家の庭で、アンテナが地面から10cm高さにあるせいか、歩行動作中FIX落ちが多発したので、見晴らしの良い川沿いの堤防で、歩行のデータをとって、様子をみてみました。
ログ方法;歩行動作では、BlueToothでデータ落ちが発生するので、SDログも同時にとって、BlueToothは、1秒おきにデータ受信するモニター扱いにしました。後でSDカードから読み取りましたが、いずれは、高速な無線転送をしないと実用的にならないので、STS24で実現していきます。


●測定項目
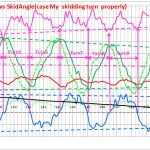
①1歩前後往復
できるだけ真っすぐ前に1歩進んで、そのまま後ろに1歩戻す動作を繰り返して、headMotとHeadingとIMU各種データを比較して、補正をかけられるか見るための測定。
庭で測定すると一歩の動作でもFix落ちが発生していたのですが、堤防上ではFIX落ち発生しませんでした。
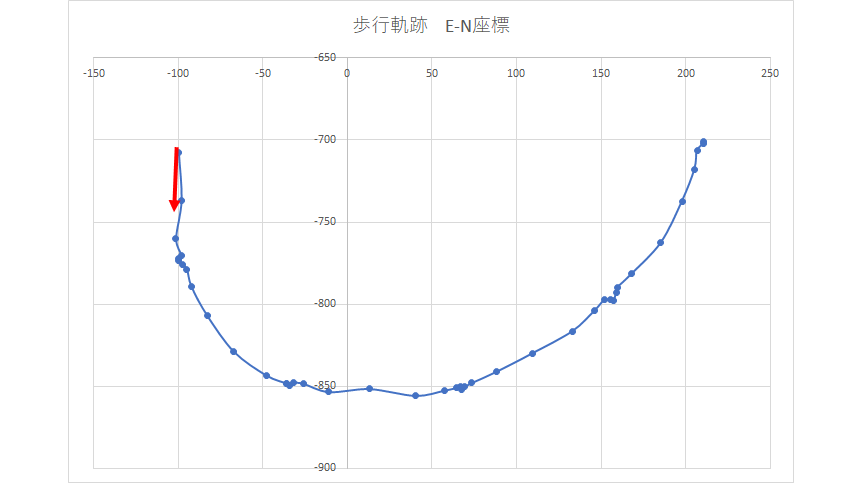
真っすぐに踏んでるつもりだったのですが、左右幅で12cmずれてしまいました。人間が真っすぐ歩く精度は
10cmレベルかもしれません。これでは、動作のばらつきなのか、ノイズのばらつきなのかわからないので、補正用のデータにならないので、1歩での補正方法は、地面にレールをおいて足をのせて真っすぐ滑らせる方法を検討します。
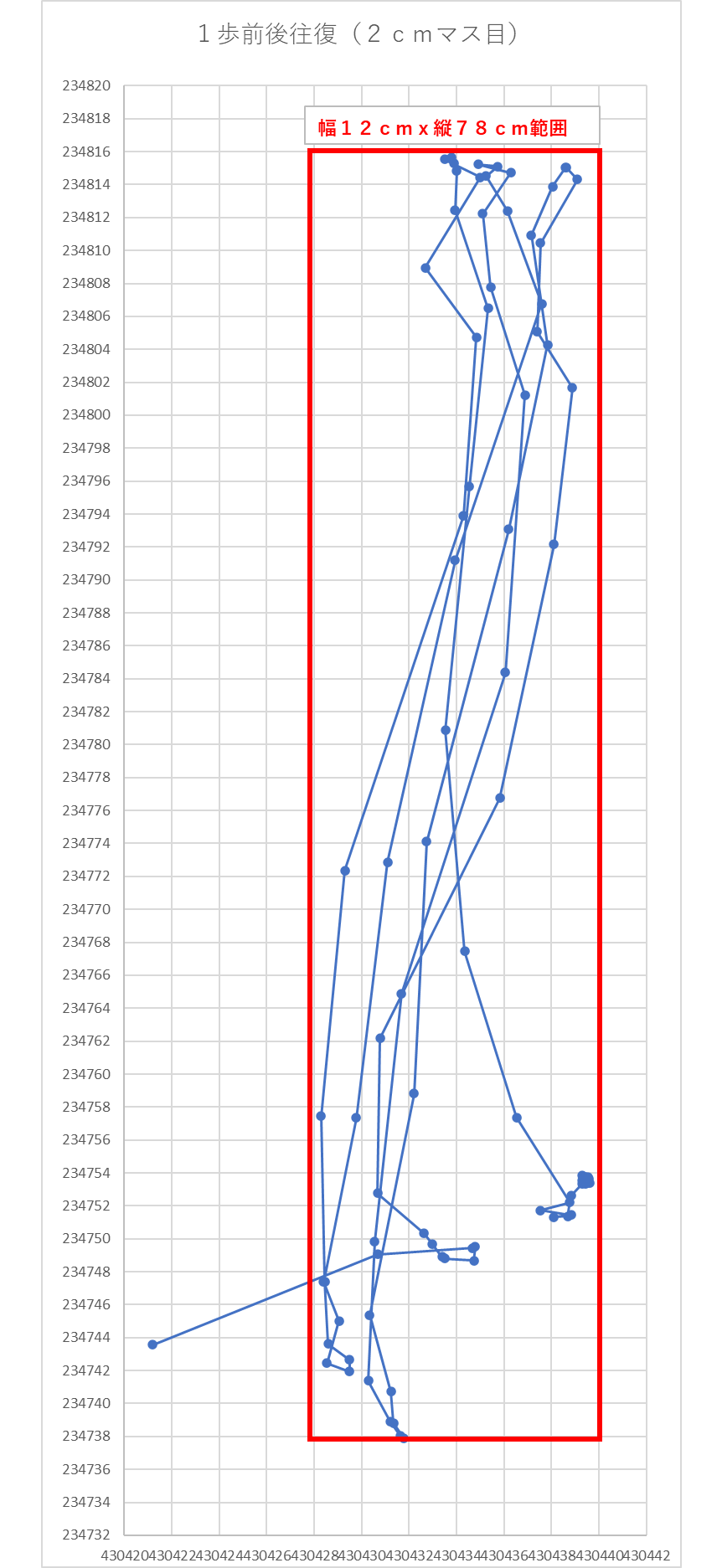
②歩行歩き回る
2-1)FIX落ち
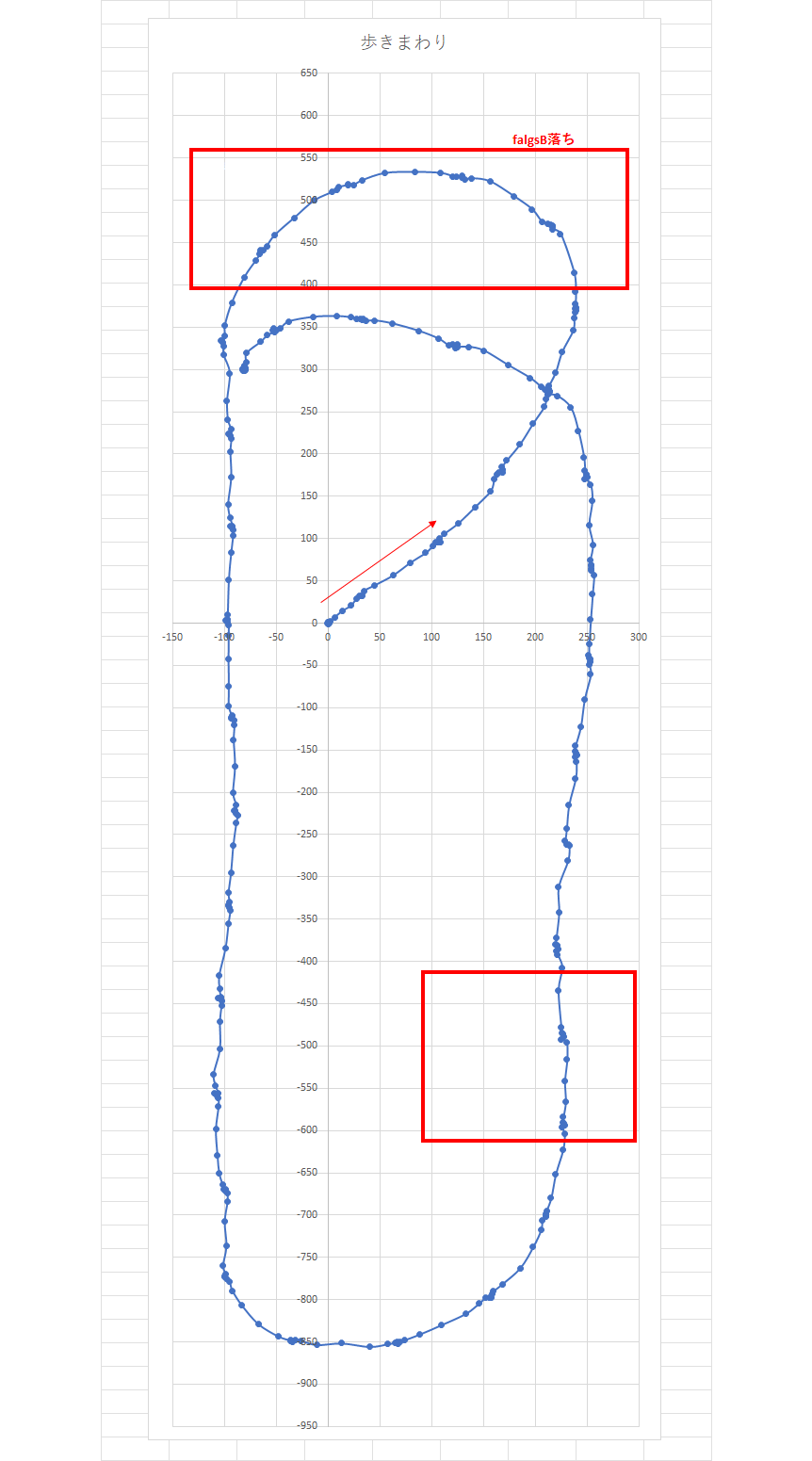
歩行では、FIX落ちが発生しました。速く動いている場合で、発生してますが、全箇所でなく一部個所だけ発生しているので、システムの配線まわりとかアンテナ線の揺動など疑わしい点があるので、更に、解析していきます。
2-2)IMU Gyro積分角とGravityからのpitch roll yaw計算とRTK Heading比較
BNO055を6軸で使っているので、Gravityからpitch rollは精度よく計算できます。
やり方は、WEB上でたくさん載ってますが、下記記事が判り易かったので感謝です。
https://garchiving.com/angle-from-acceleration/
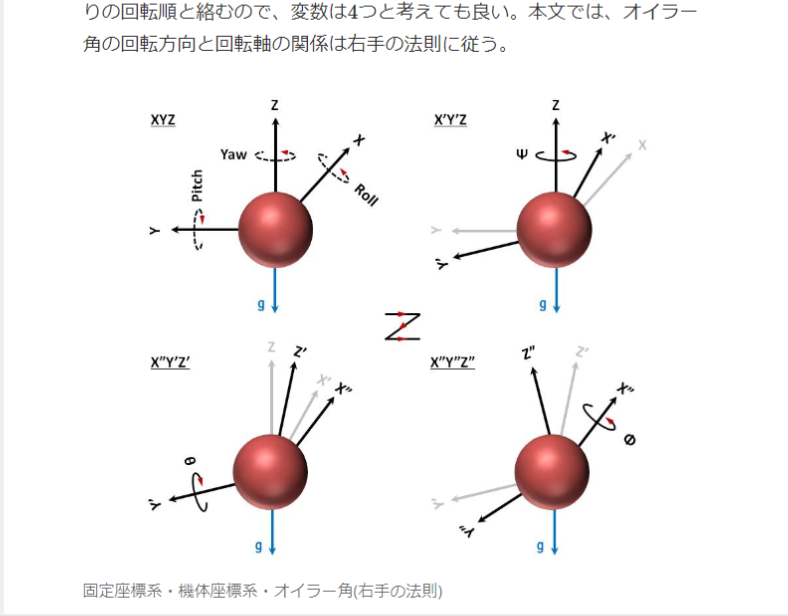
ax=grX,ay=grY,az=grZにすれば、比率なので単位関係なくΘyPitch ΘxRollのオイラー角でます。
IMUの姿勢とXYZの決め方でpitch rollが逆になる場合もあります。

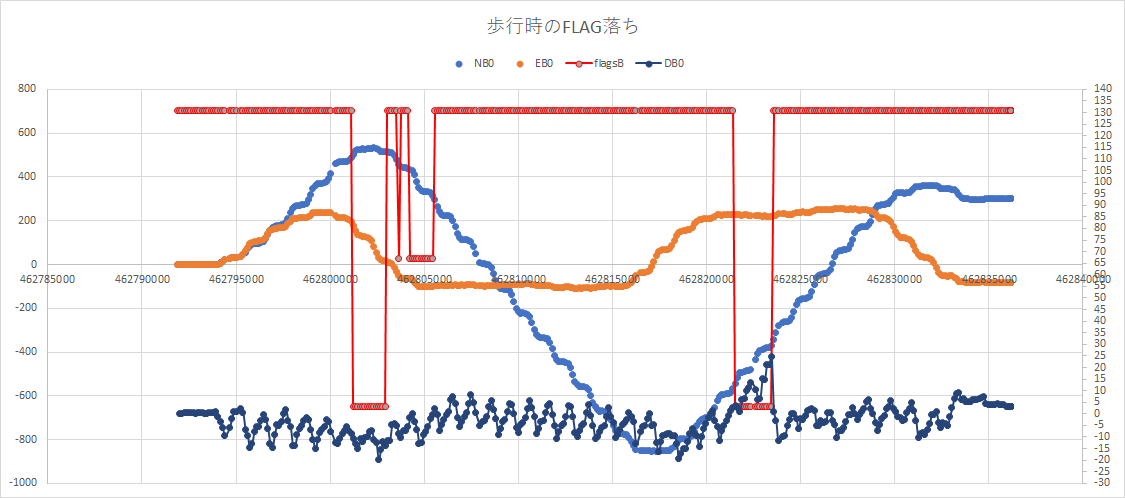
FIX落ちが無い正常な個所を切り取って、比較しました
ΘyPitch Θx RollとGYROを積分した値gsX,gsY,gsZ値とRTKのHeading(headMotとHeading)をプロット
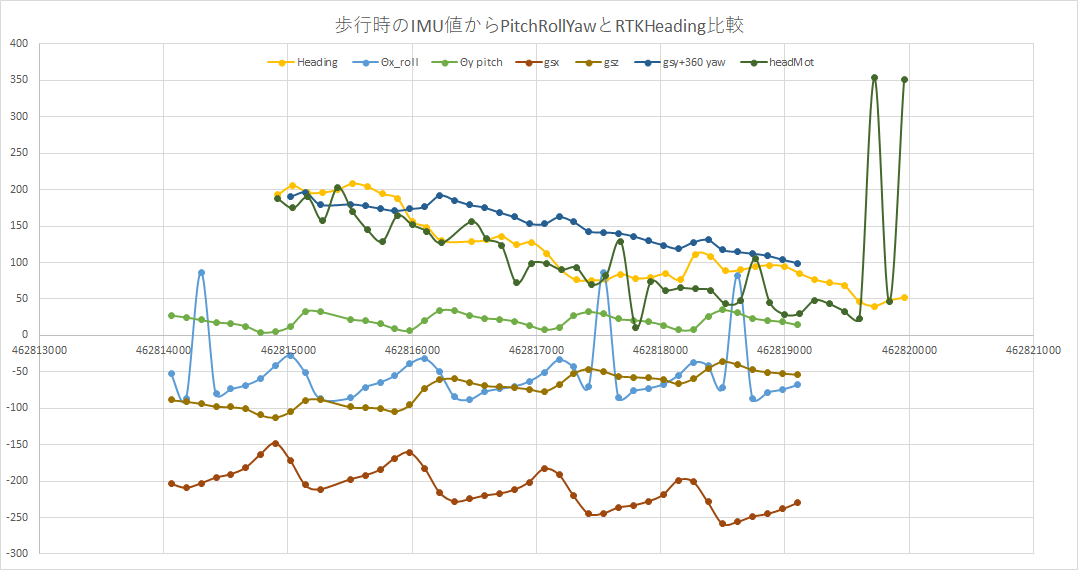
上記グラフを眺めてみると
結果1:Gravityから計算したΘyPitchとGyro積分角gsZと波形が似ています。
結果2:Gravityから計算したΘxRollとGyro積分角gsXと波形が似ています。
結果3:Gyro積分角gsY yaw近似とheadMotとHeading角の波形の傾向が似ています。
感想:IMUセンサボディの姿勢差なので重力加速度センサのGravityからとGyroセンサでも同じ値がでるはずですが
似た波形がでているので、Gyro積分角を地面固定座標変換すればぴったり合わせられる感触を得ました。
●センサ座標から地面固定座標でのpitch roll yawを得る計算
これは、IMUデータから都度回転行列を作って、Gyroの回転角から、yaw、pitch roll角がえられますが
pitch rollは、GravityからATAN計算だけで、精度よく得られますので、yaw角だけは、座標変換しないといけないので、回転行列計算をしてみます。
■回転行列判り易い解説記事がいくつかあって、SKY技術研究所様へ感謝です。
回転行列とは、 https://www.sky-engin.jp/blog/rotation-matrix/
オイラー角とは、https://www.sky-engin.jp/blog/eulerian-angles/
■オイラー角を得るための回転行列計算を判り易く解説されているページに感謝です。
https://www.kazetest.com/vcmemo/euler2rotationmatrix/euler2rotationmatrix.htm
■回転座標変換についての解説 丁寧です。
https://rikei-tawamure.com/entry/2019/11/04/184049
■図面が判り易かったのがこちら様です、IMU変換計算の学習は立体画像の理解が重要ですので、いかに判り易い絵をみるかにかかってます。
https://memo.soarcloud.com/6%E8%BB%B8imu%EF%BD%9E%E6%8B%A1%E5%BC%B5%E3%82%AB%E3%83%AB%E3%83%9E%E3%83%B3%E3%83%95%E3%82%A3%E3%83%AB%E3%82%BF/
■プログラムにするための計算
1:完結にまとめてあって感謝
2:QIITAの解説
https://qiita.com/take4eng/items/5609b1ee9473e5448aef
●以後
Gyro積分角から座標変換で、yaw角を得る方法と、内蔵FUSIONエンジンからのyaw角と精度比較してみます。
RTK Heading角で両者の優劣を決めます。