インテリジェントエクストルーダ制作をこつこつと進めてます。3DPのエクストルーダは2種類あって
ボーデン型とダイレクト型ですが、搬送力と押出力の特性がずいぶん違います。そこで、両方とも測定できる
ようにロードセルをエクストルーダ機構にくみこんであります。
●構造
FEEDモーターをロードセルで支持して搬送力の反力を測定します。
現在は、ダイレクト型取り付けですが、このモーターユニットをホットエンドから離してテフロンチューブで
結べば、ボーデン型になります。ボーデン型の場合、テフロンチューブ内の摩擦、フィラメントのそりがあるので、モーターの搬送力とホットエンドへかかる力が大きくなって、搬送信号に対して、一対一の動作はしないのではないかと考えてます。
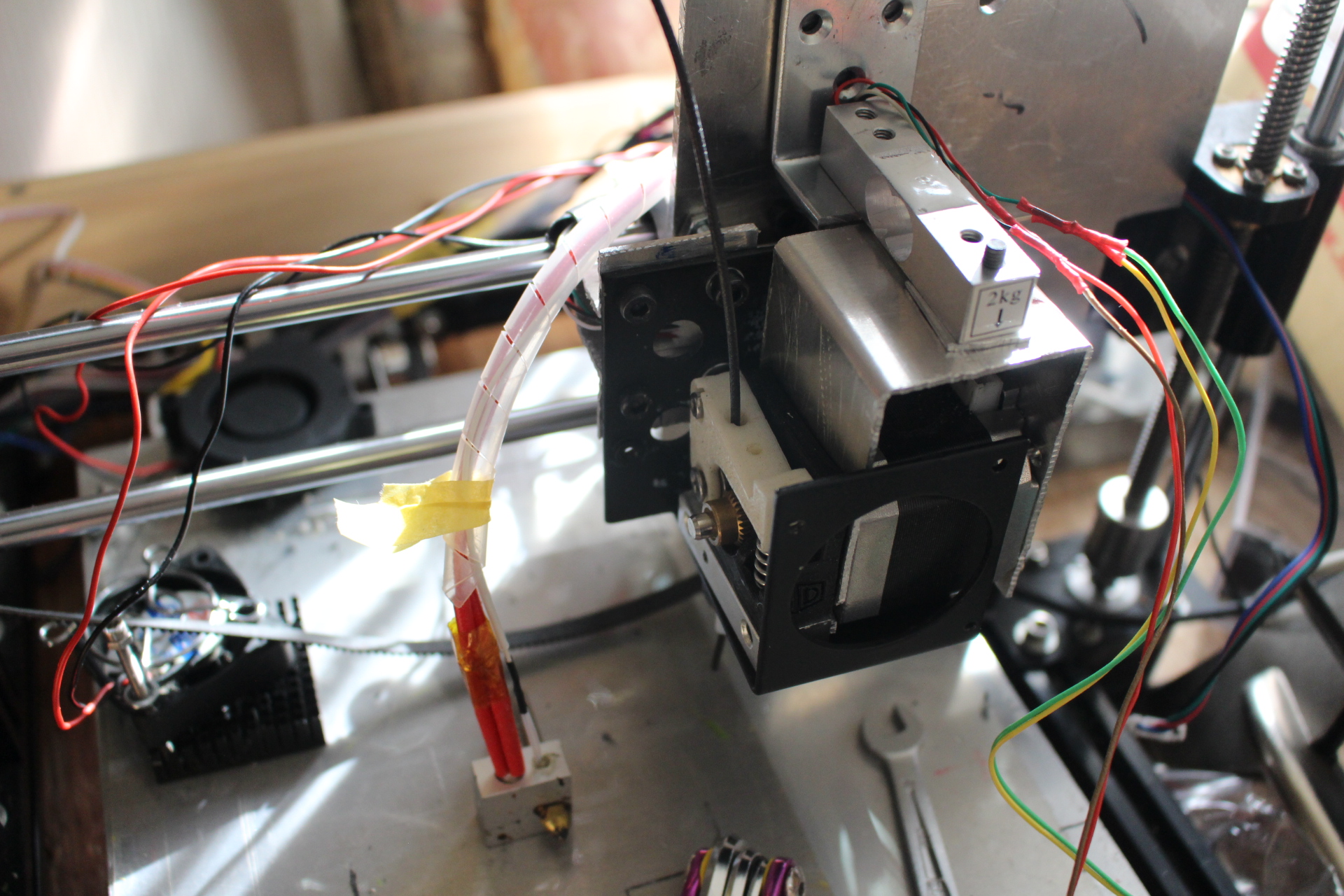
モーターは重いので3ミリ厚のL字金具で支えてあります。

ホットエンド用のロードセルは、フレームとフレームの間にアルミ1.5mm厚さのサドル型金具で支持してあります。

この機構の特徴は、ホットエンドとモーターが別支持機構で支えられてるので、それぞれに負荷される力を独立して測定できる点です。フィラメントは高速で押し出されます。熱で溶融しながら押し出されるので、粘弾性的な力の発生があると思います。この2つの力間は、動的に違った波形となって、押出現象が観察できればIEの基礎実験として有用だと考えてます。

●次にフィラメントの送り速度
モーターの搬送は、ホットエンドの抵抗でスリップしますので、それを測定しながら2つの力を観察しないと何がなんだかわからなくなるので、フィラメントの速度センサをつけます。
モーターフレームの上の空間に小型のエンコーダーを仕込みます。
このエンコーダはCOPAL製の RES20D50-201-1
ダイアルを回すセンサ用ですが、分解能がA相で50パルスB相と組み合わせて100パルスあるので
エンコーダーとしても使えます。しかし、A-B間の精度が悪いのでプラスマイナス2パルス程度は誤差がでるかもしれません。

●以後
エンコーダー軸径がΦ6ですが、3DP押し出すギア類はΦ5が多いので、Φ6をΦ5に変換するジョイントかカプリングをアマゾンで注文してあるので、到着してからエンコーダ組み立てを始めます。