調べてみると実験データの間を埋める補間のアルゴリズム無数にあるのですが、本テーマに対して何が良いのか判断がつきません。
そこで、補間の効果が最も出る運動を作って、それで、補間アルゴリズムの優劣を評価する方法を考えました。
●揺動リンク機構を追加した
回転治具で単調に回転させているだけなら、カーブフィッティングすれば、RTKデータも円になってしまうので、もっと複雑な運動で補間実験しないといけません。
手で往復動作させてみたのですが、いかんせん逆転のピークの方位角が何度か判りませんので
RTKとIMUのどちらが正しい値か判別できません。
そこで、往復運動で逆転するピークが管理された運動をリンク機構で作ることにしました。
私の20代のころは、機構設計をやっていたので、リンクとかカム機構は懐かしいです。
1980年代からメカトロ時代になって、ステップモーターとセンサをいじることが多くなって、複雑な機構設計はしなくなりました。
いろいろ検索してみるとまとまって機構を解説していて判り易いのは、何とMISUMIのサイトでした。機構と部品の解説がありました。からくり治具の素
その中で、欲しいのは、揺動と回転で
https://jp.misumi-ec.com/tech-info/categories/machine_design/md01/c1135.html

実にシンプルなリンクですが、これで1回転で1往復する揺動機構ができます。
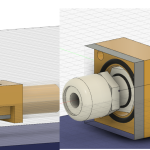
●リンク機構製作
計算して設計しても、手作りで寸法も部材も適当なので、時間の無駄なので、手元にある材料で
作りながら現合調整して組み立てました。2日でつくれました。
回転治具の下に台となる角材を敷いて、その上に回転軸受けを固定して連結リンクを回転治具のリムにつけたネジ台座にボルト止めしました。全部板材と角材とネジ類、回転軸だけは、ベアリングを使ってます。

回転治具は、60度程度を往復リムには軸受けでなく、ボルトナットを軸受けとして使ってます
ネジが往復するだけなので、ゆるみはありませんし、上下動は0.3mm程度で無視できます。
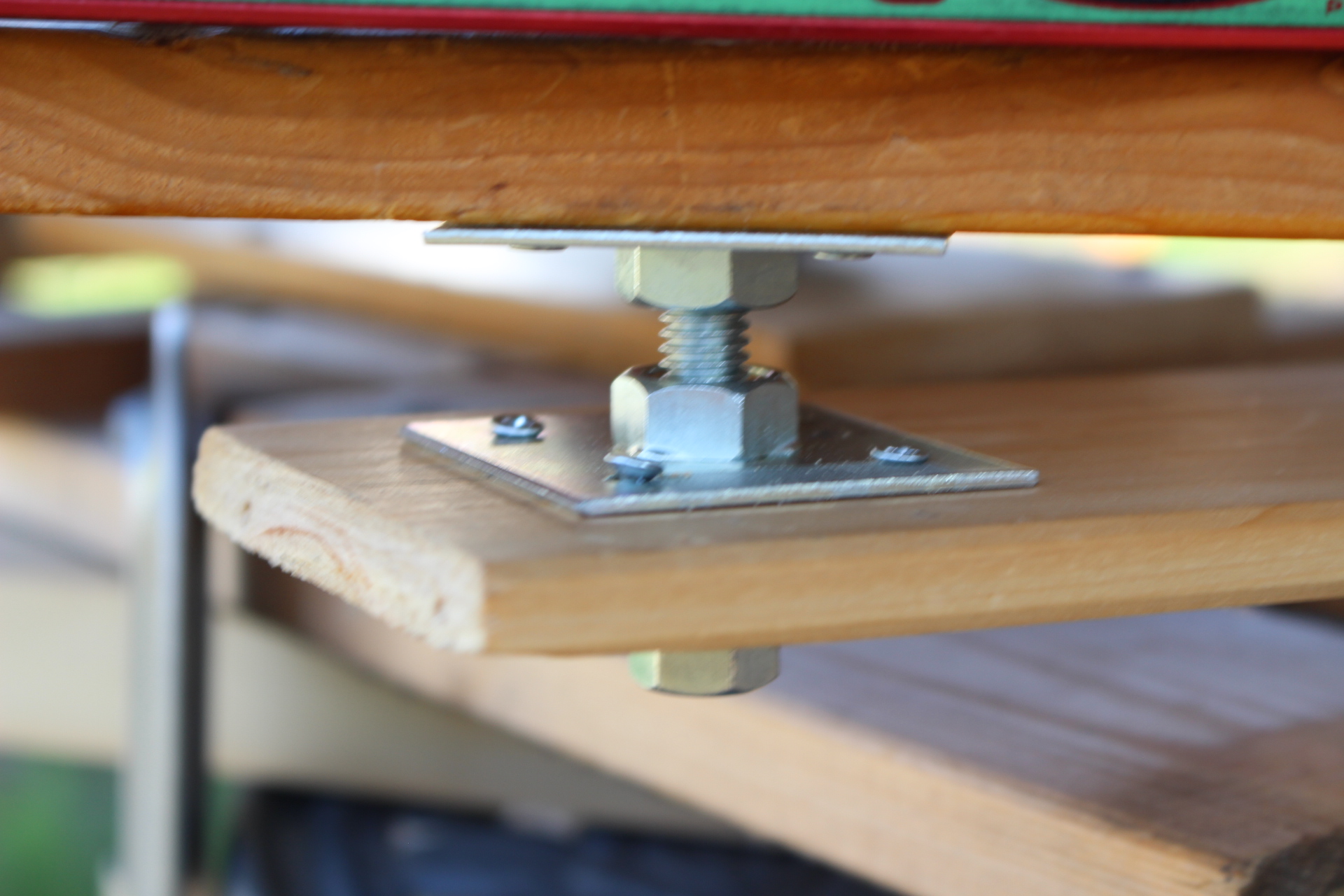
回転リンクと回転軸はさすがにぐるぐる回るのでベアリングで固定しました。

●動作確認
①リンクの縮んだ状態
この時の方位角(Roverのheading角)15.46度±0.36度でした。

②リンクが伸びきった状態
この時のheading角が77.14度±0.44度

15度から77度までの往復運動をする機構ができました。
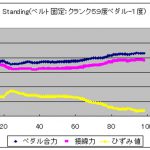
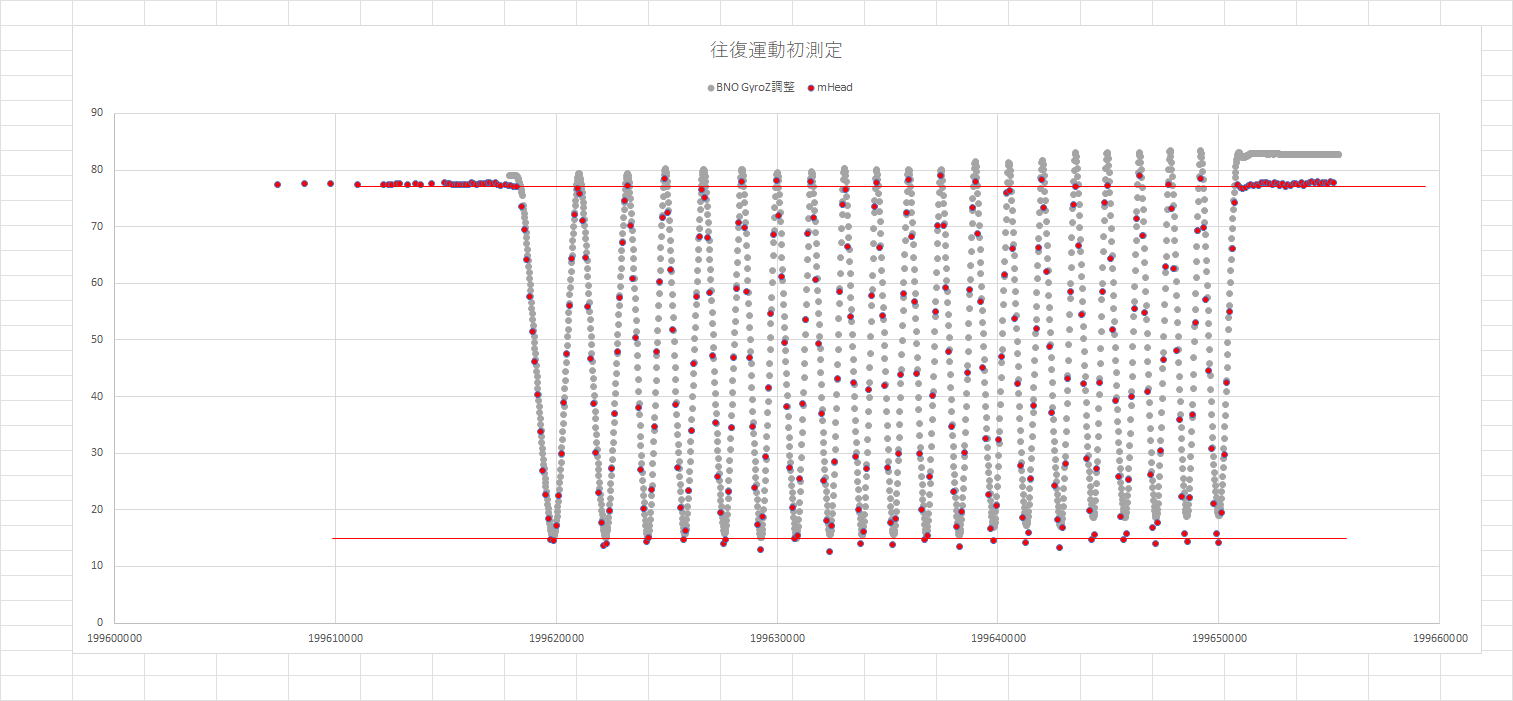
●初回の測定結果
連続してクランクのベアリング手で回して連続した往復運動で測定しました。
赤い線が77度と15度のラインです。
heading角が1-2度超えてますが、逆転の慣性で超えているとおもいます。定常回転では
衝撃が加わらないのですが、往復運動だと慣性力でテーブルが揺れるので、もっとしっかりしたテーブルで実験しないといけませんでした。
①BNOのGyroZの積分値ですが、次第にドリフトしてきてます。
②RTKのheading角では、ピーク値を超えた値とか不足した値がでていてピークをとらえていません。
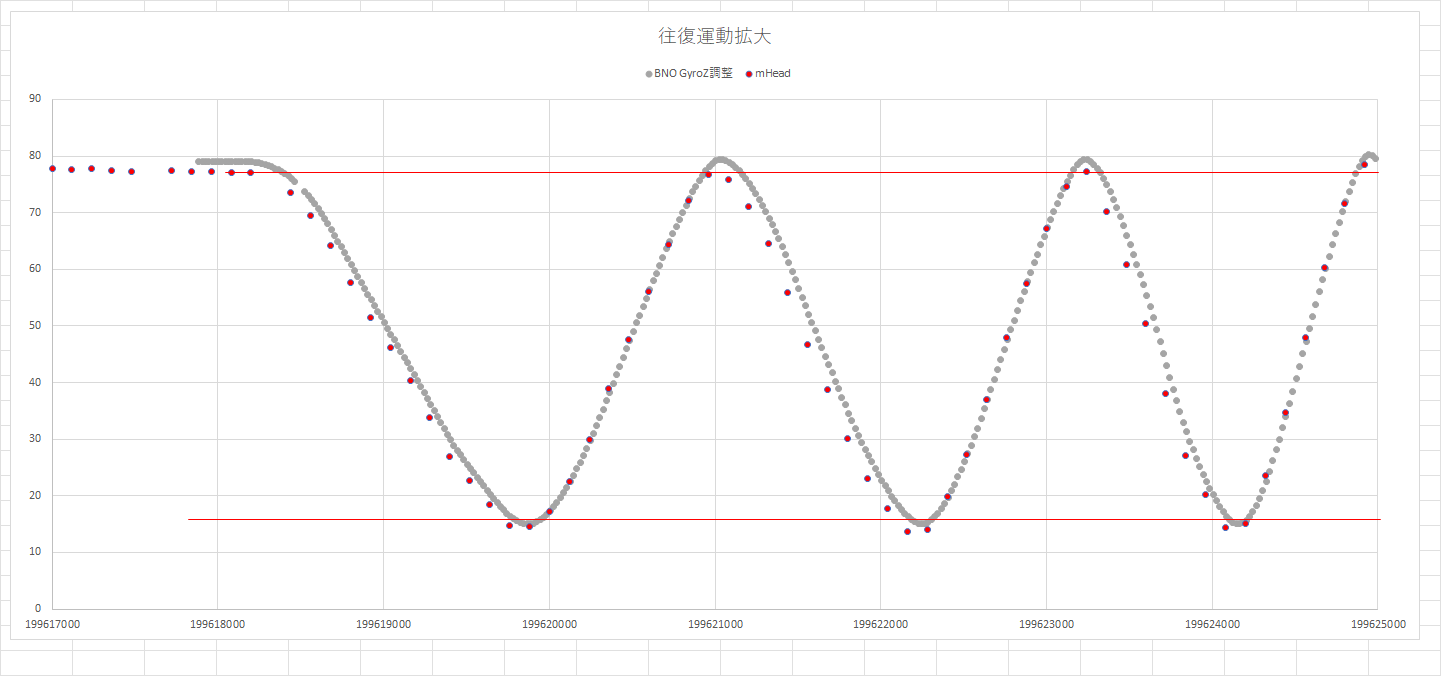
拡大してみると
①BNOのgyroはピークをとらえていますが、ピークの値が超えてます。
②RTKは、とびとびでピークをとらえてません。
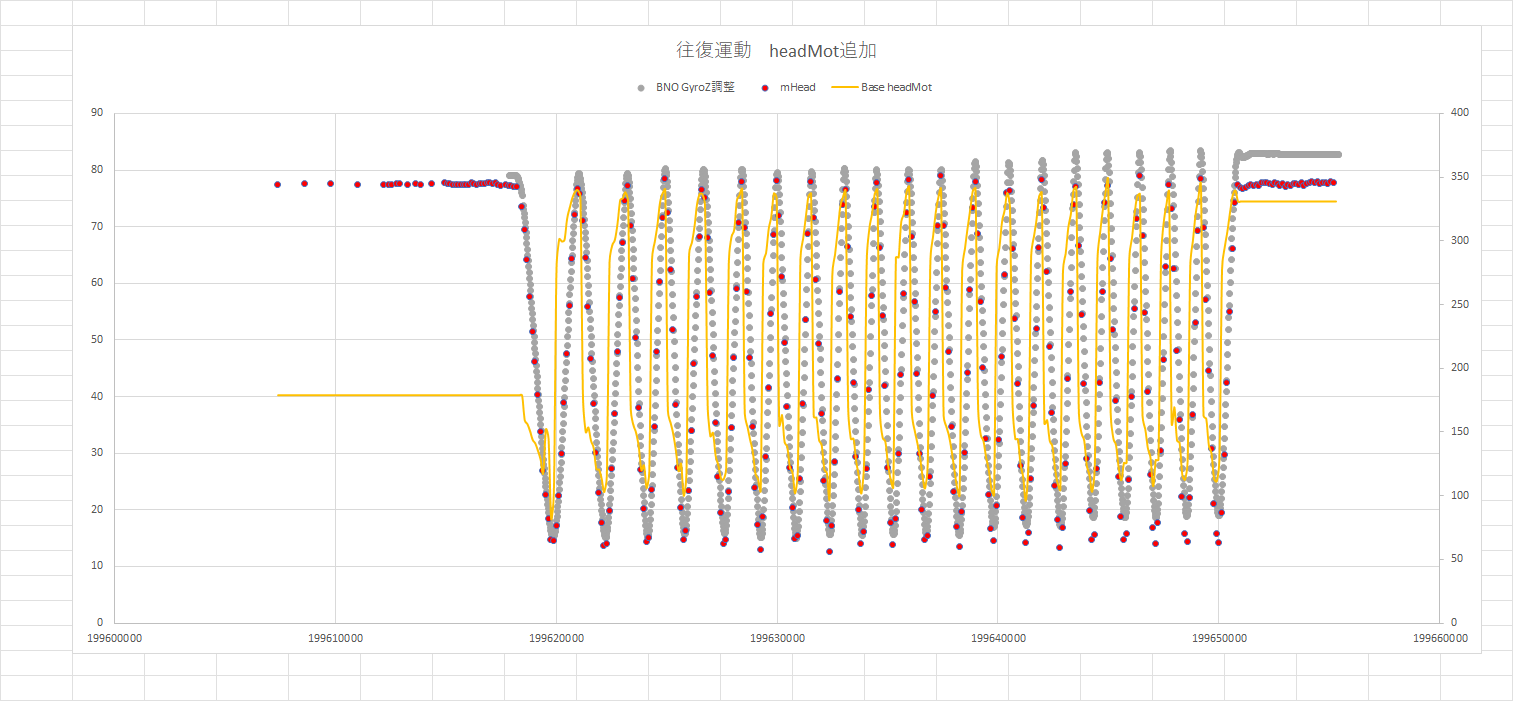
③headMotを追加してみてみた。
headMotは、速度ベクトルの方位角なので、リンクの直角方向にでてくると思っていたのですが、何と全然違ってました。幅が100度から300度まで200度くらい変動してます。
スキー測定でのheadMotは、進行方向を忠実にあらわしていたのですが、揺動運動で、急激な運動となると全然違った値がでてきました。以後、headMotの値がどうしてこうなるか追及していきます。
●以後
補間方法を試しながら往復運動で、評価をしていきます。
IMU側の他のパラメータも往復運動でどうなるかを調べて理解を深めます。