ようやくTOFと治具の準備ができたので、試運転でデータを測定して積分処理してみました。
●やり方
治具上で60㎜~360mmにストッパをつけて手でゆっくりと往復移動させてTOF値と加速度XY値をログしました。
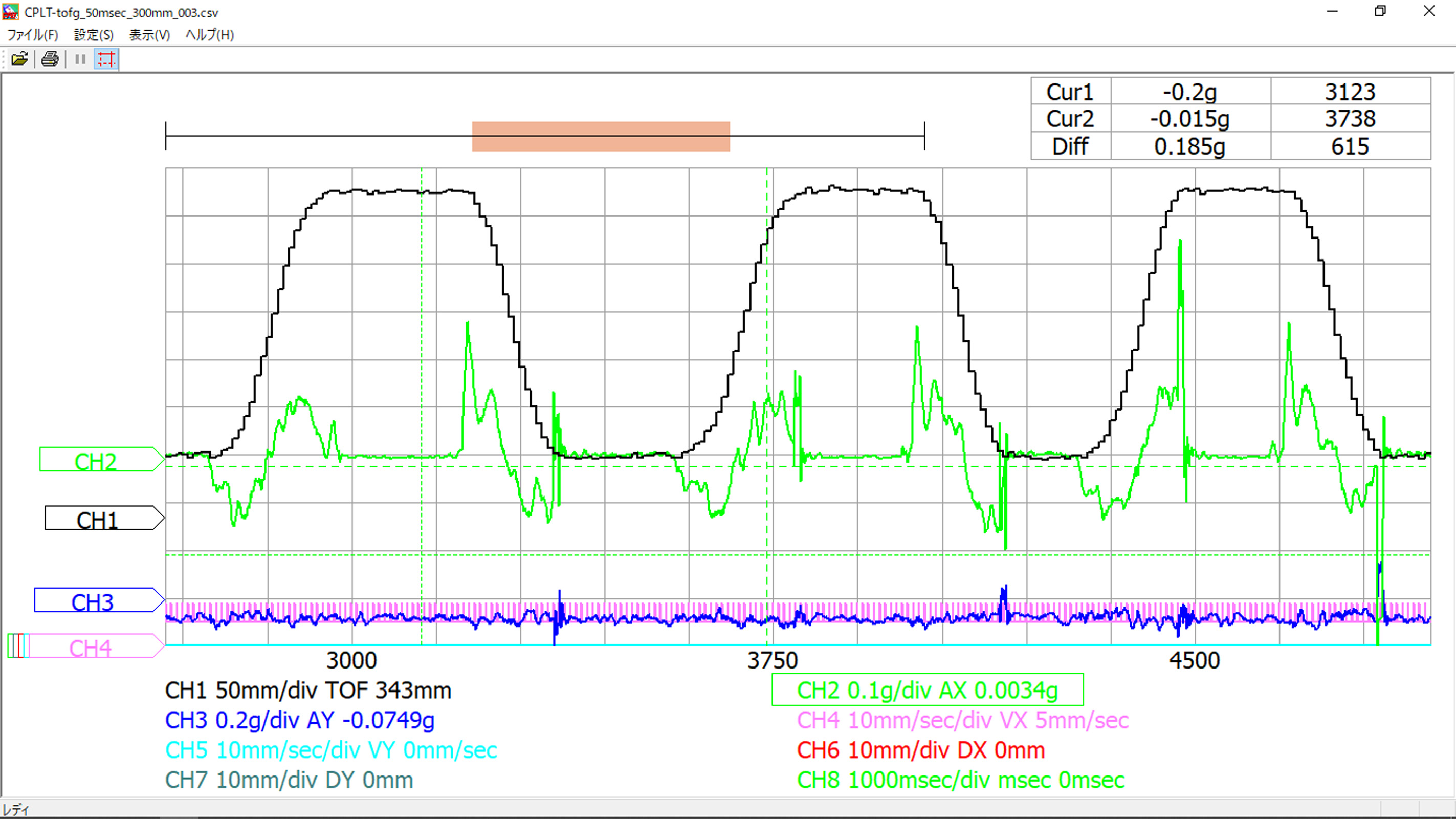
①CPLTで生ログをとります。
データ間のタイムスタンプをとらないと積分時間が決まりません。TOFの読み込み時間が9msecとながくなります。加速度のADCは5msecです。
➁CPLTのCSVファイルをEXCELで読み込みます。
■加速度センサの校正値はマイコン側で計算しているのですが、わずかにズレが
発生しているので、その時点でのセンサのゼロベースを直前で平均して
ゼロベースの補正をすることが重要です。ゼロベースが全積分区間に加算されるので
距離の値がずいぶん違ってきます。300mmに対して±80mmくらいは狂います

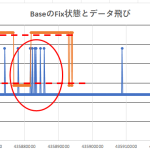
■CPLTの波形から積分範囲を選択します。加速度波形の立ちあがりとTOFの立ち上がりが同時になる一歩手前を選択
手前すぎると距離が長くなりすぎるし、短すぎると距離が足りなくなるので
積分範囲の選定も重要です。ゼロベースほど違いませんが重要です。

■速度Voffと距離Doffを計算します。
台形積分するだけです。
速度=(1個手前の加速度g+今の加速度g)*9800mm/sec/2*区間時刻msec/1000
+前の台形積分速度
距離=(1個手前の速度mm/sec+今の速度mm/sec)/2*区間時刻msec/1000
+前の台形積分距離
③結果
ゼロベースを合わせて、TOFの値を300mmの補正してグラフにしました。
積分距離もほぼ300㎜±15mmにでました。途中の速度変化もある程度でてます。

●以後
TOF治具で加速度を2回積分して、距離を出す実験ができそうなことが判りましたので、どこまで使えるかを実験していきます。
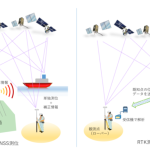
最終的にMovongBase RTKの精度補間ができるように目指します。