お盆からスタートして3か月がかりで、SCPシステムようやく初期の目標の確認実験が成功しました。
■達成した事
①6分力センサの校正で錘荷重を姿勢を変えて何十回も負荷する作業が大変だった。
=>指先で数か所押し引きするだけで、干渉補正に必要なデータ群が自動的にログされる(SCPが入力分力成分をセンシングして管理してくれる)
②干渉補正計算がワンタッチで瞬時に得られる
=>Matrix_Calculator_rev04の使い勝手が優れている
③精度はFxFyFzで3%以内が得られた。
=>錘で何十回もやっても2-3%しかでないので指で押し引きするだけでも同等レベルの精度が得られる。
④慣れれば数分で荷重入力から干渉補正結果のフィードバックまで完成してしまうので、実験測定時毎回校正が可能になるため、従来の力センサ製品の概念が変わる。
=>製品に干渉補正機能を搭載して、毎回TPOに合わせて補正データの最適化ができる可能性がある。
■ノウハウの塊です
①SCPの校正実験操作は、プログラムを改造しながら、いかにスマートに校正作業と干渉補正処理の手間をかけずに迅速に行えるか試行錯誤で作り上げました。プログラムの切った貼ったで、ぐちょぐちょのプログラムになってしまったので、コードの公開はしません。(解説ができないため)
VB.NETのプログラム学習しながら、rev80まで上がってしまいました。

特徴1:DataGridViewを多用してます。3個のDGVでデータを読み書きして管理してます。ログ用dgv1、干渉補正MATRIX展開用dgv2、荷重位置定義用dgv3とそれぞれのcsVファイルを駆使してるので、慣れるのが大変でした。6cH以上ならDGVが便利です。
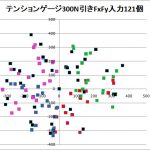
特徴2:6個の散布図で、3種類の6分力成分を観察してます。6分力センサからのひずみ電圧値とSCPからの入力している6分力、干渉補正計算ずみの6分力をそれぞれ比較しながら見られるようにしてます。
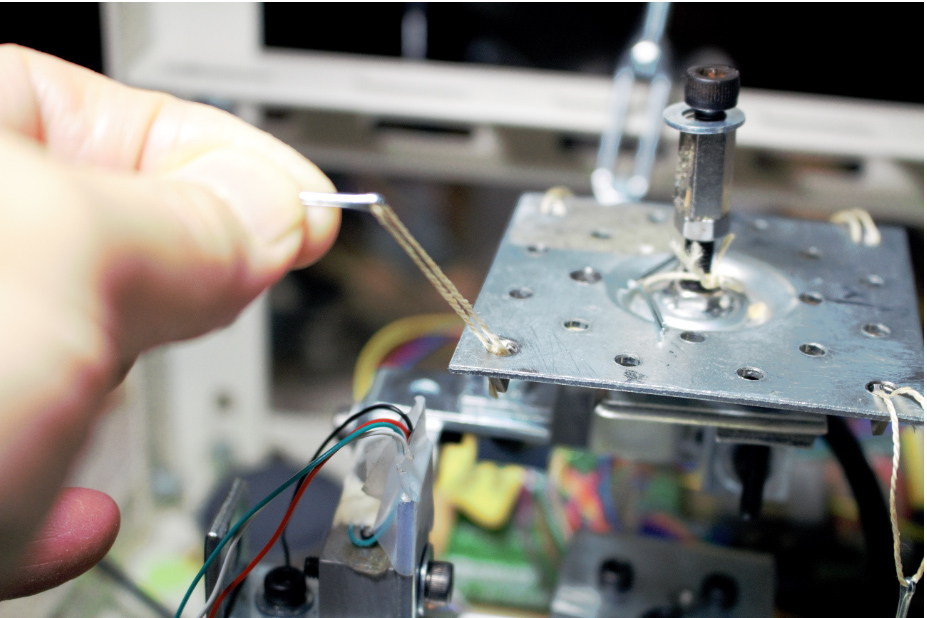
②荷重方法がノウハウです。
●やり方:タコ糸(アラミド坪糸)を叶結びという結び方で小さな輪を作って割ピンで穴に通して引っ張る方法が一番良かったです。

結び方はこちらのページで教えていただきました。分かりやすくて感謝です。http://trpla.nrc.gamagori.aichi.jp/kyoiku/musu/musu/
もやい結びだと力でほどけてしまうので、叶結びして瞬間接着剤でとめてます。

●荷重原理:
6分力全成分を入力する必要があります。一か所で方向を変えて押し引きすれば、6分力を発生させることはできますが、1か所ではダメで、
6分力の±方向で12方向とその組み合わせになります。ですので、指先でどんどん方向を変えながら、5か所でFxFyFzの±方向に押し引きを行います。
5か所は、Fx+Fy-、Fx+Fy+,Fx-Fy+,Fx-Fy-の4か所と中心位置1か所です。
各方向での力の水準は3水準以上データをサンプリングします。

作業は利き手で押し引きしながら、一瞬静止させて、空いている手でデータサンプリングボタンを押しながら押している間の平均値をVBで計測してログします。ログと同時に散布図にプロットして線形性も確認します。

■FxFyFz精度
錘での3分力荷重精度がFxFyで最大±30gf程度だったのですが、
手で押し引きした場合も3σで±40gf以内で収まってました。
■Mx-Myモーメント精度
生データのゆがみが干渉補正で真四角になっているのが判ります。
定量的なモーメント精度の定量化が未だ決まってません。
錘位置の±3mmの違いが見えますので、そのくらいの精度がでています。

■以後
もう少し、いじって、荷重位置と荷重方法のノウハウを詰めていきます。
3次元ベクトル表示など、力とモーメントの表示方法を考えていきます。
12月には、SCPを終わらせて、大量に作ってある自作多分力センサのスマート校正をしていこうと思います。
1月からはスキーのRTKテーマに入りますので、3月まではRTK開発が始まります。