SCP校正台に円筒型6分力センサを載せて、3軸SCPで、錘を載せて校正しました。
この円筒型6分力センサは2年前にFxFy精度は良いがモーメントが不明だったので、モーメント精度を見たいので、フォースプレートとして、校正してみました。フォースプレートとすれば、モーメント値が位置精度として表現できるので、判り易いからです。
●荷重と座標を確実に管理する
前回の記事で荷重位置の説明があります。
錘は、3個で264g、272g,272g合計808gまで3水準

それぞれの荷重位置を色で識別します。グラフの色ですが、データを扱う上白でEXCEL上でセル色としても区分して見やすくしてます。
=>何しろ干渉補正計算は、データに少しでも矛盾が発生すると収束しないのでとんでもない値に化けてしまいます。荷重位置とモーメントの正負記号の入力が最も間違い易いので、定義系をしっかり頭に詰め込んでおかないとはまります。
FxFyFzMxMyMz座標は、完璧に頭に突っ込んでおかないといけません。
右手の法則に忠実に決めます。

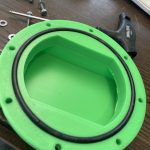
●測定風景

前回のSCP3の構成を変更してSCP2となってます。荷重値は手入力でいれて、線形計算してます。Fzは、6分力センサ側のFz秋月20kg中華ロードセルです。

●干渉補正結果(Excel行列計算を手動でおこないました)
Excelを使った干渉補正の基礎はこちらの記事にあります。
参考にExcelファイル添付します。Excel2007です。
(マクロが速いのでずっと2007です)
SCp_ForcePlate_FzmxMy
①測定データ
荷重水準:0g、264g、563g、808g
位置水準:9か所、中心からの座標X Y:0mm,60mm,-60mmの組合わせ
※赤から黒まで9色で位置とデータを合わせてます。
ひずみ電圧値:6分力センサのFz、Mx,Myを使う。
Excelに下記のように並べます。
※電圧値は、荷重ゼロでゼロmVになるように調整しておきます。
※モーメントの正負を間違うと収束しませんので、必ず右手の法則を守ってください。右手の法則に慣れてないと干渉補正できません。

②干渉補正計算
下記式を使って、3x3の行列式の計算を行います。
1行1列セルに下記式を入れて、Shift+Ctrl+Enter(SCE)を
と押すと、Excelは行列式だと認識して3×3セルを自動計算してくれます。
データの指定は、
ひずみ電圧データの行列=M5:O40
与えた分力値の行列=E5:G40
です。逆にしないように注意です。
| MMULT(MMULT(MINVERSE(MMULT(TRANSPOSE(M5:O40),M5:O40)),TRANSPOSE(M5:O40)),E5:G40) |
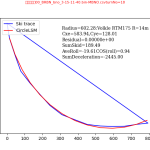
③結果
得られた干渉補正係数を検算して誤差を求めると
Fz荷重3σ ±13g
MxモーメントによるY座標位置±4.6mm
MyモーメントによるX座標位置±1.6mm
※Mxモーメント精度が極端に悪いのは何か理由がありそうです。SCP校正で6軸全部校正するときに解析します。

■検算生データ

●フォースプレートで遊んでみたら
VBプログラムに干渉補正結果の行列をいれて、位置座標を計算させる機能を追加しました。結果として計算ばらつき以内の位置精度で収まっていることが確認できました。
モーメントのバラツキが位置によって30%もずれているのに
干渉補正で、数%台に抑えられているので効果は大きいですが、
もともとモーメントが30%もばらつく点でセンサ自体を見直す必要が
あると思います、センサを少しでもよくすれば、もっと干渉補正の精度が
上がると思います。
●以後
SCP校正台でFzの次は、姿勢をかえながら、Fx,Fyを同様に校正測定して干渉補正を入れていきます。
※2020年11月追記
本記事の干渉補正前の状態をまとめてみました。

■干渉補正は必要か?
メーカー製品の多分力ロードセルは、モノ自体が干渉が少なく設計調整されいるため、干渉補正なくても1%以内の精度を確保できてますが、素人自作の多分力センサは、工作精度が稚拙で、軸の傾き、ズレなど多発してます。
それらの誤差をまとめて、カバーするのが干渉補正ですので、素人自作多分力センサには、必須のアイテムだと考えてます。
ちなみに今回の生データでの測定位置別直線回帰と干渉補正後の直線回帰での3分力成分の誤差補正は精度が10倍よくなる等、劇的に改善されてます。

■各位置でのモーメントのバラツキ大きいが
下表は、各測定点におけるMxMyの直線回帰の傾き(SLOPE)の表ですが
前後左右で対称でなければいけないのですが、バラバラなので
相当いい加減なモーメント分布になっているということです。
1)⑧のMxSLOPE=-49.387となってますが、対称の⑦が72.1008で
32%もずれているので、何か間違っているのではないかと思うくらいおかしいです。
2)⑧のMySLOPE=72.3169ですが⑨のMySLOPE=-49.517ですので
これも32%ずれてます。1)と同様のズレ傾向です。
原因考察:座標が傾いていたりセンターズレの可能性がある
=>センターズレの確認と補正方法を検討する必要がある
=>傾き(軸の傾き)について影響をシミュレーションする必要がある。


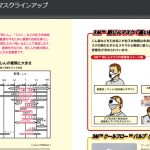
※追記11月19日
本記事の測定プログラムSerial_Graphic_monitor_rev76ですが、SCPスマート校正と干渉補正結果反映機能を
組み込んだrev79を使って、短時間で干渉補正ができるようになりました。
ver78で測定したデータをEXCELでデータを手動で加工して、干渉補正計算して精度評価した場合小一時間かかったのですがver79では、SCPスマート校正データをMatrxi_Calculator_rev04に渡せば1分で干渉補正結果がでてきてそれを再度SCPスマート校正して全水準で再測定して精度評価しても15分以内に完了するようになりました。
生産性が4倍以上になったので、これからいろいろな校正方法の改良実験が大量に可能となりました。
まずは、干渉補正の評価方法の検討実験をやってみました。
※2021年11月追記 人が乗れるフォースプレート開発
干渉補正をMatrixCalculator rev04で実施した事例です。