
※2024年初夏 ubloxはRTK事業で失敗したようです、ZED-F9Pは製造中止になるかもしれません。
=>心配なので、Ardusimple社に問い合わせたら、ZED-F9Pはあと5年以上供給するとの回答を得たので一安心しました。
【RTK】Ublox異変=>F9P終わって、NEO-F9Pに移行L1-L5のみ<事業存続の危機か>
読者の皆さんに問いかけたいのは、あなたの行動は、コト作りを前提としたモノ作りになってますか? です。
STA22のRTKの状況をログして、後から精度などの状況を確認する機能を追加します。
RTKの精度解析は、ucenterでは無理で、RTKLIBならGNSSデータの汎用処理機能が豊富なので精度解析ができます。RTKLIB専門的で、難しいので、ここ2年避けてきたのですが、結局学習しないといけなくなりました。
※2024年8月 「ジリ貧のRTK分野を救わないと」
①市場が小さい=>ublox社がNEO-F9Pというチップ発表したのですが、ZED-F9Pと何も変わってません。何故こんなことをしたのかubloxのHP調べてみたら、ここ7年でGNSSチップ事業が右肩下がりで、ジリ貧状態でした。2018年から第9世代のGNSSを出荷したのですがこれが全然売れてません。F9Pが期待はずれだったようです。使い方が難しいのと価格高い、遅いとユーザーにとっては、課題があるチップですので、私のような特定ユーザーしか使いません。更に、アプリケーションが建設、農業で、肝心の自動車には搭載されてないのが致命的です。私もF9Pを自動車に載せて測定してみましたが、トンネルとか谷間で全然ダメで、一度FIXからFloatになるとしばらく回復しないので、その間データが不良のままでいます。普通のGPSより回復に時間がかかるのが欠点です。RTKのアルゴリズム上、floatになると再FIXさせるのに、移動している状態だと厳しいということです。自動車メーカーも評価してダメ出ししたのだと思います。
②ユーザーが育たない=>RTKチップに興味があるユーザーは、GNSS自体に興味のある人が多くF9Pのターゲットであるリアルタイムキネティクス(物の動きを測定)することを目的としている人が少ない。F9PのForumで人気があるのは、PostProcessingつまり、F9Pからrawデータでログして、後でRTK計算をして解析するというRTKとはかけ離れた使い方をするユーザーが多いという点です。そんな使い方は、F9Pの高速RTK演算アルゴリズムを無駄にしているので、価格の60%を使ってない使い方です。そういう使い方をするユーザーが多いので、市場はジリ貧になるのは、当然です。私のブログの主張である。コト作りを起源を発したモノづくりから外れている行為なので、原理上そういう活動をしているかぎりは、その分野は、発展せずに、衰退していきます。望むらくは、RTKの本来の目的であるモノ動きを精密に測定できるアプリケーションを開発するユーザーが増えないと市場は、伸びないどころか、そのうちRTKチップが撤退して、入手できなくなってしまいます。
③コト作りが重要=>多分、本記事を検索で探して来訪されている方は、GNSS自体に興味のある方で、アプリケーションに興味がない方だと存じます。それでは、RTK分野の裾野が広がらないので、RTKを研究していても、誰も評価してくれないし、研究投資も入らない、ジリ貧研究分野になってしまうことを認識していただきたいと思います。要するに、コト作り(何をどうするコト)を決めてから、モノ作り(技術開発活動)をしないと物ごとは発展しないという原理原則を重視した研究開発活動をしないといけないということです。日本の産業が欧米に負けてきたのは、コト作りから出発してない研究開発をしてきたからです。
●RTK精度に関する学習LINK
0)RTK計算の基礎 防衛大学校の公開資料
「RTK GPSの原理と応用」
http://www.nda.ac.jp/~nami/research/pdf/CGSIC2001.pdf
・RTKの計算内容を詳細に説明してある
=>理解したこと:二重位相差の連立方程式を測定データ数だけ行列にした縦長の行列からMoorePenroseの一般化逆行列計算をして、結果として多数の連立方程式の解の最も近い値を最小二乗法の解を得ます。最小二乗法は正規分布を前提とした計算です。ばらつきは正規分布として計算してますので、RTKの解は正規分布の統計値としてでてきます。一般の計測器だとオシロスコープなら時系列物理データそのもの、FFTアナライザなら物理値の統計計算値がでますので、RTKは、FFTと同様に統計値を出力してきますが、平均値とばらつきも出力しますが、そのばらつき値は、1シグマ相当の信頼性のものですので、実際に信頼性あるばらつき値は、3倍した値をばらつき(3シグマ)を採用することで、99.7%の信頼性を確保できる点が注意です。F9Pのばらつき値hAccなどは、1シグマであって、3倍すれば、信頼性が担保できる値となります。通常のセンシングでは、ばらつき値まで出力してくれるセンサはないのですが、RTKチップは、平均値とばらつき、信頼性各パラメータまで出力してくれますので、その値の統計的信頼性を理解しないと、得られたデータの精度が理解できませんが、解説している文献が少ないので、困ってます。
1)高須先生のRTKLIBの論文
「RTK-GPS用プログラムライブラリRTKLIBの開発・評価および応用」
http://gpspp.sakura.ne.jp/paper2005/gpssymp_2007_rtklib.pdf
3ページの6.3.3評価下の6.3.3.1 固定点測定 の事例で精度評価例がありました。
●やってること:
基準局のデータと電子基準局のデータ1年分を後処理でRTK計算(rnx2rtkpモジュールを使って計算)
●比較方法:
基準局からの基線長が0.3km,3.3km,4.3km,9.9km,19.6km,33.1kmの6水準の計算結果から、電子基準局からの精度評価をしてます。
●評価方法
①RMS値(2乗平均平方根)でFIX解データばらつきを表現
※RMS WIKI解説 標準偏差そのものです。標準偏差なので1シグマ相当のばらつきです。
=>1シグマだと確率分布の68%面積なのでばらつき全体をカバーしているとはいえません
しかし、GNSS分野では、1シグマで全てばらつきを表現してますので、精度の見方もそのレベルであると理解しておいたほうがいいです。工業製品の品質管理の世界では、最低でも3シグマ、管理をして5シグマをめざすのが常識なので、そういう感覚ではRTKの精度は、1シグマ表現であるということです。何故なら、自然界(大気と地形などの)の影響をうける現象なので人工的に管理できる工業製品の品質とは、精度管理の難易度が難しいためだと理解してます。
他の実験例、Ardusimple社の実験でも1シグマ1cm付近 3シグマで3.8cmです。
②FIX率
これは、毎周期の測定データを1エポックとカウントして全エポック数のうちFIXしているエポックの
%を表現したものです。これは、RTKILIBを使わなくも簡単にできますので、リアルタイムに計算できます。
※善意の基準局にも電子基準点からの精度評価をしたデータがあれば安心して使えると思います。
2)アイサンテクノロジー社の資料
「精度と正確度」
https://atmsp.aisantec.com/atmspark/modules/info_m2/topic/vol.2/20100226precision_and_accuracy.pdf
●会社概要 測量、3次元マップ制作システム開発をしているシステムインテグレーター
●精度計算のプロなので、真値=正確度とばらつき=精度と区分して解説してます。
●私の感想;やはり1シグマですべて管理してます。しかし、自動運転に使う技術では1シグマではまずい
と思いますので、GNSS技術では、自動運転は危ないのでレーザーを使ったLIDARがメインとなるのは道理です。GNSSは、
補完的な存在として自動運転に使われるので、精度より、コストと信頼性が優先となると思います。
=>信州MAKERSでは、以後RTK精度は、hAcc*3倍して3シグマ相当の
ばらつきとして、扱っていきます。ブログで公開している精度値として誤解が少ないからです。
※本記事から1か月後に基線長解析を実施して、3シグマ採用が妥当なことが実証されました。
hacc=1cmは、1シグマであって、RTKは、3シグマ相当の±3cmが実力です。
<基線長解析はRTKLIBを使わなくてもucenterとEXCELとubx-csv変換toolで簡単にできます。下記記事にtoolあります>
●RTKLIB用のF9Pの出力設定方法
F9Pは、内部でRTK計算してますが、RTKLIBは、衛星からの生データを各種変換処理して解析するシステムなので、F9Pからは、生データを出力します。
●やり方を教えてくれるLINKあった、広島市立大学の高橋先生に感謝!
「2周波GNSS測位モジュールZED-F9Pのu-centerでの設定」
https://www.s-taka.org/ubox-zed-f9p-configuration/
NAV-SAT,NAV-PVT,RXM-RAWX,RXM-SFRBXの4個だけ出力させて、NMEAなどは無しに設定
| UBXメッセージ | 概要 |
| NAV-SAT | 受信している衛星電波のID,電波強度、仰角、方位角などを記録 |
| NAV-PVT | Navigation Position Velocity Timeと精度など重要なパラメータがすべて1メッセージにはいっていて最もよく使われるメッセージです。100byte |
| RXM-RAWX | デジカメのRAWデータ同様に各衛星電波の生データです。中身は理解できてないのですが、大きいデータとなります。2KBくらいありました |
| RXM-SFRBX | Broadcast Navigation Data Subframe
航法データが収納されているらしいのですが、よくわかりませんが短いです。 |
※UBXの仕様書は、F9P interface description HPG1.3 ファーム1.3用ですが、1.13が無くなってます
※高須先生のRTKLIBの講習会資料 http://gpspp.sakura.ne.jp/paper2005/IPNTJ_Seminar_2016_1.pdf
※静岡大学の木谷先生の講習会資料 https://swest.toppers.jp/SWEST21/program/pdfs/s5a_public.pdf
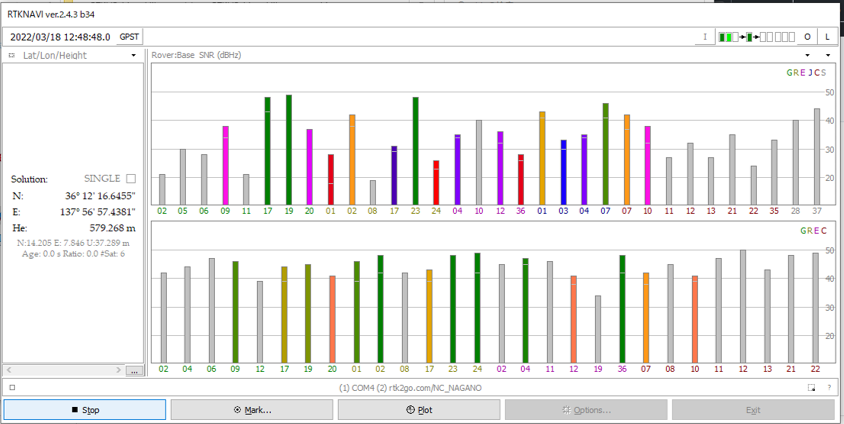
●RTKLIB v.2.3.4 b32 のリアルタイム表示アプリ RTKNAVIでF9Pを接続してみた。
=>この最新版でないと動作しませんでしたので注意です。
上記木谷先生の講習会資料を見ながらやりました。
詳細な設定は、難しいのでやらないでもRoverとBaseの衛星電波棒グラフがでました。
RTK計算をしてみたのですが、いつまでたってもFIXしないので何か設定がおかしいです。
次回以降RTK計算の方法など調査学習していきます。

●以後
RAWXの後処理方法を中心に学習していきます。




はじめまして。
私もRTKNAVIでいつまでもFixしない現象が出ています。
管理者様はその後Fixするようになったでしょうか?
対処方法をご教示いただけると幸いです。
【使用環境】
RTKLIB 2.4.3 b34
F9P(FW1.32)とD9C(FW1.01)の2段モジュール
u-center 22.07(u-centerではFixする)
ご投稿有難うございます。信州MAKERS管理人です。
私は、RTK LIBは、ちょっと触っただけですが、F9Pに比べ、RTK演算が遅くて最適化されてない感じがしました。
お使いのシステムの使用目的が理解できてませんが、RTKNAVIでRTK演算をやらせる必要性があるのでしょうか?
私は、RTKLIBは一切使ってなくて、自前のソフトでRTKをやってますので、F9P出力そのままで使用してます。
どうしてもRTKNAVIを使わないといけないようでしたら、作者の東京海洋大学の高須先生に直接質問して、ご指導を仰いだほうが良いと存じます。
多分、初歩的な質問にも丁寧にご回答していただけると存じます。
高須先生のブログはこちらです。https://gpspp.sakura.ne.jp/
宜しくお願いいたします。