IMUは、yaw角不採用にしたので、Heading角はVCBLで精度をださないといけません。
VCBL堤防で歩いてみたのですが、アンテナが左右に揺動して、全然データが落ち着きませんでした。
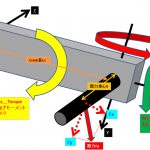
そこで、アンテナマウントを靴に固定するためのアルミステー板をつけて、マジックバンドで靴に巻き付ける
構造を追加しました。
●ステー作り
RTKを開発しているとアンテナの取り付け治具作成で、アルミ板を多用します。
アルミ板を所望のサイズにカットして、曲げるのは専用工具が必要です。ここでは、
カットに使うハンドニブラーと曲げに使うポケットベンダーを使いました。
過去記事に使い方あります。

他に、ネジ穴をあけて、タップを切りますので、ハンドドリルは、アマゾンのこれがいいです。
タップは、M3でハンドルで回します。

スキーブーツにぴったり固定するために、マジックバンドを挟み込んであります。

完成しました。結構しっかりして揺動は防止できてます。
午前中いっぱいかかりました。午后から実験です。

●試運転
地上高20cmだとどうもFIXが遅いしデータが安定しません。

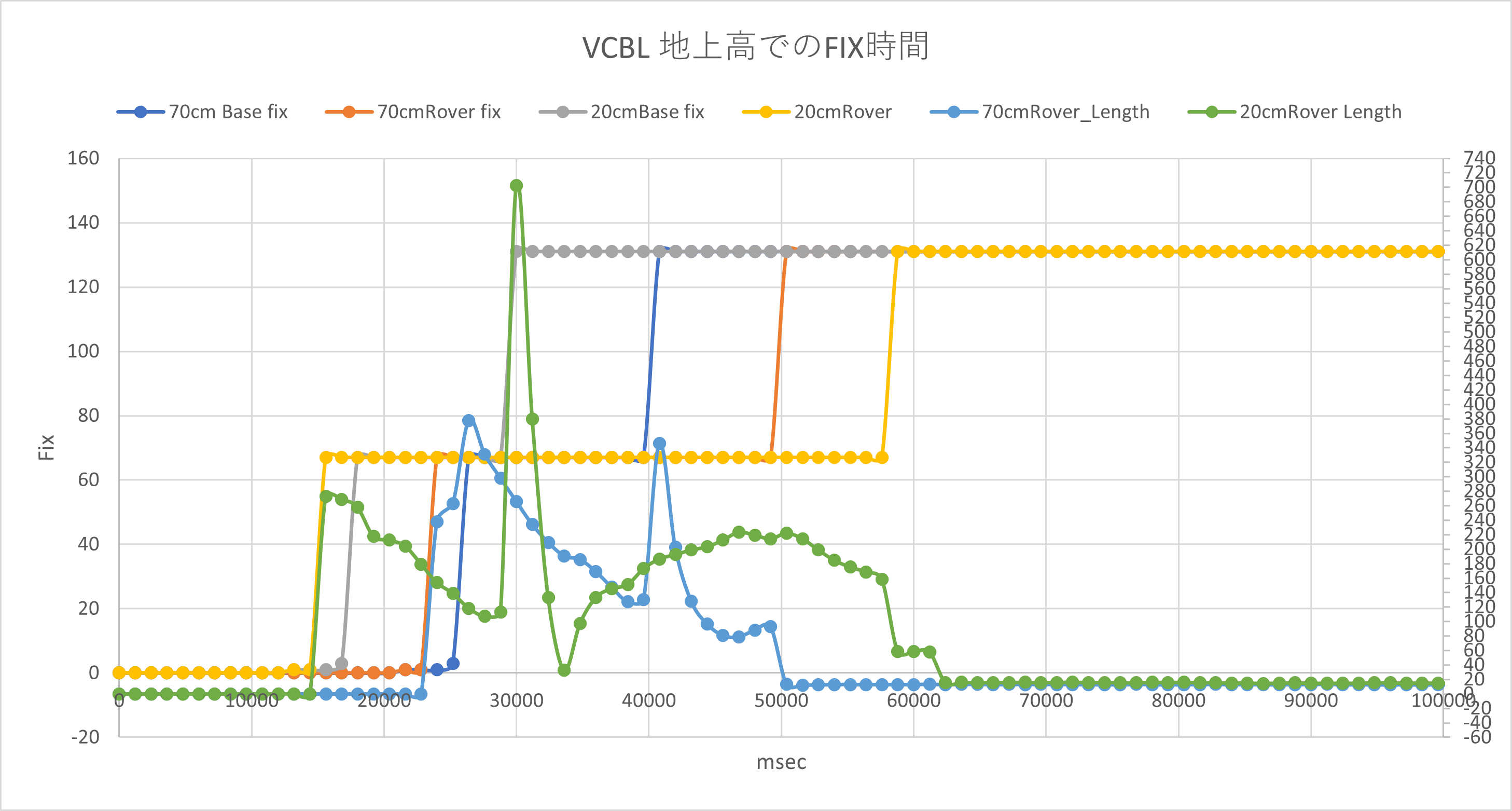
①RTKのFIX時間差を測定してみました。
結果1:20cm高さのRoverのFIXが遅くて、60秒超えてます。VCBLで尚且つ、地上高低く電波受信では悪い条件だとここまで悪くなるということです。
結果2:20cm高さのBaseのFixは、一番速かったです。これは、RoverのMovingBaseのRTK計算だけが、遅いということですので、VCBLは、RTK計算では、手間取るということだと思います。
結果3:70cmでもRoverが遅い傾向は同じで、VCBLがRTK計算が手間取るということです。
②Heading角静止ばらつき
70cmと20cmでのHeading角ばらつきですが、VCBLは3度以内という
規格なのですが、70cm3.7度、20cmで6度と悪い結果 です。
家の庭だと視界が悪いので、視界のよいところで、VCBLの実験をしないとダメだと分かりました。
| Heading度 | 70cm | 20cm |
| average | 205 | 191.8 |
| stdev | 1.245 | 2.079 |
| 3σ | 3.736 | 6.236 |
●以後
VCBLの実験は、庭ではできないことが分ったので、近場で視界の良い場所をさがします。
アンテナが進行方向に対して90度前後なので、アライメントを初期化して、進行方向のHEADING角を
決めておいて、VCBLの実験しないといけないので、アライメント治具を作成します。最終的には、アライメントモードをマイコンのプログラムに実装します。