パワーメーター2020は、クランク以外にサドル、ハンドルからの入力も多分力測定することで人間の踏力ベクトルのつり合いを測定することを目標にしてます。先月は4アクティブ4ダミーゲージでシートピラー軸力ブリッジを組んだのですが、ゼロドリフトと荷重位置干渉がひどくて使い物になりませんでした。
そこで、曲げモーメントでサドル荷重を得るアイデアが出たので試作して確認してみました。
※2021年 最新の干渉補正実験フォースプレートで1%切りでやり方解説してます。
自作の力センサの場合、寸法精度が出てないので、純粋な分力が抽出できなくて、複数の分力が混じった状態で測定データ得られるます。そこで、複数分力を測定して、干渉補正計算で純粋な分力に分離する計算処理が必要です。使う原理は、MoorePenroseの逆行列です。多次元連立方程式できっちり解がでないのが通常の実験なので
データをたくさんとって、多次元連立方程式で回帰計算を行って、解に一番近い近似解を得る計算です。
干渉補正の原理解説記事
※2020年10月追記
本テーマ、ダイエット目的で自転車に乗っているので、どうしても欲しいガジェットなので何年かけてでも一般の体重計程度の精度が欲しいと思います。そのために、シートポストを4-6分力センサにして精密な校正をおこなう必要があります。そのために、Smart Calibration Probeシステムの開発を最優先にしてます。SCPができると自作多分力センサの校正が簡単で精度がよくなるはずなので、いろいろな用途に応用が効きますので、2020年いっぱいかけても価値があると考えてます。パワーメーターは、チェーンの伝達効率が見えてきたところで、中断してます。SCPができた後で完成させたほうが品質がよくなるので2020年のパワーメーター開発は来年以降に延期します。
※2020年12月追記
4か月かけてSCP何とか完成させることができました。今まで自作6分力センサの校正と干渉補正に何日もかけても十分な精度が出せなかったのですが、オンデマンドリアルタイム校正システムのSCPで数十分で干渉補正まで簡単にできるようになりました。2021年以降の自作多分力センサの開発が進む原動力になるオンデマンド校正システムです。SCPカテゴリー
●ペダリングにおける体重の使い方を測定する
ペダリングの反力のメインは体重です。
私達は、体重を使って踏力をねん出しながらペダリングしてます。
しかし、どのように使っているのか見たことがありません。
そこで、ペダリング時のサドルにかかる鉛直荷重を測定するために
シートピラーを2分力センサとしました。

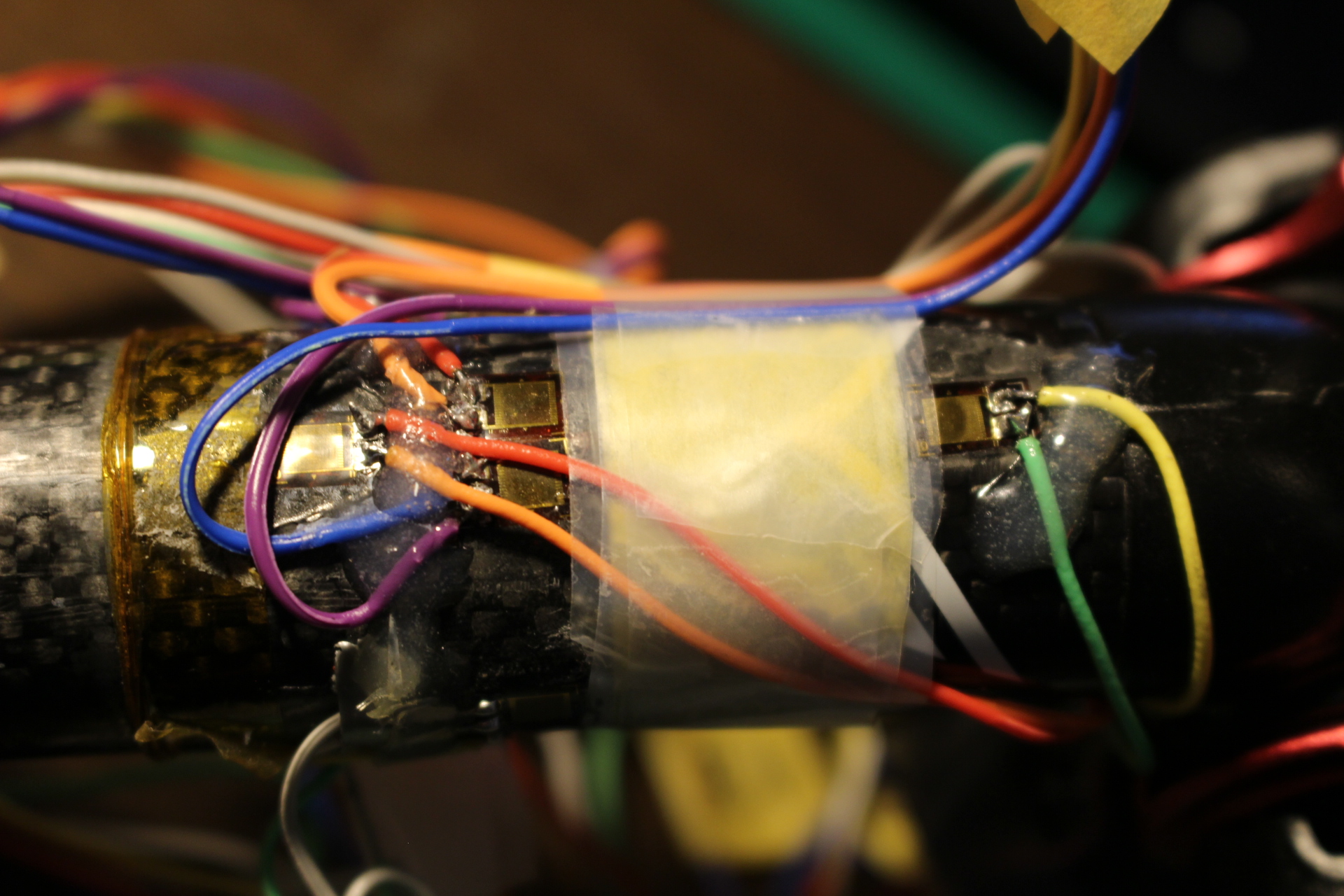
●Roverbalブリッジでサドル荷重を測定するアイデア
体重がサドルにかかると支えているシートピラーの傾斜角度分だけ、せん断力がかかります。
そのせん断力をRoverbalブリッジで測定することでサドル荷重を測定するアイデアです。
Roverbalブリッジ原理は、こちらのページでご覧ください。


●モーメントによるクロストークが発生
Roverbalブリッジ机上では、きちんとでていたのですが、フレームにとりつけて、重りを載せると、重りのサドル水平位置によって、せん断力が非線形に変化してしまいます。
原理上有りえないのですが、シートピラーの応力分布が
クランプで締め付ける拘束で、机上と違ってしまっているらしいです。
シートピラーを上げてクランプ位置から離すと、クロストークが線形
に変化しました。シートピラーの材質がカーボンなのでクランプでの
つぶれが大きいので影響を受けやすいと思います。アルミパイプのしっかりしたシートピラーのほうが、精度よくなると思いますので、2本目は、アルミピラーで試作します。
クロストークを補正するために、シートピラーの前後の曲げモーメントブリッジを追加しました。何んとか線形がでたので干渉補正作業を行いました。まる1日かかるので、暇がないと干渉補正はできません。
今まで6軸とか3軸の干渉補正をしたのですが、最小の2軸の干渉補正を
やることにしました。

●干渉補正でモーメント成分を消去
干渉補正の基礎はこちらのページです。
①負荷した錘で発生するモーメントを計算します。
単純にモーメント測定ゲージまわりの錘荷重x腕長です。

②干渉補正計算
EXCEL手動でちょっこっとやってみました。
やり方は、干渉補正の原理記事で2分力の行列計算を解説してあるとおり
に下記EXCELで処理してあります。基本式は、
MMULT(MMULT(MINVERSE(MMULT(TRANSPOSE(X),X)),TRANSPOSE(X)),Y)です。実験データが矩形行列になるので一般化行列を使って連立方程式の解を最小二乗法で最も近い解を得ます。
A:求める係数行列、X:ひずみ値データ行列、Y:負荷した分力データ行列
XA=Y
上式を解くのに一般化逆行列(MoorePenrose逆行列)を使います。
係数行列A=(XTX)-1XT Y となります。
将来的には、SmartCalibrationProbeシステムで全自動化する予定です。
錘荷重に対するFz精度は、平均すると2-3%で最悪6%でてます。

●干渉補正式をマイコンプログラムにいれて実測
昨年度PM2019で、シートピラー用L432KCでAD7193 SPI基板作ってあるのでこれを活用して、1Chにせん断力(Roverbalブリッジ)2chにモーメントをいれました。3chからサドル荷重の補正計算値がでます。
①干渉補正前
2.5kgの錘4個を順次載せてます。サドル位置で中央、後、前端
青線は、シートピラー軸力を2ゲージ法で測定したものです、干渉とドリフトが大きくてとても体重測定できなかったものです。
しかし、干渉の出方をみると、緑線のモーメント変動に比例しているので
モーメントとせん断力の2軸で干渉補正がうまくいきそうです。
青線の軸力は、せん断力とモーメントに対して線形性がでてません。
ドリフトがひどい点でとても干渉補正に使えるデータではありません。

②干渉補正後
同じ負荷条件で青線に干渉補正計算結果を入れ替えてあります。
サドル 中央ー後ー前端位置による荷重差
(モーメントによるクロストーク)が消失してます。

●干渉補正の効果を得るためのTIPS
今回は、首尾よく干渉補正の効果が得られました。TIPSとして
下記に注意が必要です。
⓪校正で使う負荷分力の種類と大きさは、実際に測定であらわれる分力を包含してないといけません。しかし、これが大変です。今回は、体重と限ってるので、手からハンドルの反力があるときは体重が正確にでません、手軽にすべての分力を校正実験時に発生させるために現在Smart Calibration Probeを開発中です。
①すべての荷重負荷に対して、ひずみゲージブリッジが線形であることが必須です、相関係数で0.999以上が理想ですが、0.998が最低限度です。
②実際に荷重実験したときの負荷がひずみゲージブリッジにどのような分力として入力されている正確に計算すること=>モーメント値、せん断力値の
計算精度が悪いと干渉計算が収束しない場合があります。
③測定する系の力学的なシミュレーションができていること。
=>計算ずくですべて片付けられる系でないと干渉補正はきかない。
●実際に乗ってみた
コロナ太り+長梅雨太りの83kgの体重で乗ってみました。
・全体重からハンドルに手をかけて、ペダルに足を載せると20%くらい(10数kg)減ります。
・軽く回すだけではあまり大きなサドル荷重変動はありませんが、細かな
変動があります。
・思い切りふむとサドル荷重がゼロ近くまで減りますのでその分ペダルに
いきます。

●考察
精度的には、まだ体重計としてのレベルではありません。ハンドルに手が触れると干渉補正負荷条件からはずれるため、値が狂いますので、ダンベル荷重だけで干渉補正用校正データを作っていても、全自由度の力入力に対応できませんので、やはりSmart Calbration Probeを完成させて、全方位入力の干渉補正をかけないと完璧な体重計にはなりません。
SC‘Pの基本校正をどうやるかアイデアがでないので詰まってますが、
7月~8月でSCPの目途がたてば、パワーメーター2020テーマの
半分は成功したと思います。
●以後
干渉補正技術によって、サドルにかかる鉛直荷重(体重)が測定できるようになりました。精度上の改良点が多数ありますが、目的に応じて改良していきます。ペダリングの解析の一つの分力として、活用します。
別途、サイクリング時の体重計として、自分の体重と自転車の重さも測定できるはずですので、新たなサイクリングガジェットとなる可能性があります。そのためには、実用化のための長い道のりがありますが、もし、ガジェットを作りたい方がいれば、基本的なやり方を教えてあげます。
信州MAKERSの連絡先はich48397@wd5.so-net.ne.jpです。
※追記 2020年11月
左右クランク、シートピラー、ハンドルの4か所で6分力測定することを実現したいのですが
ひずみゲージを大量に貼った後の校正作業が膨大になるので、スマート校正システムを構築してからひずみゲージ貼りをしたほうが、合理的で効率も良いと考えて、2020年の下期全部をSCP(SmartCalibrationProbe)開発に注力してます。VB.NETで測定準備から干渉補正までリアルタイムでモニターできるようにして、計測した瞬間に全体が見えるようにします。
現在進行中です。カテゴリーはSCPです。
https://shinshu-makers.net/shinshu_makers/?cat=50