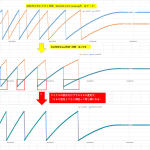
昨日のmz軸に続いて、センサの軸を付け替えてmx軸とmy軸回転で原点補正をしました。すべてYAW回転です。

●mz軸回転(昨日のデータ)
原点移動cx=0.190674 cy=-0.08777


●mx軸回転
原点移動cy=-0.0503 cz=-0.0703


●my軸回転
原点移動 cx=0.2023 cz=-0.0502


●結果
①各軸ともに原点補正をすればエンコーダ角度とほぼ一致した回転角度を出力してくれることがわかりました。地磁気センサも十分使えることがわかりました。
②原点移動値は、軸を変えると違ってくることがわかりました。
全く違うわけではなくずれる程度ですが、とりあえずこの固定値で
精度検証を行っていきます。
●次に
YAW回転の地磁気だけしかやってませんので
pitch回転、Roll回転のジャイロ、加速度での回転角度精度
と軸が傾いたときにジャイロと加速度と地磁気のデータのどれが精度がよいのかの校正検証をしていきたいと思います。
まだ、雪が降らないのでじっくりとIMU校正をやっていきます。