STA24データ処理もPythonで処理できるようになったところで、最重要課題のheading角をyaw角で代用可能かの検討を始めます。夏ごろまで検討をして、STA24の結論をだします。
生データをオフセットだけ補正しても、yaw角が±5度以内でおさまる範囲と10度以上はずれる範囲がでてます。
一定の規則性があれば補正可能ですので、多数のデータからyaw角とheading角の誤差を観察していきます。
●データの選択のために観察
IMUは、SkiOnシステムでは、スキーに固定されたボックス内のRTK基板上に固定してあるものと、BootsOnシステムでブーツ上のRTKボックス内の固定してあるもの2か所で測定してありますが、両者の違いをみてみました。
青線がheading角灰色線がブーツ上のyaw角とheading角との差、黄土色線がスキー上のyaw角とheading角の差
※heading角の見方は、
①上昇している部分は方向角が増えているので時計回りCW方向、スキーで言えば右ターン(左足谷右山足)
②下降している部分は方向角が減っているので反時計回りCCW方向、スキーで言えば左ターン(右足谷左山足)
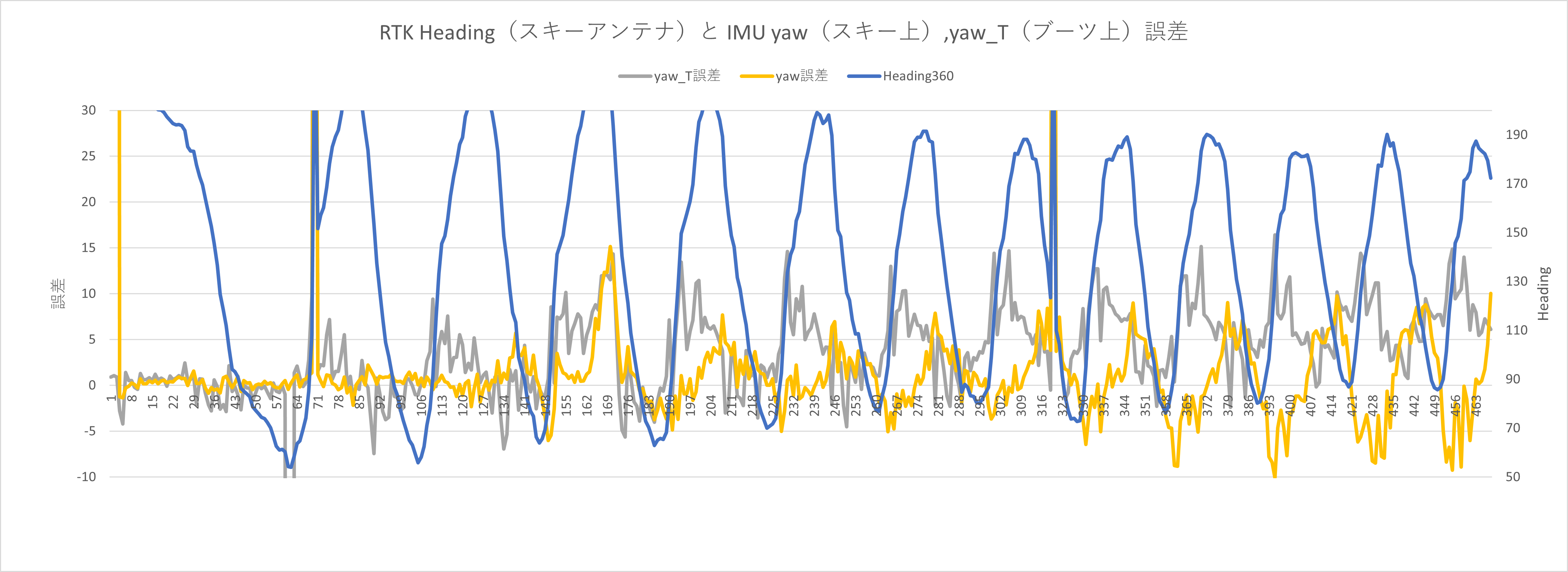
観察1:誤差のピークは、切り替え点を過ぎてターンの始動時に発生してます
=>IMUがFUSION処理しているので、加速度全体が急増した瞬間に影響されてyaw角が乱れるかと思います。
観察2:誤差の大小は、heading角の振幅によらず、時間経過とともに拡大している
=>IMUのドリフトの原理上そういう傾向がありますのでどこかでリセットしないといけません
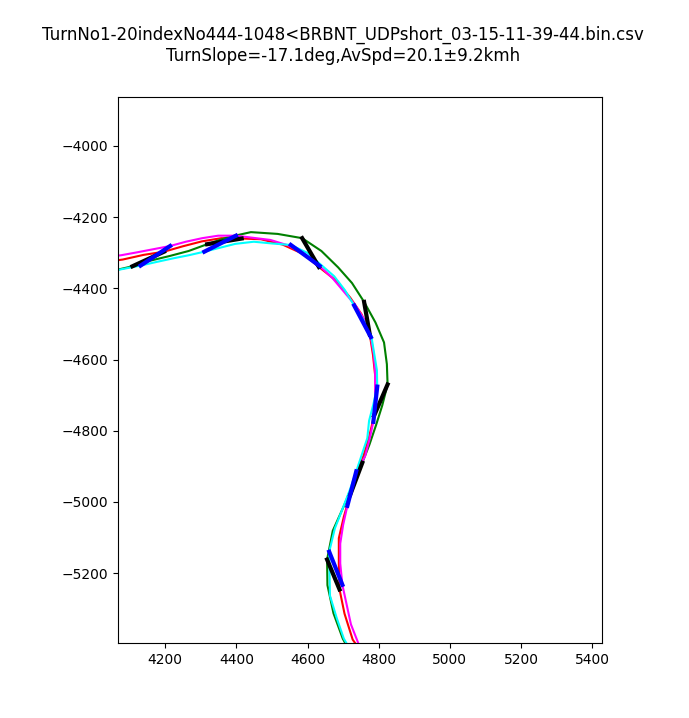
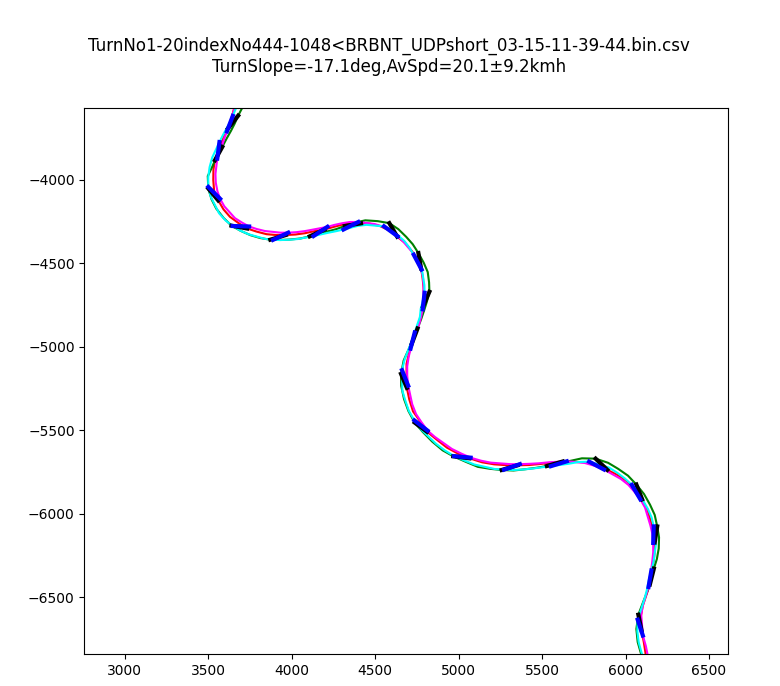
●yaw誤差のtrajectory線図でみる
上記データをTrajectry線図にしてみました。
黒がRTK heading角でのスキープロット
青がbootsOnのIMUyaw角
本来なら完全に平行にならないといけないのですが、結構ずれているのがyaw誤差となります
誤差が目立つのはターン始動とかターン中であることがわかります。
●以後
スキー左右の平行をみると、人間は角度の違いをシビアにみられるので、±1度でもわかってしまうかもしれません。そうなると、IMUのyaw角精度ではとてもスキーに使えないということになります。その点を実験しながら詰めていこうと思います。SkiOnのシステムでも使い勝手がよくなってきたので、精度が劣るBootsOnシスを無理やり使わないという選択もあるかなとも思ってます。
※測定周期の変更必要
IMUとRTKの同期処理が現在のサンプリング周期の違いで処理しにくくなっていて誤差になっているので
BootsOnの周期を100msecから120msecに修正して再度測定します。
10msecでの補間も同時にやってみて補間での同期修正もしてみます。