6軸力覚センサで噛む力解析準備して、測定開始しました。
準備作業の動画アップしました。
今回の干渉補正は、重心点を噛む力を受ける受力板上の中心点を座標原点にして、各種分力を定義して干渉補正を行いました。
ねじりモーメントが誤差が大きく使えませんでしたが他の
5分力は、5%程度の精度では使えていると思います。
干渉補正の解説はM後日行います。
●初期の解析結果
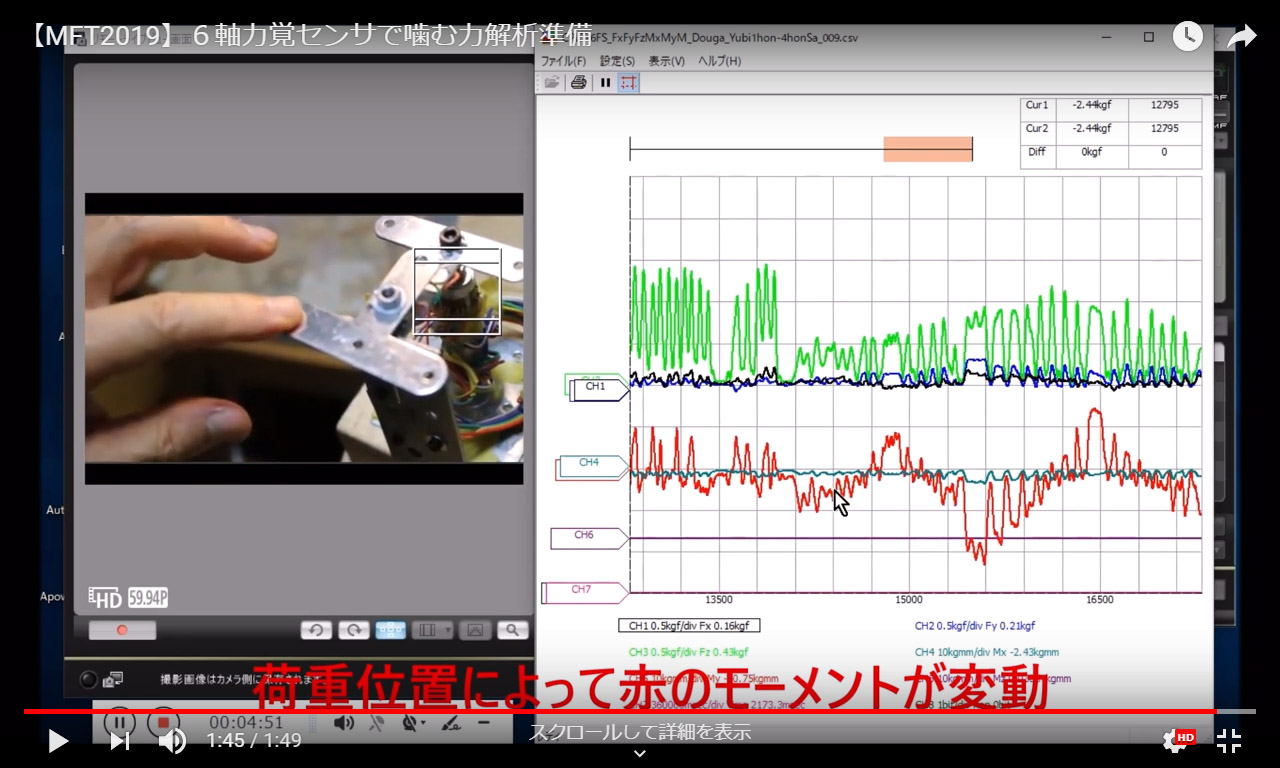
噛んだ時のグラフをみると
緑の噛む力(Fz圧縮力)が大きくて、青の前後力、黒の左右力が弱いのが判る、更に噛む力、前後力、左右力の3つの力が単独ではなく互いに同時発生している点がマウスポインタとしてのパラメータとして使うのを難しくしている。(センサの干渉ではなく、人間の噛む力が複合力で発生するということです)

結果1:噛む力1kg以上容易に発生するが、前後力左右力が無理しても数百gしか発生しない
結果2:前後力、左右力が発生すると同時に噛む力もいろいろ変動するので、独立したパラメータとして噛む力をマウスポインタとして利用するのが難しいです。
●ゴムの効果
①ゴムを貼ってなければ滑って、噛む力しか発生しません

②緑色の滑り止めゴムでも前後では後方向しか力がでない

●網状のゴムでは、前後力がでるが、未だ剛性が足りない

●クワエルマウスへの展開
WS機での結果を裏付ける解析結果がでてきたので、6軸力覚センサをツールとして、噛む力を解析しながらクワエルマウスの開発を進めていくことは有効だと判断します
方向性1:噛む力はメインのパラメータとして使わないで主に、センサ本体を支える力として利用する=>WSで実証済み
方向性2:前後、左右の力が発生させるのに結構無理やり動かしたいる点で、パラメータとしては未だ苦しいので、もう少し詳細に6軸力覚センサで歯の動きと分力の発生を観察して、ベストな方法を検討していく必要がある。
方向性3:力を受けるゴム材料ばかりでなく、形状として、複雑な形状で分力を伝えやすくできる可能性があるので3DPで造形しながら力覚センサで解析していくことも可能性がありそう。
●以後
動画1本目ができたので、あとは、WSのマウスポイント動作をいかに見せるかという動画を7日までに作ります。