SCP動作成功したので、次に、荷重条件を振りながら、干渉補正精度を評価してみました。
4条件でやってみて、2条件は、当初の良い精度がでたのですが、他の2条件が悪い精度(線形がでない)となってしまいました。
■干渉補正精度が違った結果
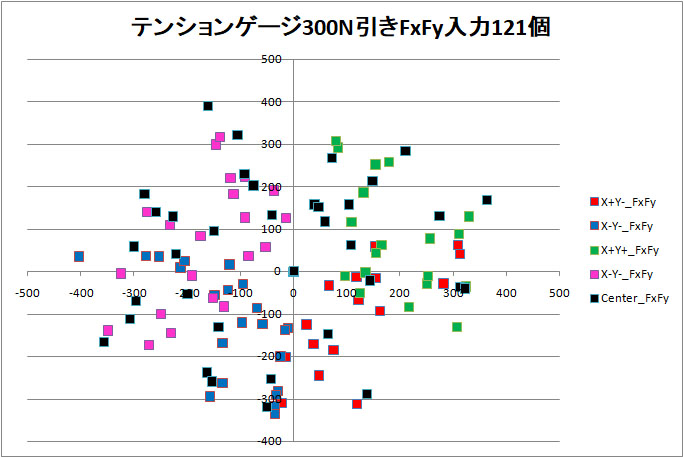
●精度が良いデータ(0.999前後)
左:指で糸を引いたり中心で指で押し引きした場合、83データ
右:300Nのテンションゲージで引くだけの場合、121データ
いずれも同等の精度がでてます。
●方針としてできるだけ埋めるような荷重方向と大きさで荷重しました。
データ数は、83と121データ
FxFy分布は、指引きはまばらになってます。

●精度が悪いデータ(線形がでてない0.99前後)
左:指で思い切り引いた場合 水準は38個と少ない
右:1000Nのテンションゲージで引いた場合 水準は177水準と細かく荷重
1000NのテンションゲージのFyの線形が0.97と酷い結果となりました。
Fxも0.99台で全然ダメでした。

■結果の考察
1日かけていろいろ試した結果、荷重方向と水準数とは全く関係ない
荷重範囲の違いが精度の良否を分けていることに気づきました。
精度が良い干渉補正は荷重範囲が500g以内
精度が悪い干渉補正は荷重範囲が1000g以内でした。
つまり、500g以上になると何か線形性を阻害する現象が発生する
ということです。基本に戻って、
「荷重時の非線形性が最もデータに悪影響を及ぼす」という結論です。
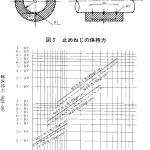
■原因
いじってみると1000gだとSCP治具全体の傾きが大きくなることが
最大の原因と判断しました。
ダイアルゲージをあてて測定してみると

この変形が干渉補正入力精度にどのような影響がある検討するとMxモーメントが3%程度増えることが判りました。変位なので線形で増えないので、データに非線形成分を混入してしまうのでたかが3%というわけにはいかないと思います。

●以後
今回のSCPは、3分力のみでモーメント成分は、入力位置を定義して、計算でモーメントをだしているので変形があって腕長が変わると嘘データを干渉補正計算に混入させてしまう欠点があることが判りました。
対策1:剛性をあげて、干渉補正荷重範囲で変形が少ないSCPにする
対策2:6分力SCPにして、与えるモーメントも計算によらない実測モーメントで荷重する
現在被測定物にしているアルミ丸棒の6分力センサをSCPにすれば6分力SCPになるのですが、SCPとしての精度としては3%程度では悪いので、SCPとしては1%程度は欲しいので市販ロードセルで高剛性化と6分力化も検討したほうがいいと思ってます。
とりあえず,SCPを切り離して、1つの6分力センサとして丸棒を独立して
使ってみることにします。1年半前に作った丸棒センサですが、Fzが無い点とモーメントの精度が悪くて、使えないと放っておいたのですが、Fzを中華ロードセルに代替えして、最新の干渉補正方法で、FxFyMxMyMzをある程度までの精度レベルまで校正できたのが良かったです。
更に、丸棒でなく角棒も用意してあるので、いろいろな6分力センサを作っていこうと思います。