2か月間 BNO085のyaw角誤差をRTK GPSの高精度パラメータを使って補正する作業をしてきましたが、
最終的に、RTKで大きなオフセット補正を合わせてから、波形内の誤差の最大の外れ値の周波数が4-5Hzである点に注目して、1Hzのローパスフィルタで、元波形をつぶすことで、誤差のレンジを半減近くにすることで終わりとしました。
あとは、2025シーズンで、いろいろな滑走データと比較検証して、妥当な処理か検証します。
●誤差外れ値の波形
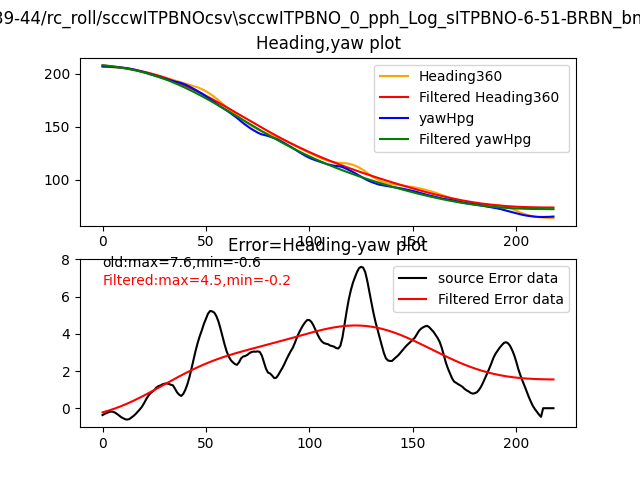
代表的なターンを切り取って、フィルター有無で比較してみると 黒が元波形、赤がフィルタ後波形
上のグラフがHeading角とyaw角のプロットで、200度から80度まで回転してます。CCWなので左ターンです。
下のグラフがheading角とyaw角の差分=誤差をプロットしてあります。
横軸は、時間で、1目盛10msecです。下グラフの黒の波形をみると25-40目盛周期で大きな誤差が発生してます。
これは、Heading角が揺れているのですが、IMUのyaw角はこの揺れを感知してませんので、誤差となってでてきてます。どちらが正しいのかというとHeading角が正しいはずですが、RTKの周期が120msecと遅いため、周期変動が
2-3サンプリングで7度も揺れていることを示してますが、スキー板で方向がそんなに速い周期で変わるのも不自然なので、この大きな外れ値は、基準となるRTK GPS側のノイズだろうと判断して基準波形にローパスフィルタを1Hzカットオフでいれました。そうすると黒線が赤線までなだらかになって、誤差が減少するという結果になります。
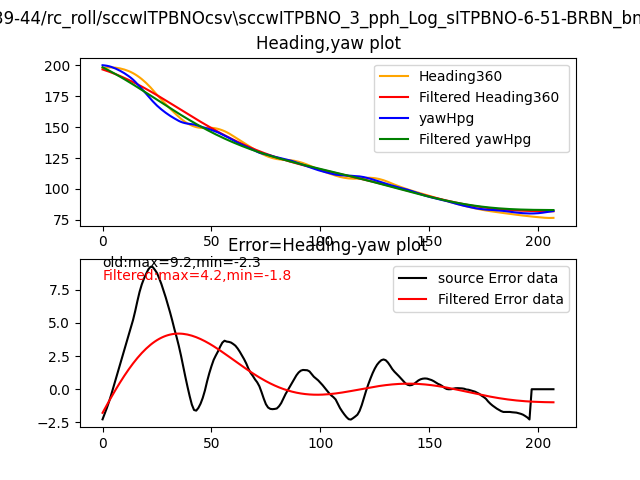
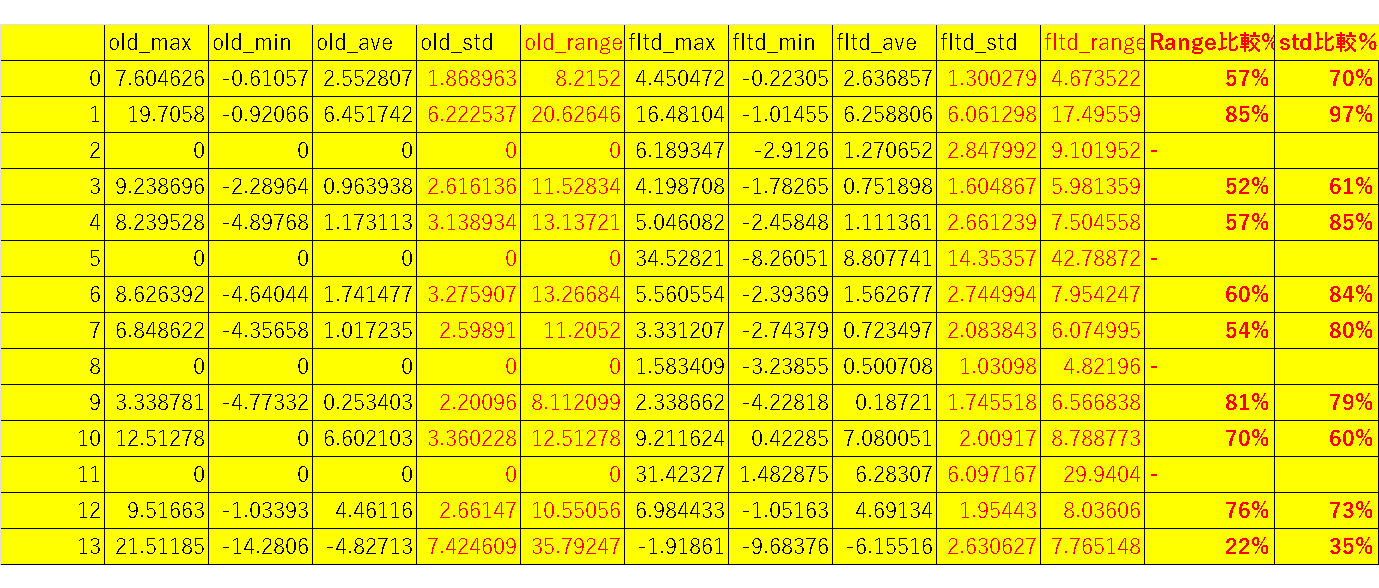
●全体の統計値
抜けが多いのですが、抜け以外のデータをみると50-80%レンジまで縮小してます。
角度範囲でいうと、だいたい±3.5度以内におさまっているものが多いということで、±5-8度だった元波形を
フィルターでつぶして、誤差を圧縮したという結果です。
●ローパスフィルタのやり方はscipyライブラリを使えばバターワースフィルタが簡単にできます。
コードはgistにあります。https://gist.github.com/dj1711572002/f781fc4eb451b36e230616341e6ffc39
シンプルな説明が判り易かったので、こちらのサンプルプログラムをいただきました。作者様に感謝します。
【Python】scipy.signal.butterでローパス(ハイパス)フィルタを作成する
コードは。def LFP(df,coln)にdfとローパスフィルタをかけるカラム名を引数として渡します。
戻り値は、dfに新たに、coln+”_f”とサフィックスがついたフィルター済みカラムが追加されて戻りdfとして受け取れます。フィルタの詳細はわからないので、いろいろな参考サイトがあります。
https://watlab-blog.com/2019/04/30/scipy-lowpass/
|
from scipy import signal
def LPF(df,coln):
print(“df_colnにLowPassFilter処理して、df_coln_fというコラムをつけて戻す”)
#————butter worse————————–
# パラメータ設定
sample_freq = 100
cutoff_freq = 1#1hz固定
filter_order = 4
sec = len(df)*0.01#dfの時間
# —-colnをフィルタ
t = np.linspace(0, sec , int(sample_freq * sec))
y=df.loc[:,coln].to_numpy()
sos = signal.butter(filter_order, cutoff_freq, ‘lowpass’, output=’sos’, fs=sample_freq)
yf = signal.sosfiltfilt(sos, y)
print(yf)
new_coln=coln+”_f”
df[new_coln]=pd.DataFrame(yf)
return df
|
これを使ったlpf処理の機能
ターン毎に分割されたcsvデータファイル群を一個ずつ読んでフィルター処理して、プロット新たにデータとグラフと統計値保存する機能です。
|
elif v==’lpf’:#既存のファイル群をまとめてフィルター処理を追加
print(“low pass filter “)
print(“>>>> SELECT sITP_ _ FILE “)
#headMOtのピークを真の値としてHeading360とyawのピーク高さを合わせることで補正とする
root = tkinter.Tk()
root.withdraw()
iDir = r’C:/RTK_Log/hokan/’
fTyp = [(“BNOデータファイル”, “*.csv;*.xlsx;*.xls”), (“すべてのファイル”, “*.*”)]
filename = FileDialog.askopenfilename(parent=root, initialdir=iDir, filetypes=fTyp)
basenameITP = os.path.basename(filename)
#シリーズファイル群まとめて処理
fsname=csv_Allname(filename)#ファイルシリーズのフル名のソート済みリスト
for i in range (0,len(fsname)):
print(i,”:”,fsname[i])
#==============LPG処理======================================
i=0
list_stat=[]
list_statAll=[]
while i<len(fsname):
print(“====>”,i,fsname[i])
fn=fsname[i]
basename = os.path.basename(fn)
df = pd.read_csv(fn, low_memory=True)
df=LPF(df,”Heading360″)#LowpassFilter関数
df=LPF(df,”yawHpg”)#LowpassFilter関数
print(df.columns)
print(“df[yasHg_f]=”,df[“yawHpg_f”])
df[“H-Ysapg_f”]=df[“Heading360_f”]-df[“yawHpg_f”]
df.to_csv(r”C:/RTK_Log/hokan/LPF/LPF_LOG_”+str(i)+”_”+basename+”.csv”, index=True) # CSV sav
#max min range
old_max=df[“H-Ysapg”].max()
old_min=df[“H-Ysapg”].min()
old_ave=df[“H-Ysapg”].mean()
old_std=df[“H-Ysapg”].std()
old_range=old_max-old_min
fltd_max=df[“H-Ysapg_f”].max()
fltd_min=df[“H-Ysapg_f”].min()
fltd_ave=df[“H-Ysapg_f”].mean()
fltd_std=df[“H-Ysapg_f”].std()
fltd_range=fltd_max-fltd_min
list_stat=[old_max,old_min,old_ave,old_std,old_range,fltd_max,fltd_min,fltd_ave,fltd_std,fltd_range]
list_statAll.append(list_stat)
#plot準備
fig = plt.figure()
x=np.arange(len(df))
yHD0=df[“Heading360”].to_numpy()
yHDf=df[“Heading360_f”].to_numpy()
yyw0=df[“yawHpg”].to_numpy()
yywf=df[“yawHpg_f”].to_numpy()
yHY0=df[“H-Ysapg”].to_numpy()
yHYf=df[“H-Ysapg_f”].to_numpy()
#plot
ax1 = fig.add_subplot(2,1, 1)
fig.suptitle(“LPF_1Hz_”+fsname[i])
ax1.set_title(“Heading,yaw plot”)
ax1.plot(x,yHD0,label=”Heading360″,color=”orange”)
ax1.plot(x,yHDf,label=”Filtered Heading360 “,color=”red”)
ax1.plot(x,yyw0,label=”yawHpg”,color=”blue”)
ax1.plot(x,yywf,label=”Filtered yawHpg”,color=”green”)
plt.legend()
ax2 = fig.add_subplot(2,1, 2)
ax2.set_title(“Error=Heading-yaw plot”)
txt1=”old:max=”+str(round(old_max,1))+”,min=”+str(round(old_min,1))
txt2=”Filtered:max=”+str(round(fltd_max,1))+”,min=”+str(round(fltd_min,1))
ax2.text(x[0],old_max, txt1, size=10,color=”black”)
ax2.text(x[0],old_max-1,txt2, size=10,color=”red”)
ax2.plot(x,yHY0,label=”source Error data”,color=”black”)
ax2.plot(x,yHYf,label=”Filtered Error data”,color=”red”)
#ax2.plot(t,yHY0,label=”HeadingFiltered data”,color=”green”)
plt.legend()
plt.show()
fig.savefig(“C:/RTK_Log/hokan/LPF/PLOT_LPF1Hz_”+basename+”.png”)
i+=1
df_stat=pd.DataFrame(list_statAll)
df_stat.columns=[“old_max”,”old_min”,”old_ave”,”old_std”,”old_range”,”fltd_max”,”fltd_min”,”fltd_ave”,”fltd_std”,”fltd_range”]
df_stat.to_csv(r”C:/RTK_Log/hokan/LPF/LPF_STAT_0-“+str(i)+”_”+basename+”.csv”, index=True) # CSV sav
print()
|
●以後
IMUのyaw角補正は、
0段目:ターンの開始から終わりまでの範囲で処理を行う。
1段目:RTK headMot角のピーク値とyaw角の差分のオフセット補正する
2段目:yaw角を1Hzのローパスフィルタを通す
以上で、誤差が±3度付近まで減少すると思われます。
以降、この補正方法を基準に、
いろいろな滑り方の実験をして、統計的な誤差がどの程度おさまるか検証していきます。