BNO055のGYROデータがそこそこの精度と再現性があることが確認できたので、
本格的にRTKシステムでGyroデータを使ってプRTKデータを補間する検討を始めてます。
●RTK120msecは遅すぎる。
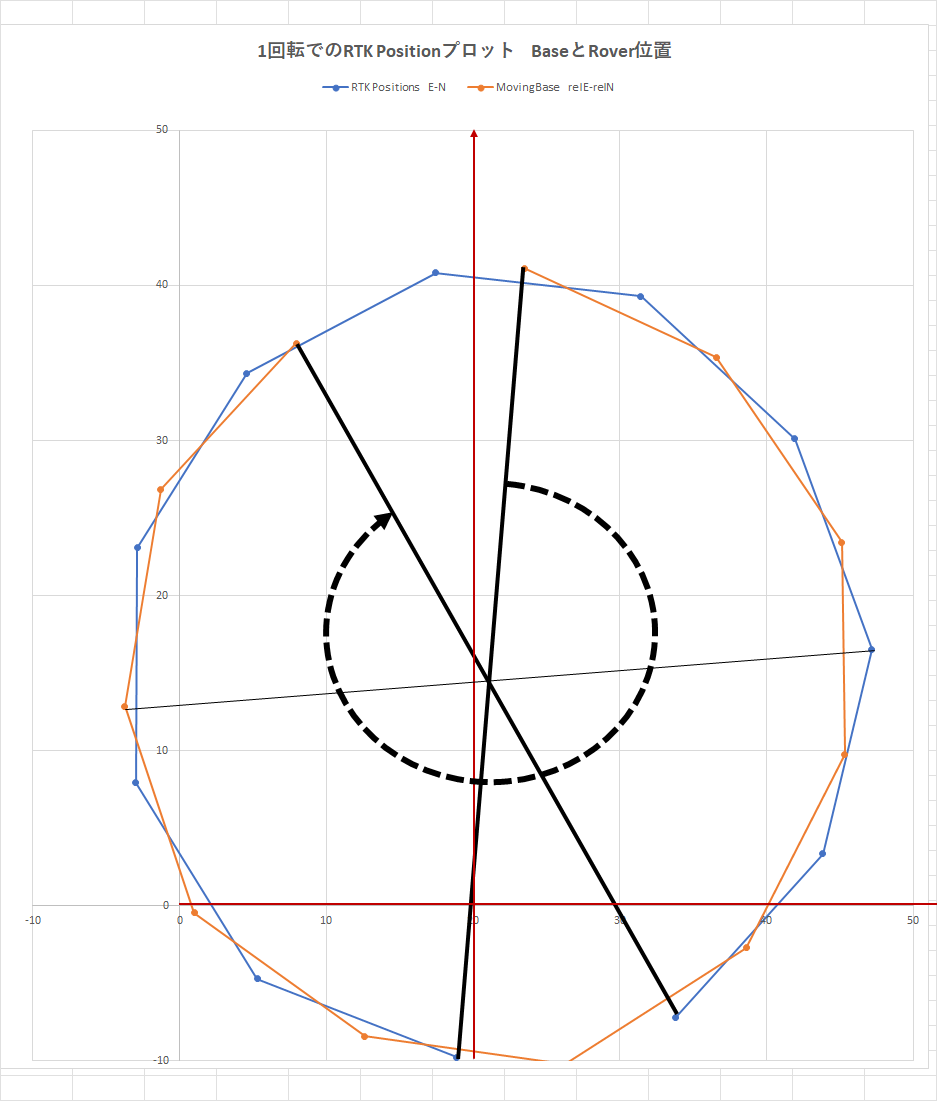
下図は、RTK MovingBase回転治具測定でのBaseとRoverの軌跡です。BaseLine長51cmです。
この1回転が1.2秒ですので、平均時速4.7kmhと歩いている程度の速度ですが、
円運動が多角形のごつごつした形状になってしまってます。1点1点の座標位置精度は、±1cm前後の精度なのですが、いかんせん、測定周期が120msec(8.3Hz)と滅茶苦茶遅いのが玉にきずです。
円運動の軌跡がでないので、例えば手足にアンテナをつけ、運動してみてもどのように手足を動かしたかは
わからなくなってしまいます。スキーや自動車などの大きな回転半径で遅い角速度での運動なら軌跡は見られますが、人間の手足の動きのような角速度が速く、回転半径の数十cmの円運動では、RTKの遅い周期では無理です。
●IMUでの補間
メリット1:周期が速い
メリット2:デバイスサイズが小さい
メリット3:3次元の姿勢角が得られる 特に重力の分力を使うpitch rollは精度よくでる
デメリット1:加速度を2回積分して距離をだしても、精度が悪くて使えない
デメリット2:磁気センサは、キャリブレーションをケースバイケースで入れないとyaw角精度がでない。
デメリット3:外乱が多いとフィルターの影響でデータのばらつきが大きくなる。
●GYROデータでHeadingデータ補間
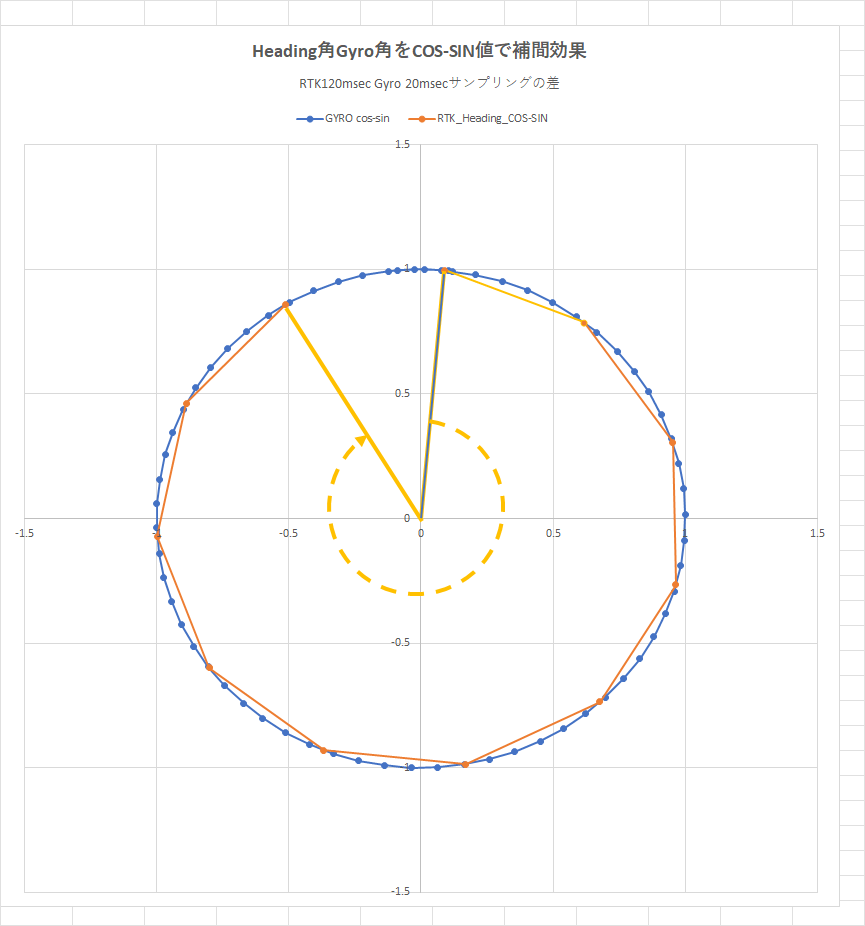
時系列グラフでは、差しか見えないので、円の形状のグラフにするために、回転角をSIN COSに換算して、円弧をプロットしました。
上記のRTK Base-Roverの回転と同じ回転時でのデータです。
Heading角のプロットだと粗い多角形にしかなりませんが、BNOのGYRO角速度を積分したプロットで50Hzサンプリングしたデータをプロットすると補間の効果が見えると思います。
Gyroデータを積分して、Heading角の補間をすれば、運動の詳細を見ることが可能になることがわかります。
●以後
Heading角でをGyro角速度積分で補間できることが分かったのですが、RTKの位置を補間するのは、加速度データの2積分の壁があるので、永遠にできない運命ですが、RTKの位置を参照しながら、何とかIMUデータでの位置補間ができないか、アイデアを練ってみます。
現在は、回転治具ですが、自転車に乗せて、実際にHeading角の補間をしてみようと思います。
スキーは、サマースキーでできるか検討します。