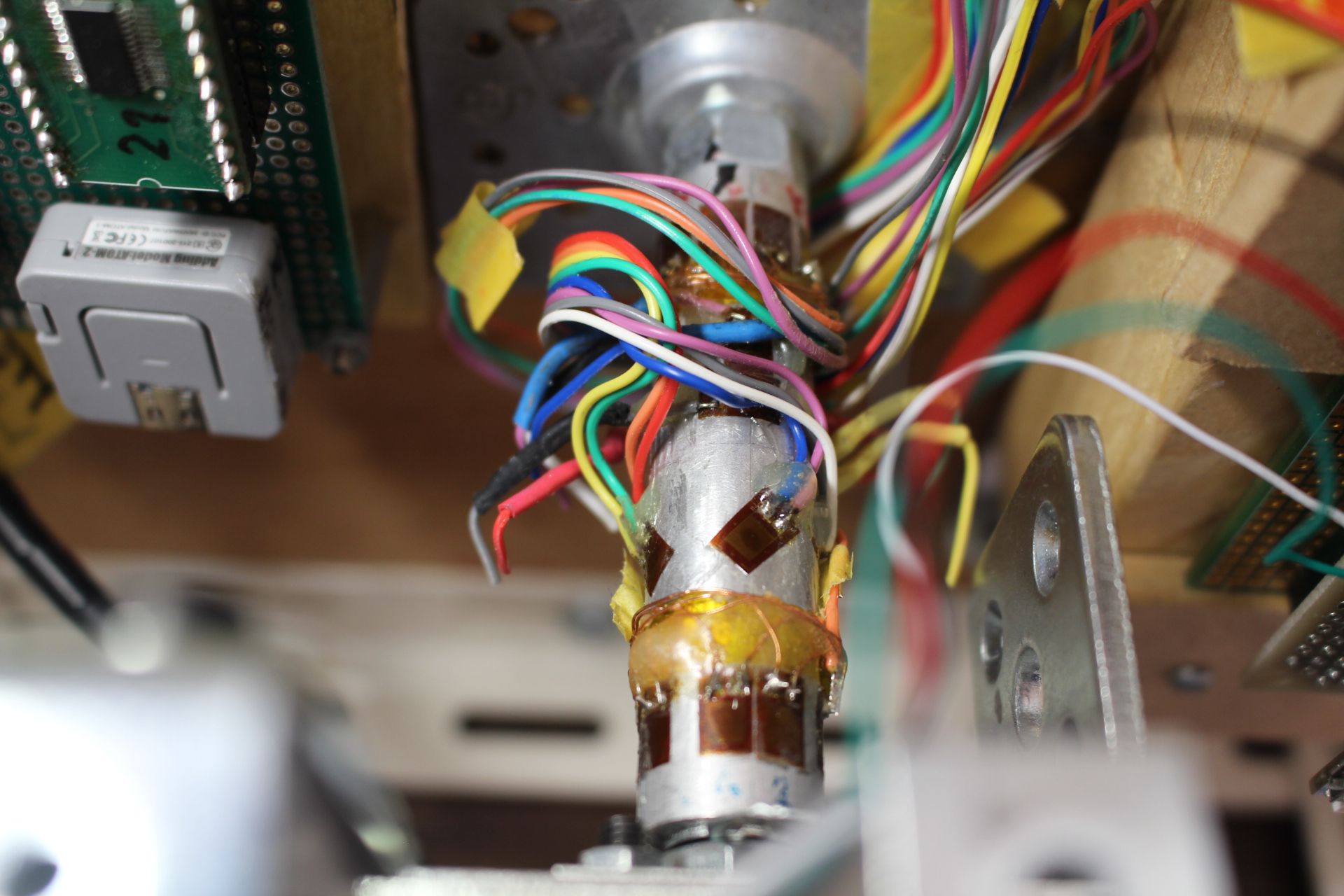
被測定物の6分力センサとその上に3軸のSCPを載せて、校正台を組み立ててます。水準器で水平をだしながら、組んで、負荷モーメントにも耐える剛性もぎりぎり確保しました。



■SCP校正台の構想
●構想:荷重は、錘以外に引っ張りバネで任意の方向任意荷重します。
効果:SCPが被測定物に固定されているので、負荷がいい加減でも、SCPが
正確な分力にばらして被測定物へ入力される全分力を管理してくれます。
●理由:力センサの校正で一番大変なのは、与えた力入力ベクトルが本当に
理論上の大きさと方向になって被測定物に入力されているかです。
今まで滑車に錘をぶら下げて、各種方向で被測定物へ力を入力してましたが、滑車の摩擦とか、糸の微妙な傾きなど管理できないパラメータがあって
それらが、校正入力の精度を低下させていた。
●本当は、6分力SCPがいいのですが、精度の良い6分力センサを作ってないので3分力SCPでモーメントだけを管理しながら6分力センサを校正、干渉補正を完了させて、その6分力センサをSCP用の6分力にするという作戦です。
■校正台の設置座標とセンサ出力の正負方向合わせ
VB.NETで作った、16CHリアルタイムモニターを使って、同じ動きのCHだけグラフに出して、正負の方向が座標定義と一致するか合わせました。
合ってない場合は、マイコン側のプログラムでマイナスを掛けて合わせました。

■フォースプレートとして、動作するか実験
●フォースプレート原理
| 6分力センサで Fz,Mx、Myが測定できれば、 錘の水平座標(Xcm,Ycm)が計算できます。Wgの錘を載せた場合 錘が中央にある場合は、Fz=W g,Mx=0 gcm,My=0 gcmです。 例えば錘がX=+10cmY=0cmにある場合は、Fz=W g Mx=0 gcm My=W g*10cm となります。 X= モーメントMy gcm/ 荷重 W g=My/W cm Y= モーメントMx gcm/ 荷重 W g=Mx/W cm という簡単な計算で、X,Y座標がもとられます。 |
※翌日の2020年10月22日に干渉補正してから位置精度検算しました。
Fz精度±13g、X位置±1.6mm Y位置精度±4.6mmでした。
●試しに錘位置を中心回りに8か所振って測定しました。

これの測定グラフは、
荷重のFzはピンク色でどの位置で一定値です。これは、秋月の20kg中華ロードセルがRoverbal式でモーメントを相殺できるゲージ配置になっている証拠です。茶色のMxが位置によって多少変化しているのがクロストークもしくは、XY座標の直行精度が悪いのかもしれません。
MxMyは干渉補正しなくても5%以下ではでているのではないかと思います。

●以後
SCPシステムで校正して2年前より高精度化したいと思います。
少なくとも最悪3%の部分があって平均で1%台を狙います。
2年ぶりに6分力センサをいじって、面白さを思い出しました。高校の物理で習ったことが、実験できる点が学生さんにはいい教材になるのではないかと思います。この6分力センサの作り方は、下記記事群にあります。
今回は、Fzは、この丸棒センサではゲインが小さすぎるので、てっぺんに秋月のロードセルを載せてFz部にしている点が2年前と違う点です。