

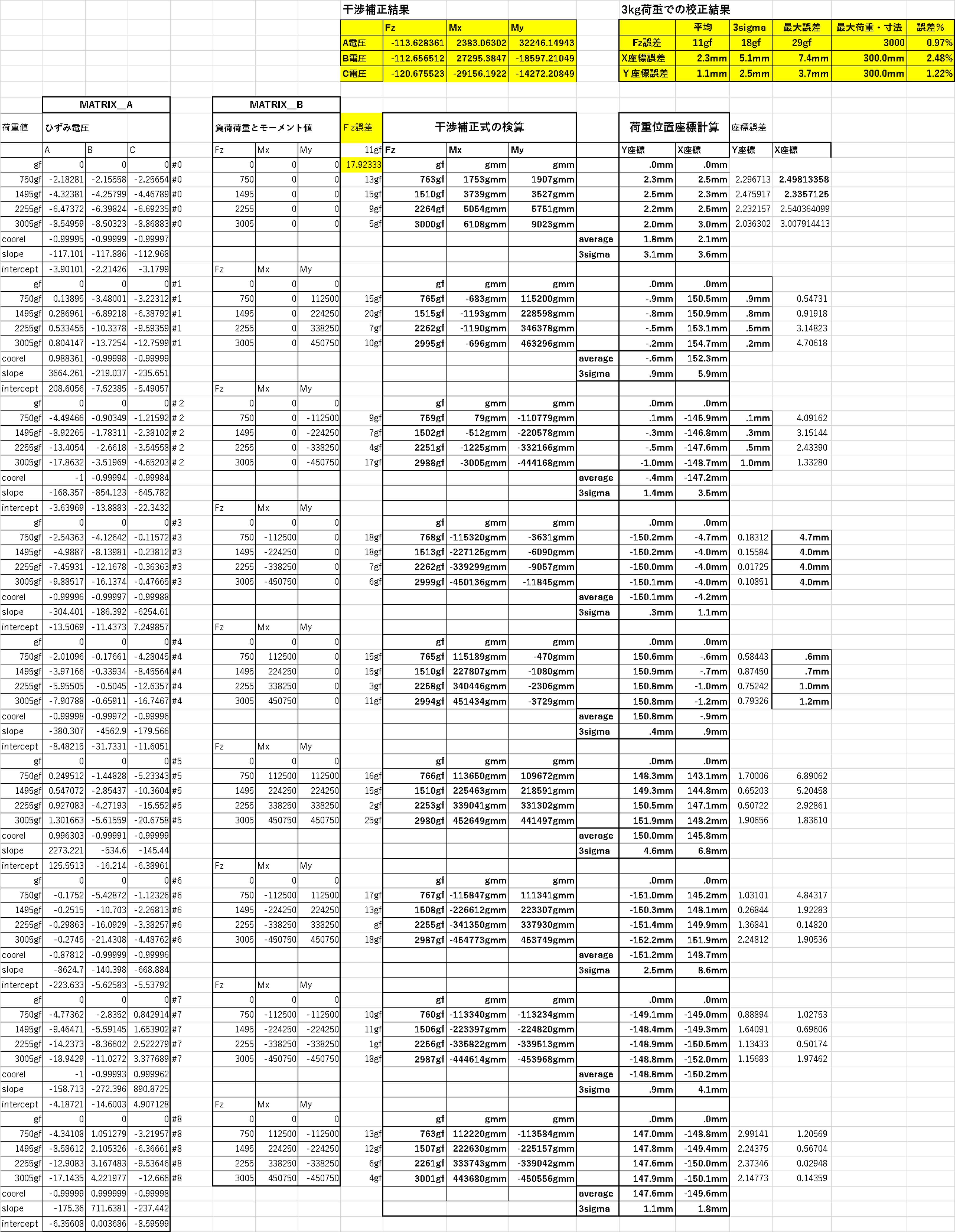
パイプ家具フォースプレートの校正データを干渉補正計算して、高精度がでました。
DIYの力センサは、素人工作で寸法精度がでてないので、干渉補正しないと精度でません。
干渉補正計算しないと100g近く誤差があって使い物にならない物が、干渉補正で30g誤差まで縮小したので、3倍以上精度を向上させてます。
ただし、素人工作でも直線性は0.999程度でてないと干渉補正の精度がでないので注意です。

【ロードセル】パイプ家具でフォースプレート作った<人間を計る>
●結果
300mmx300mm座標、3000g荷重での誤差3σ計算(後日30kg荷重まで校正します)
Fz荷重誤差:0.97%(±29gf)
重心X座標誤差:2.5%(±7.4mm)
重心Y座標誤差:1.2%(±3.7mm)

●やり方
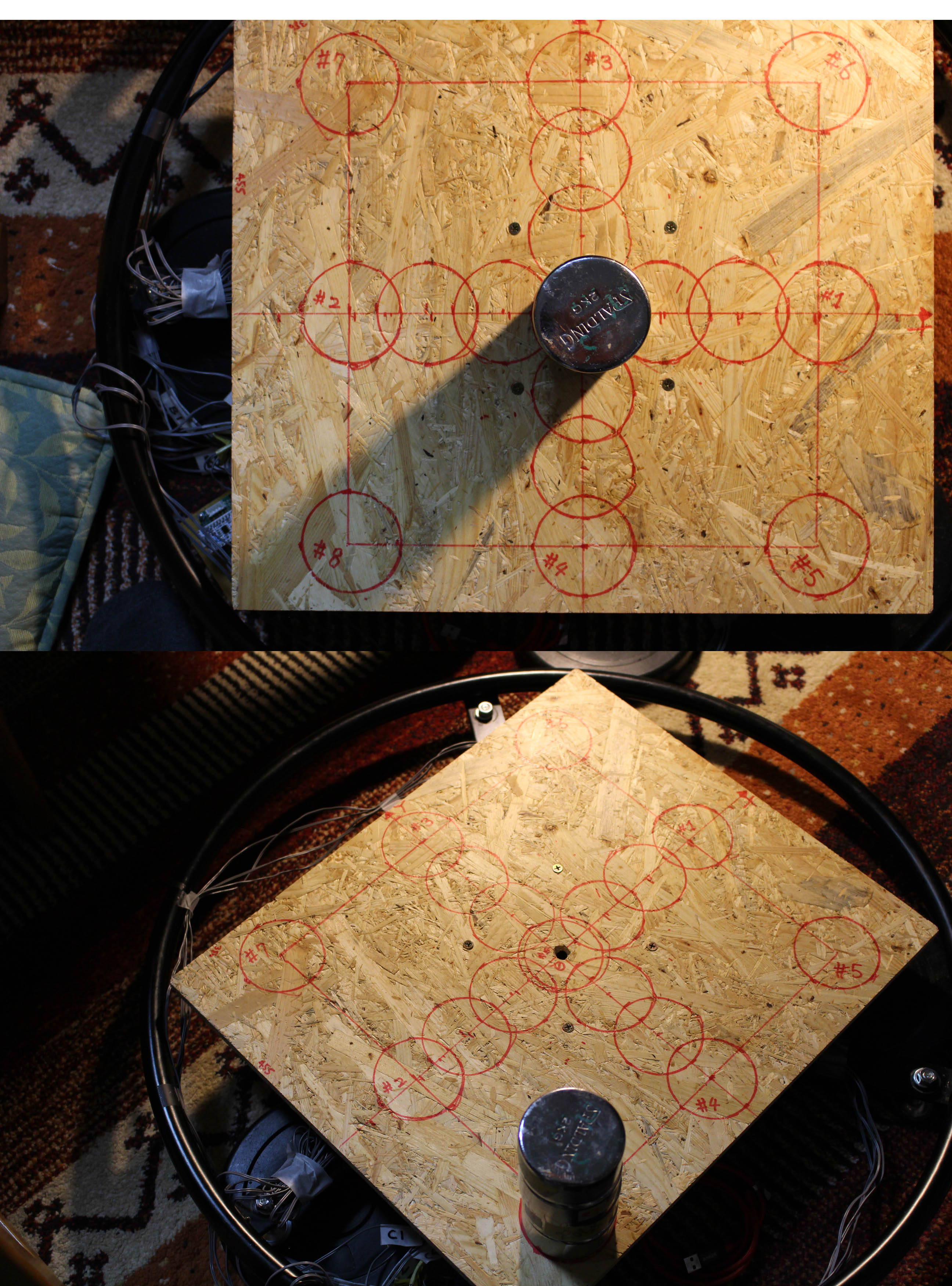
①錘を9か所に載せて、校正データ測定
赤丸の位置寸法の精度だけでも2-3ミリくらい軽くでているので、干渉補正に間違った
データを入力してしまっている可能性があって±7mmとかの誤差がでている
ような気がしてます。校正用の錘台の位置精度が全体の精度を決めるので、
開発テーマとして検討していきます。150ミリピッチで750g錘4個を順に載せて#0から#8の位置で静荷重をあたえてデータをとります。
②校正グラフからデータの平均を読み込み
CPLTでログしたデータをCPLTキャリブレータで、平均バラツキ計算します。
結果のEXCELシートで荷重値とひずみ電圧値の直線回帰をして、相関係数が0.999程度でているかチェックして、おかしい値がでたら、原因を調査対策します。
今回は、CPLTキャリブレータでデータ番号を手入力するのですが、入力番号を入れ間違って
とんでもない値になってしまった件が2-3件発生して再度読み直ししました。
③干渉補正計算(校正データが出来れば、計算は数分でできます)
今回は、自作のVBプログラム MatrixCalcurator ev0.4を使いました。
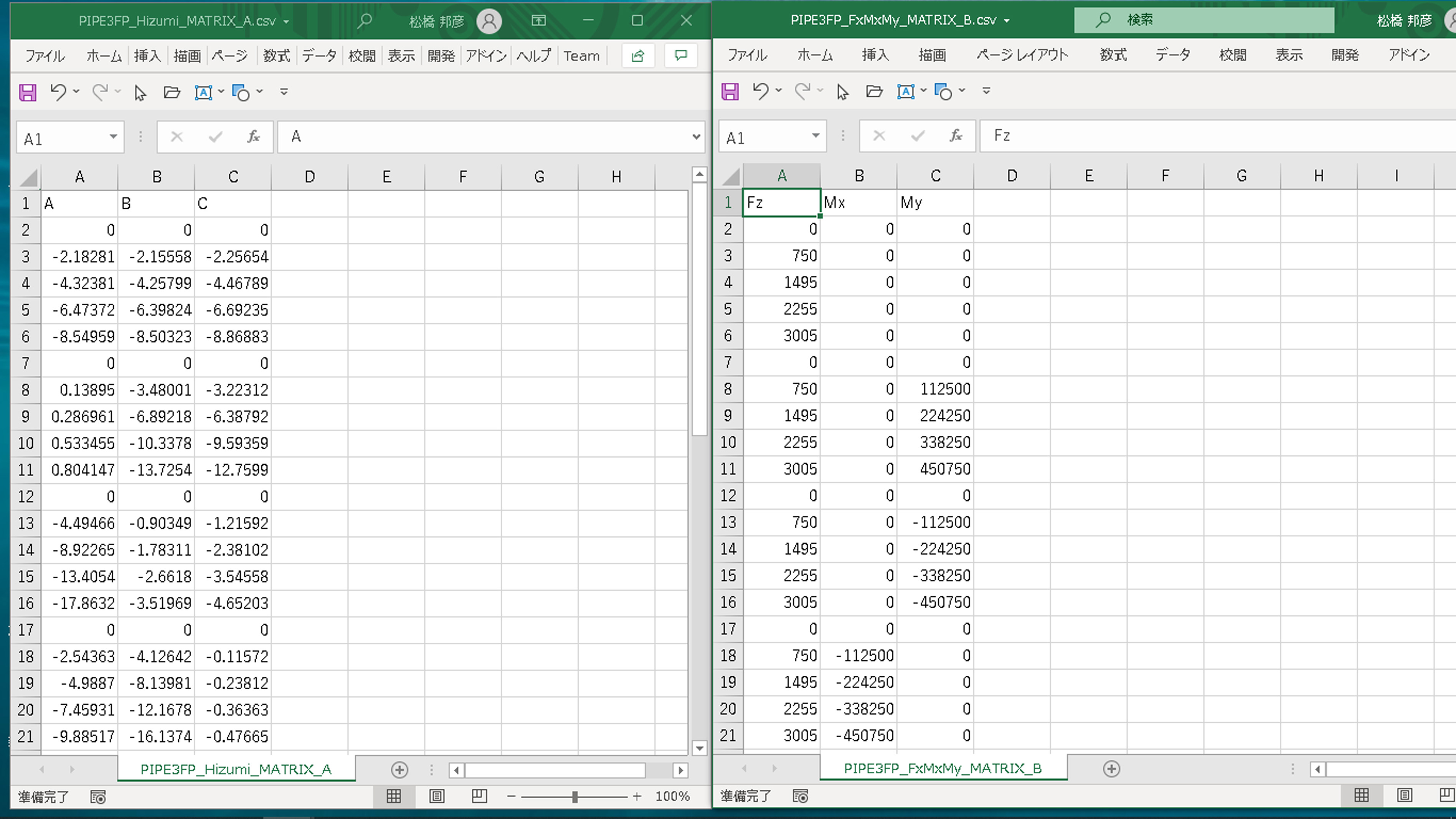
ひずみ電圧データを1行1水準で、測定数だけ行に並べてCSVファイルをつくります。(左)
負荷荷重とモーメントを1行1水準で上記ひずみ電圧データ行番号が合うようにCSVファイルを
るくります。(右)
Matrix_Caluclator_rev04の使い方は、下記記事で解説してあります。
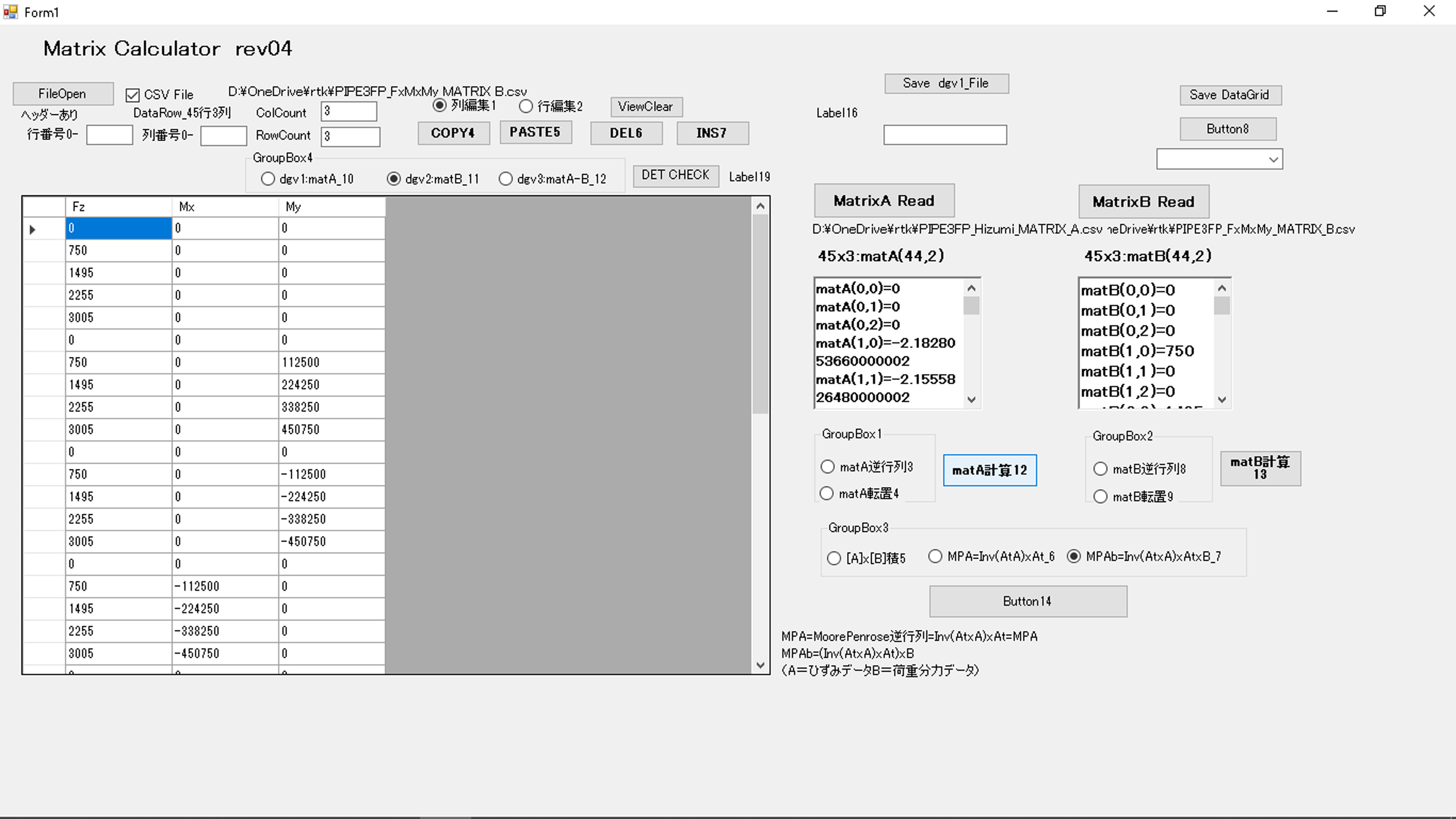
操作1:上記左のひずみ電圧CSVファイルをMatrixAに読みこむ
操作2:上記右のFzMxMycsvファイルをMtarixBに読み込む
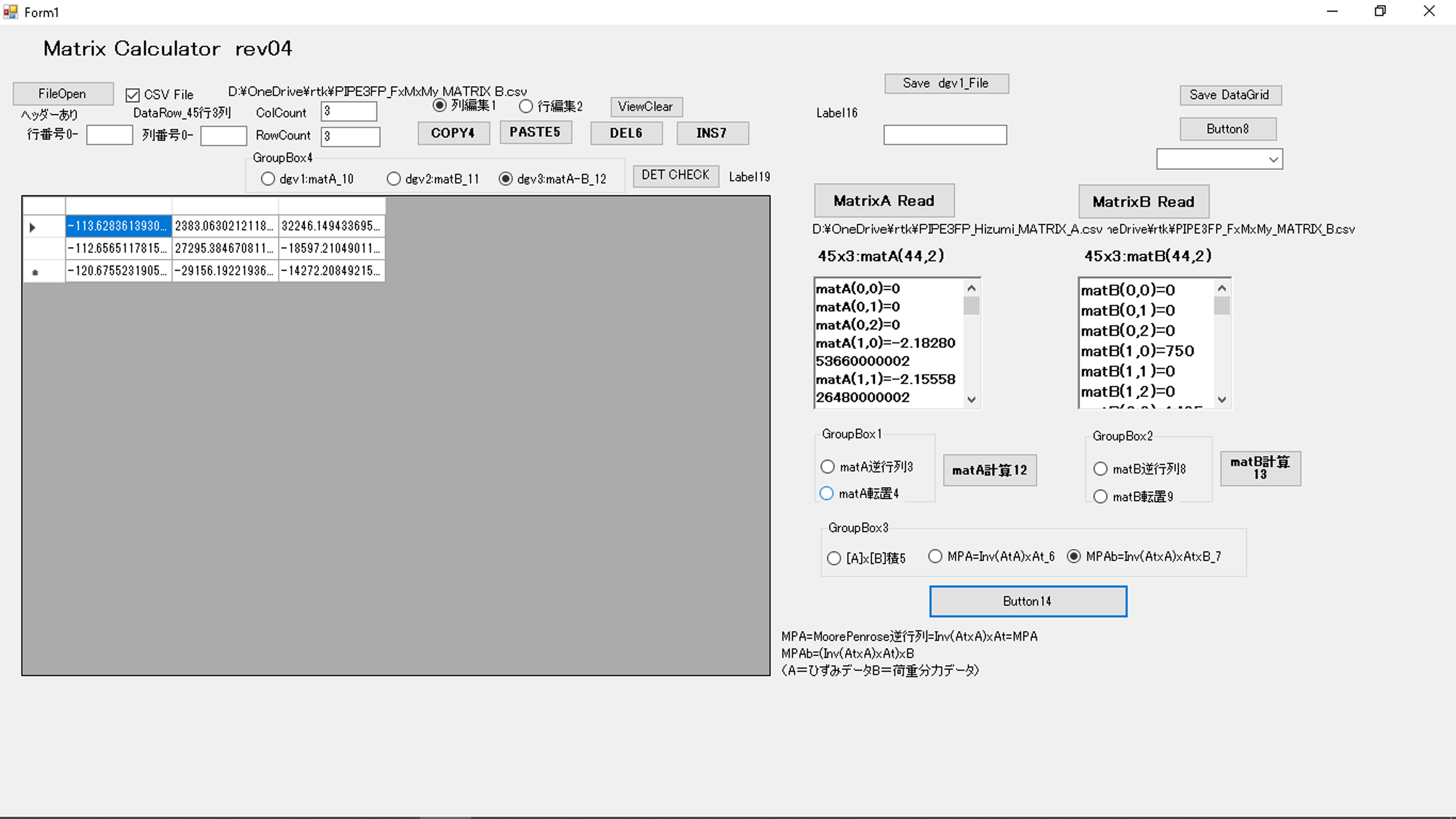
操作3:ラジオボタンMP Ab=Inv(AtxA)xAtxB_7にチェック
操作4:ボタン14を押すと、干渉補正マトリックス結果が出る
詳細は、下記を学習していただければ、理解できると思います。
行列計算の基本が判っていれば大丈夫です。
【VB.NET】Matrix_Calculator_rev04で干渉補正完成<簡単干渉補正>
EXEファイルはこれです。Matrix_Calculator_rev04
プロジェクトファイルはこれです。Matrix_Calculator_Prjrev04
ソースはGISTに載せてあります。https://gist.github.com/dj1711572002/70c7d72640f432da66f2f574079b97e6
Matrixライブラリの記事は、こちらです。
④干渉補正の結果確認テーブル
●以後
人間が乗るフォースプレートなので、70kgまで荷重したいところですが、
ダンベルが30kgまでしかないので、30kgまで校正してみて、
あとは、自分の体重がでているか確認して校正を完了とします。
11月12月は、実家の工事で忙しいのですが、年内にはフォースプレートで
人が乗って慣性運動やモノに触れるとしたらどうなるかを測定してみたいです。





