精度検証治具できたので、家の前で測定してみました。精度ってどう測定してどういう計算すれば、客観評価できるのかは、やりながら考えていきます。
●測定条件
①F9P測定条件
Movingbaseモードの場合、NTRIP無しでも、相対精度がでるはずなのでNTRIP有無で測定
A:NTRIP有
B:NTRIP無
➁アンテナ位置
| 位置 | Baseアンテナ位置 | Roverアンテナ位置 | F9P設定 |
| 1 | 板40cm目盛 (回転) |
板40cm目盛(回転) | MovingBase masterデフォルト |
| 2 | センター軸上 (静止) |
板40cm目盛(回転) | MovingBase masterデフォルト |
| 3 | 約3㎡離した車屋根上(静止) | 板40cm目盛(回転) | MovingBase masterデフォルト |
位置1 板上に対称に置く

位置2 中心の軸上に置く

位置3 車の屋根にBASEアンテナ置く

●VIEW MESSAGES-CFG-PRT設定備忘録
MovingBaseモードで重要なのは、データをできるだけ高速に送受信して、F9PCPUに負担をかけないことです。
①USB
UBXデータだけ転送してます。今回は、無線転送なので使ってません。

➁UART1
OUT送信のみでUBXのみを転送してます。この出力がNucleoF446REの高速シリアルポートへ接続されていて、460800bpsでバッファ受信した後、230400bpsでXbeedeゆっくりとPCへ送信します。

③UART2
SimpleRTK2B上にSimpleRTK2Bliteを載せた接続で460800bpsでRTCM3だけ送受信
●ログから計算処理方法
Xbeeに接続したPCでUcenterで230400bps受信して、ログします。
ログしたデータは、EXCEL VBAプログラムで、バイナリーデータから
NAV-PVTの結果とNAV-RELPOSNEDの結果を測位データとして変換します。
①バイナリを16進データに変換して、受信順にNAV-PVT100バイトと
NAV-RELPSONED72バイトで行に並べます。Sheet1,RELPOSNED,PVTシートを作成
この処理は数秒です。
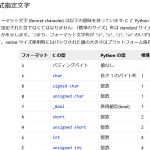
➁Sheet1の16進データから、PVTとRELPOSNEDの中で必要な測位データを抽出計算
HighPrecisionデータを抽出してなかったので後日プログラム追加しておきます
| センテンス | 抽出したパラメータ | 内容 | 数値表現 |
| NAV-PVT |
iTOW | Time Of Week日曜零時からmsecカウントした時刻単位 | 4バイトの符号なし長整数 msec単位 |
| Longtitude | 経度 | 4バイトの長整数 deg単位 小数点7桁 1.1倍してmm単位に変換 |
|
| Latitude | 緯度 | 4バイトの長整数 deg単位 小数点7桁 1.1倍してmm単位に変換 |
|
| hMSL | 海抜 | 4バイトの長整数 m単位 | |
| NAV-RELPOSNED |
iTOW | Time Of Week日曜零時からmsecカウントした時刻単位 | 上記PVTのiTOWと同期されている |
| relPOSN | BASE基準としたRover緯度方向の相対距離 | 4バイトの長整数 cm単位 | |
| relPOSE | BASE基準としたRover経度方向の相対距離 | 4バイトの長整数 cm単位 | |
| relPOSD | BASE基準としたRover上下方向の相対距離 | 4バイトの長整数 cm単位 | |
| relPOSLength | Base-Rover間距離 | 4バイトの長整数 cm単位
両固定の場合は一定値 独立固定の場合は、可変 |
|
| relPOSHeading | Base-Rover間 方位角度 |
4バイトの長整数 deg単位 | |
| accN | N方向精度 | 4バイトの符号なし長整数mm単位 | |
| accE | E方向精度 | 4バイトの符号なし長整数mm単位 |
●結果
未だ試運転なので、結果のデータの評価はできてませんが、方法の検討としてやってみました。
①A:NTRIP有 1:両固定
3σで2.28cmならそこそこいい精度だと思いますが、本当かどうかまだ未考察です

➁A:NTRIP有 1:両固定 NTRIP基準局から計算したRTKでの測位データ
家の前なので北方向の衛星は見えない状態で、測位しているので、悪いデータになるのは当然だと思いますが、上記MB測位だと、高精度がでている点がMBモードのメリットだと思います。見晴らしの良い場所で測定すればこれは向上するはずなので
場所をかえて検証測定します。

●以後
NTRIP基準局を使う場合とMovingBaseを使う場合の精度の事例ですが、正しいかどうか未だ検証できてないので最終的にはどうなるかわかりませんが、今までの経験上と同じ結果がでてます。
これから、BASEとROVERを離して独立させて動かす条件でも測定していきます。