※2024年3月1日追記 本記事は、2023年3月19日の記事ですが、当時はBNO055を使用していましたが、BNO055は、ファームウエアに致命的なバグあって、キャリブレーションが不用意に働いて、データを壊してしまう現象が多発することがわかりました。時々yawデータが10度以上オフセットしてしまう現象がそれです。
2023年11月からBNo055捨ててファーム改良品のBNO085を採用することで、ファームウエアのバグが無くなってようやく普通の低価格IMUのスペック(3σ±5度)が得られるようになりました。BNO085の記事はこちら。2024年3月1日時点での最新データでは、RTKの方向角で補正することで高精度化の可能性がでてます。
とりあえず、BNOとRTKで波形が似ているデータとれたので、メモしておきます。
逆に全く違うデータもでているので、BNO055のYAW精度調査していきます。
その1:【STA23】BNO055yaw角とRTK Heading角の比較その1<回転治具で基礎実験>
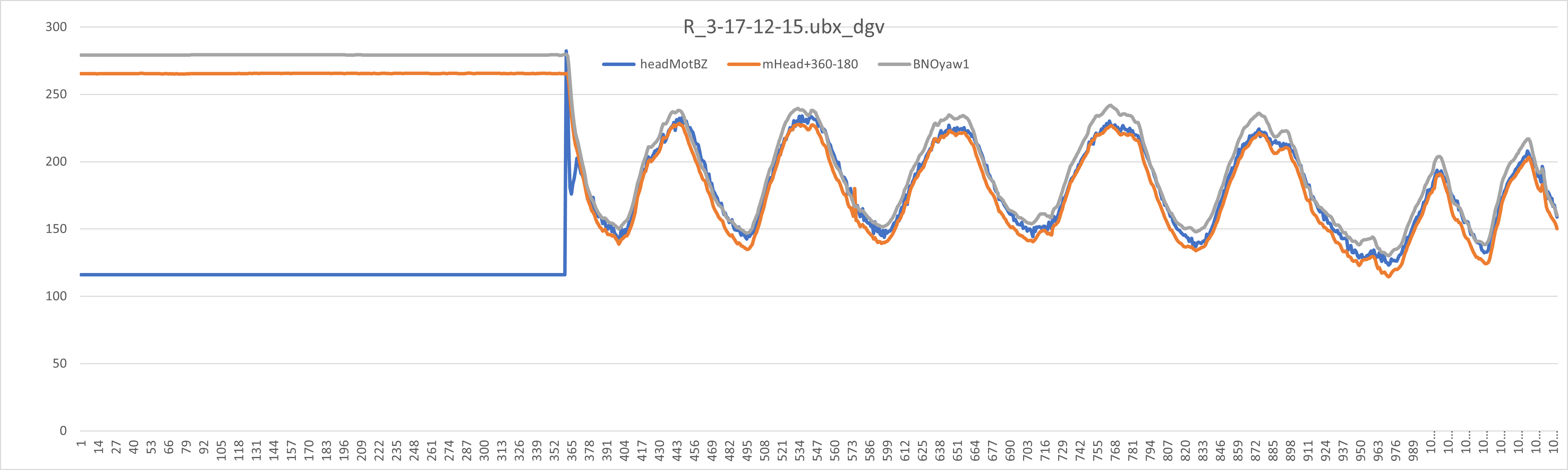
●右スキーに仕込んだBNOがスキー板のHEADING角と似た波形になってました。
N=9本滑って、すべて同じ傾向なので、データとして採用してもいいと思います。
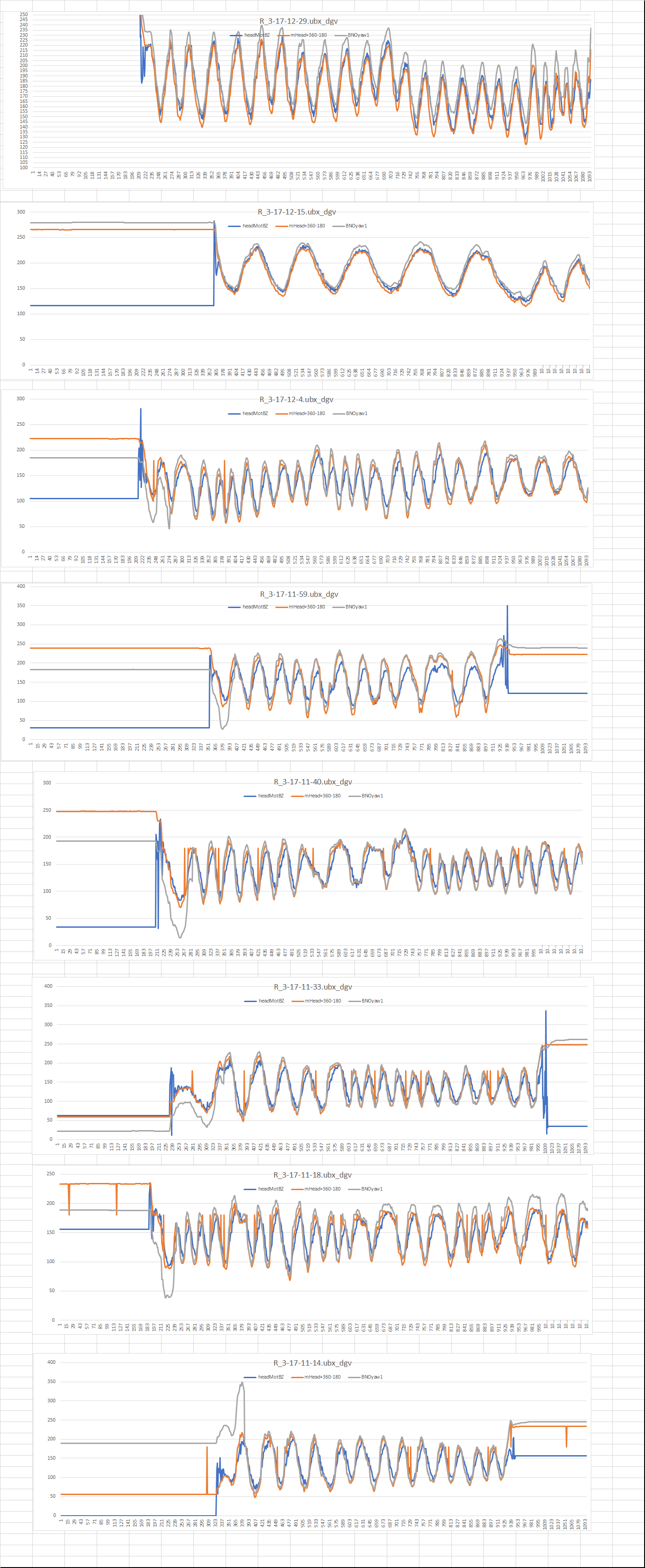
グラフの内容:
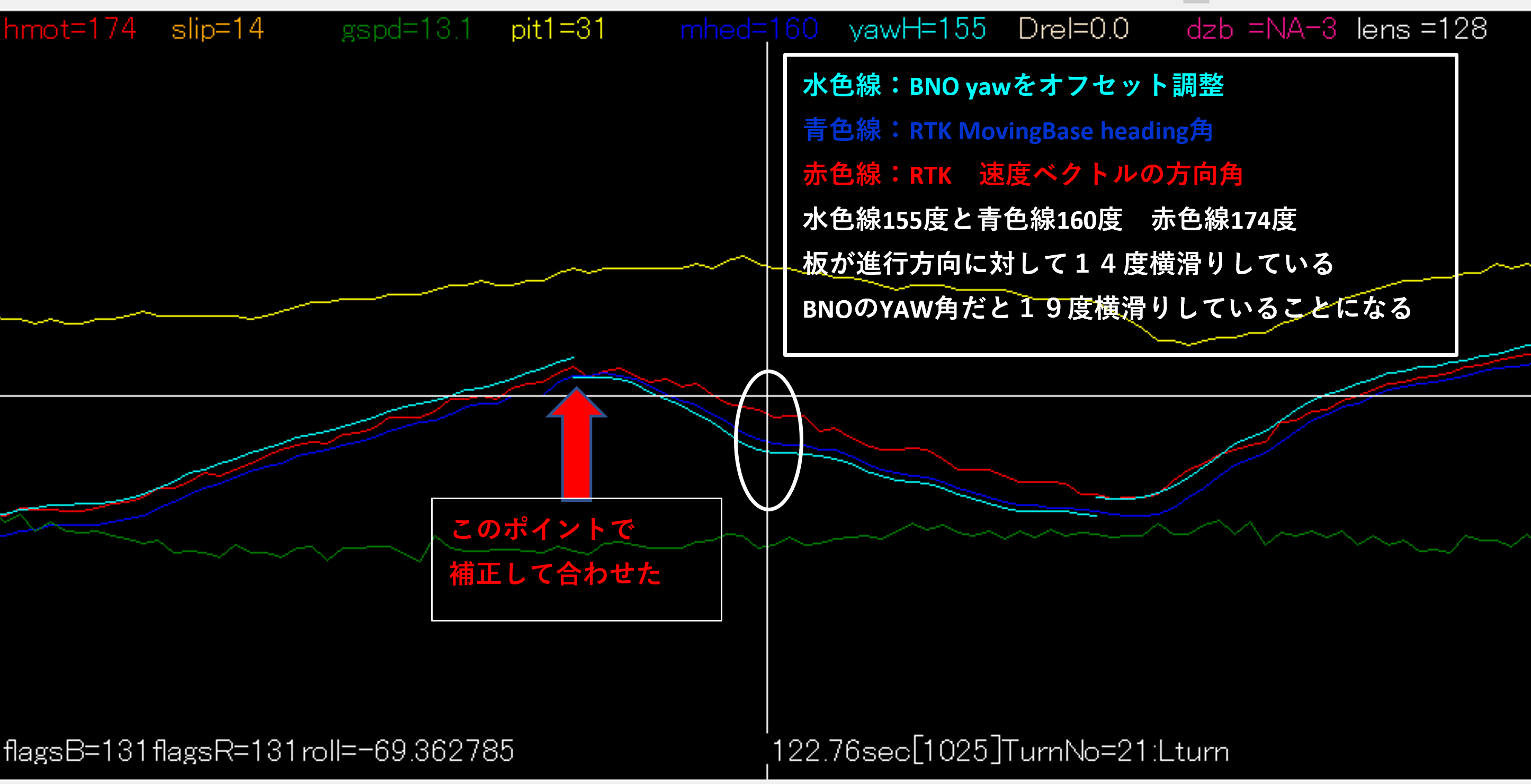
①青線が,RTKでの速度ベクトルの方向です。GPSドップラーを使っているので精度はいいですが、
時速20kmh以下だと精度がおちます。今回は、ぎりぎり20kmh程度です。
②茶線が、スキー板のHEADING角を示します。前後に1.2m間隔でアンテナを設置してあって
その間の3次元の相対変位を0.1mm分解能で測定しているので、誤差としては、±1度未満がでてます。
③青線ー茶線の差がスキーの横滑り角で、用語としては、ズラシ、ズレと呼ばれる現象です。
灰色線のBNOのYAW角は茶線と一致すれば、精度が良いことになります。
この茶線が、基準となって、BNOのYAW角を評価します。
④灰色線が、BNOのYAW角です。Quarternionからオイラー角に算出したものです。
9本分のグラフをご覧ください。
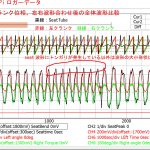
⑤最もよく合っていると見える、上から2番目のR-3-17-12-15のデータを処理してみた
板と速度ベクトル角度が一致するピークの点で、オフセット分をプログラムで補正処理しました。結果が下図です。
RTKHeading角とBNOとの差が大きい5度差発生している個所を発見しました。オフセット補正すれば完璧に合うと思っていたのですが、別の要因があるみたいです。この解析はその1で、やってますので、ご覧ください。
BNOとRTK Headingの基礎評価をしながら、別の要因をさぐっていきます。
●逆に左足のBNOは、全然違う結果で、全然あってません。振幅が2倍もでています。
この違いをその1以降で解明していきます。