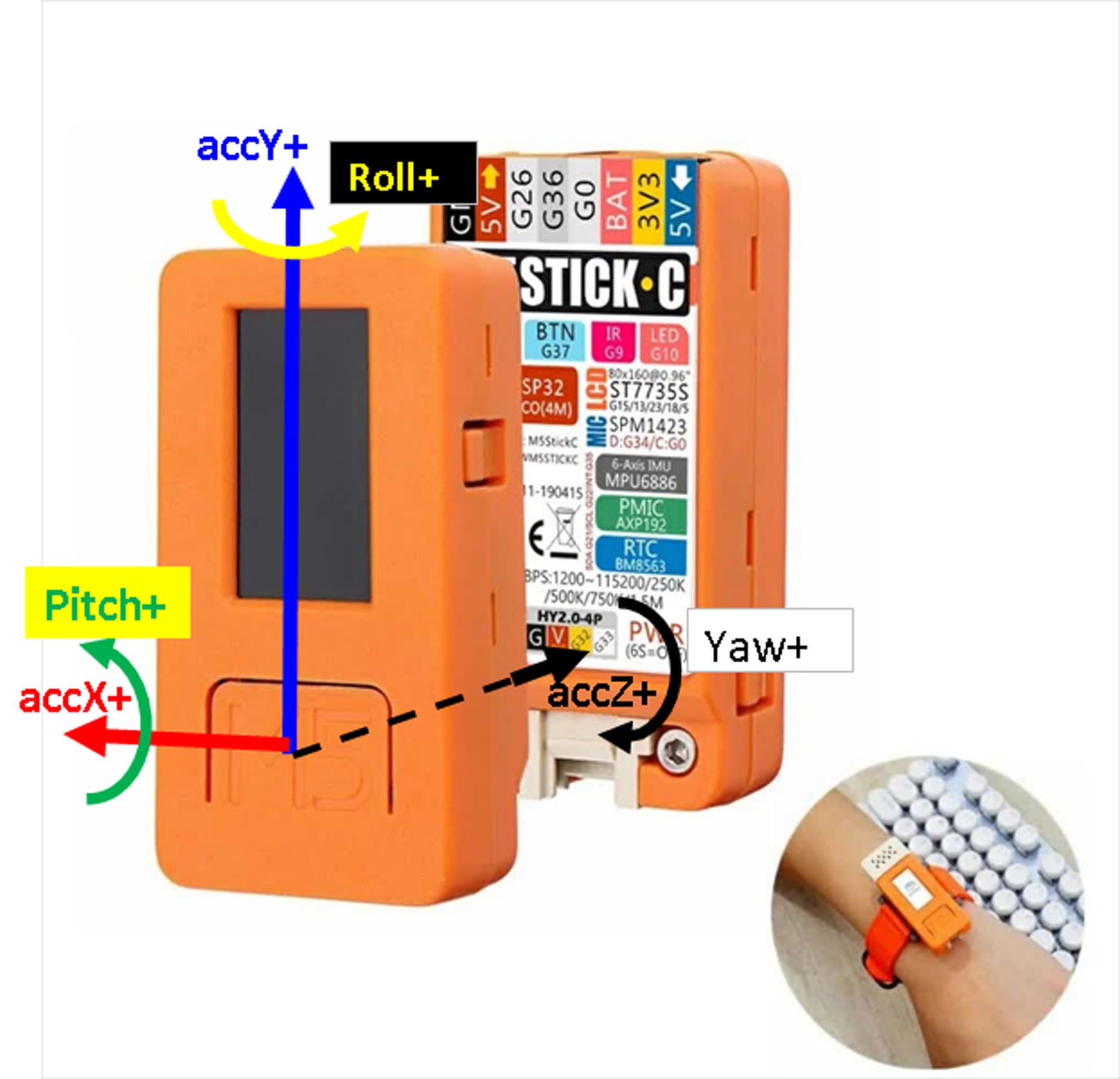
●M5StickCは、IMU付で便利です。
おなじみLangShip様の解説が入口になります。
https://lang-ship.com/blog/work/m5stickc-imu-mpu6886/
ここで不足している部分を自分で補います。
XYZ方向が判らなかったので、傾けながら方向を調べました。
鉛直下に1Gの重力がかかっているので、下向きに1G付近の出力がでいれば、+方向です。
WEBでもたくさん事例がありますが、中には逆方向の矢印がついている場合がありますが、
それは間違いではなくプログラムの±の処理が違うだけです。
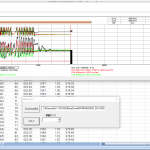
今回私が使ったプログラムは、ArduinoIDEのファイル>スケッチ例>M5StickC>BASIC>IMU
です。このソースのM5.LcdをSerialに変更して、Lcd専用命令コメントアウトすれば出来上がりです。最後のdelay(1000)は、LCDの表示速度が遅いためつけてるのですが、Serial.printならdelayは必要なく、5~6msec周期で出力できました。
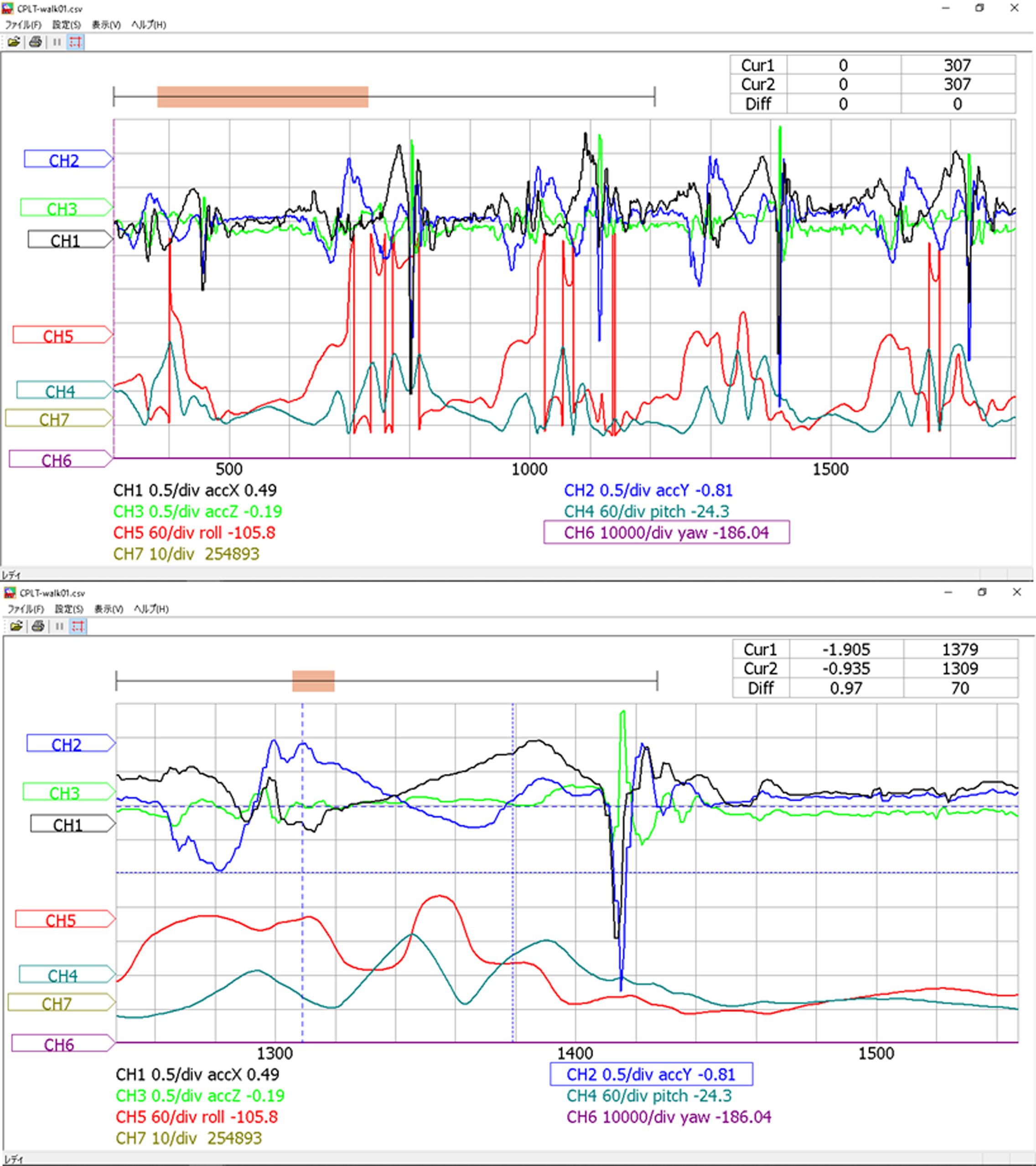
7ch出力で、accX,accY,accZ,pitch,roll,yaw,millis()CRLF と出力してCPLTで読みます●●
ソースはこちらに置いてあります。
https://gist.github.com/dj1711572002/27f79698f0326e1b511ea39368bdc2d0

●右足靴下に挟み込んで歩いてみた。
accYが真下向きで、accXが前向き、accZが内股向きになります。
接地の瞬間青のaccYがマイナス2G近くまではね下がります。
accXもマイナス1G以上にはね下がります。接地のショックを表してます。
接地波形は、5msecですので、サンプリングを5msecより速くしないと見逃します。とてもRTKではわからない世界です。
●RTKとの同期
RTKのiTOWデータをESP-NOWで送ってIMUデータと同期をとります。
接地タイミングを基本として1歩の定義を行い歩幅がでます。
●歩行研究の調査
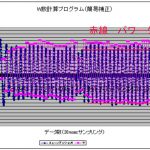
歩行の研究は、バイオメカニクス、リハビリ整体、ロボット分野などで、膨大な論文と教科書がでてますので、後日調査結果まとめます。エネルギーとパワー観点で調査します。
●RTKの補間
RTKの軌跡とIMUの積分波形を比較して、どのような
補間をすればいいか実験しながら検討していきます。
●コト作りの目標
歩行を何故やるのかは、自分の歩行の効率を求めたいからです。「歩行のパワーメーター」が欲しいということです。
上手な歩き方と下手は歩き方で相当効率が違いそうなので
自分の歩き方は、多分へたくそなので、データを見ながら
修正していきたいです。更に老齢化とともにどういう歩行になるのか記録できれば、健康維持にも役立ちます。フレイルという分野です。
信州MAKERSでやる意味は、RTK MovingBaseを使った歩行測定は
未だ誰もやってないのではないかと思います。
●STAとの関連
歩行もスキーも1歩、1ターンと一塊のデータが連続して続く運動です。
解析TOOLは、同じアルゴリズムでできるので歩行用システムのノウハウをSTAに使えるはずです。