お盆過ぎて、信州長野市も朝夕が漸く庭に出て実験できる暑さになってきたので、懸案のVCBLの実装実験しました。

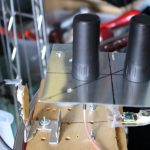
●レガース実装での回転実験
レガース台全体がぐるぐる回るように軸受けで支えられてます。手で回しながら方位を変えて静止状態でのVCBL Heading角とIMU Gyro積分角との比較をしました。
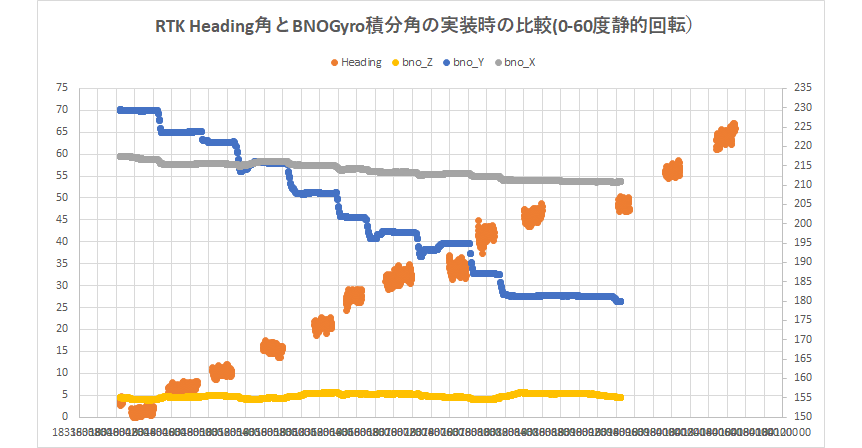
条件:真北に合わせて0度~60度までHeading角を見ながらだいたい5度刻みで回転させて、静止状態でばらつきを計測。
何故5度きざみかというと、VCBLの誤差が±3度あるので、5度の移動で区別がつくかどうかの確認です。
結果:グラフ
静止状態にもかかわらずVCBLのばらつきがレンジで5度くらい発生してます。IMUは1度以内です。
これは、今まで回転治具で測定したときの誤差3度より大きいので、実装でのアンテナ関係の4M変動影響だと思います。
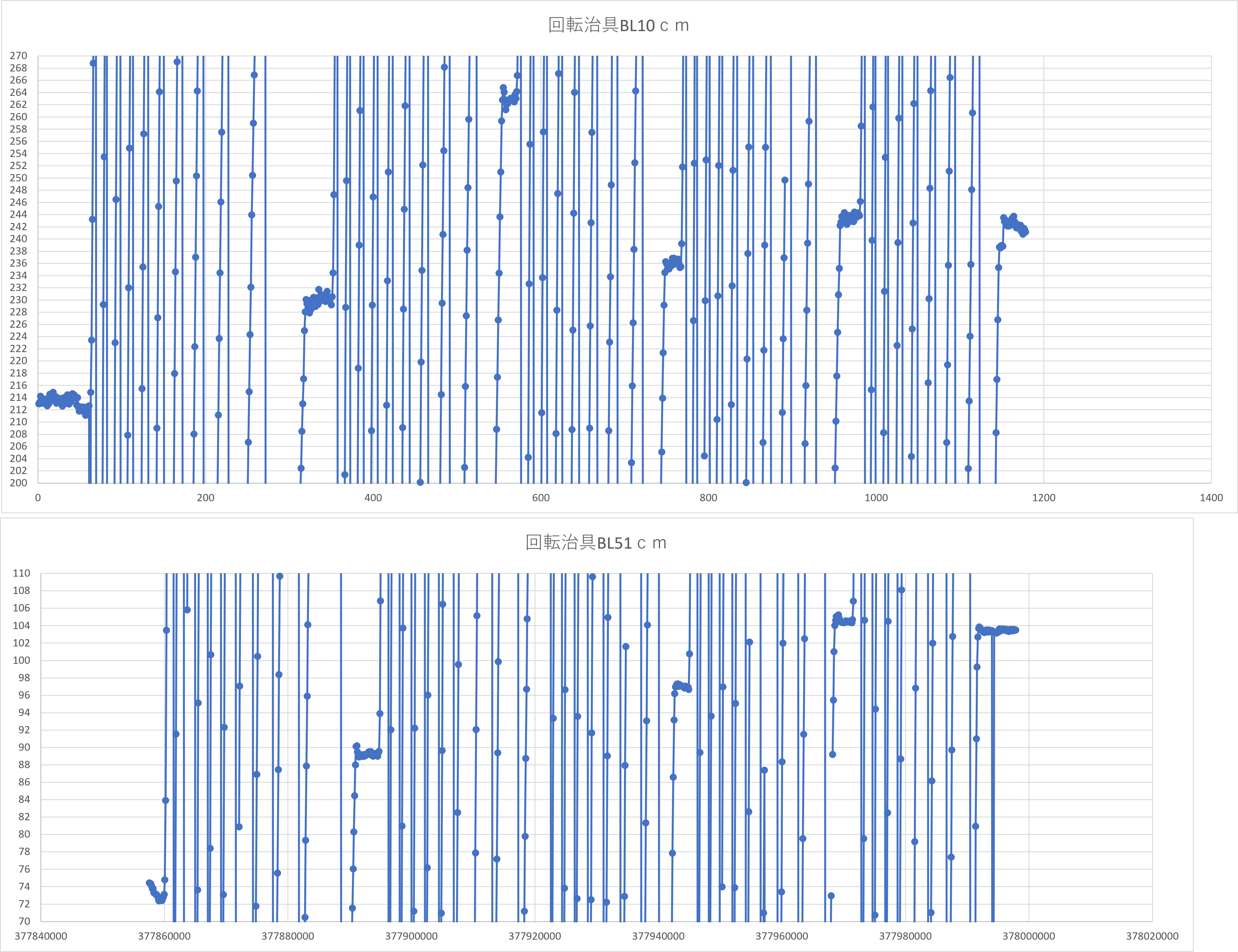
前回の回転治具でのVBCL基礎でのBL51cmとBL10cmでの静止部のばらつきをみてみると
回転治具BL10cmの場合静止状態でもレンジで3-4度ばらつきが定常的に発生してました。
下の回転治具BL51cmの場合の静止状態では、レンジで1度以内でばらつきが発生してました。
今までRTK Heading角の静止状態ばらつきを気にしていなかったのですが、2つのアンテナの
ポジションのばらつきを角度で拾うので角度だと誤差が目立つことが判りました。
しかし、誤差は、動的測定誤差の3σ以内に収まってますので、大勢に影響はありません。
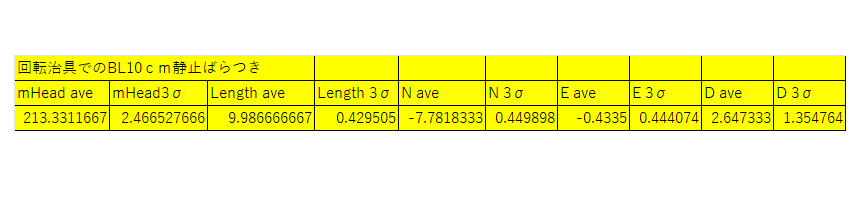
回転治具BL10cmでの静止状態の各パラメータのばらつきをみるとポジションの3σは0.5cm以内
Lengthも0.5cm以内なので、通常のRTK精度がでてます。
しかし、Heading角になると3σ 2.5度と大きくなります。これは、BaseとRoverの両方の位置ばらつきが
相対長さの精度を保ちながら回転しながらばらついている状態だと思います。BLが小さいので顕著にでるのは
VCBLの運命ですので、不可避のばらつきと理解しました。
●IMU Gyro積分角とRTK Heading角との比較
だいたい5度くらい手で回して静止させながら、0度付近から60度付近まで10水準測定して
Heading角とGyro積分角の直線回帰して回帰式でGyroデータからHeading角を計算した時との誤差を求めた。
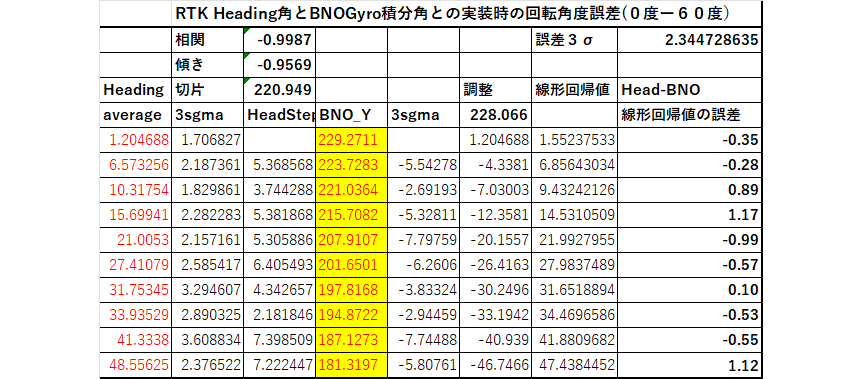
Gyro積分角の誤差は、3σ 2.3度で収まっていることが判りました。
一回転360度での3σが7度程度だったので、60度回転では2.3度は納得できます。
●実使用でのGyro積分角の使い方
Gyro角は、相対位置しかでないので、初期化時にRTKの方位角と合わせて補正する必要があります。
VCBLとの比較はHeading角そのもので補正してやればいいのですが、VCBL無しでの使い方の場合
BaseのPVTのheadMot角を基準に補正します。headMot角は、動作が始まらないと発生してこないので
直進運動をしている時に、headMot角とGyro積分角を補正してやる処理が必要です。
マイコンで処理するかPCで処理するか両方で検討してみます。リアルタイムで必要なので
マイコン出力前にできていれば、楽なので、マイコン処理から始めてみます。
●実装の課題
実験中、FIX全然できない状態が多発しました。レガースからレシーバーシステムを外して
アンテナ線をフリーにした状態で、揺動させると明らかにRTKが破綻します。
これは、過去3年間で散々体験したことですが、たまに戻してみるとアンテナ線の揺動は怖い
ことを思い出しました。
ですので、今回STA24で、胸にシステムを装着する方式は、アンテナ揺動リスクがあるので
STA23のレガースにシステム固定方式に戻って、実装を考え直してみます。
課題は、防水性とコンパクト性なので、STA23の携帯ケースへシステムを収納するのではなく専用の
カバー容器を作る方法でまずは、試作1発目はやってみようと思います。