STA24の基本原理として、NutralPoint(方向転換点)ではheadMot角(速度ベクトルの方角角)とheading角が一致するはずという原理があるはずということでIMUのyaw補正のアイデアがありました。
●原理通りでない事象
headMotの振幅とHeading角、yaw角の振幅が前者が小さく、後者が大きいというデータしかでませんでした。
何故、振幅が違うのか、理解しがたかったのですが、Python時系列グラフ解析でいろいろいじってみると
左右ターンを比較して理由が判りました。
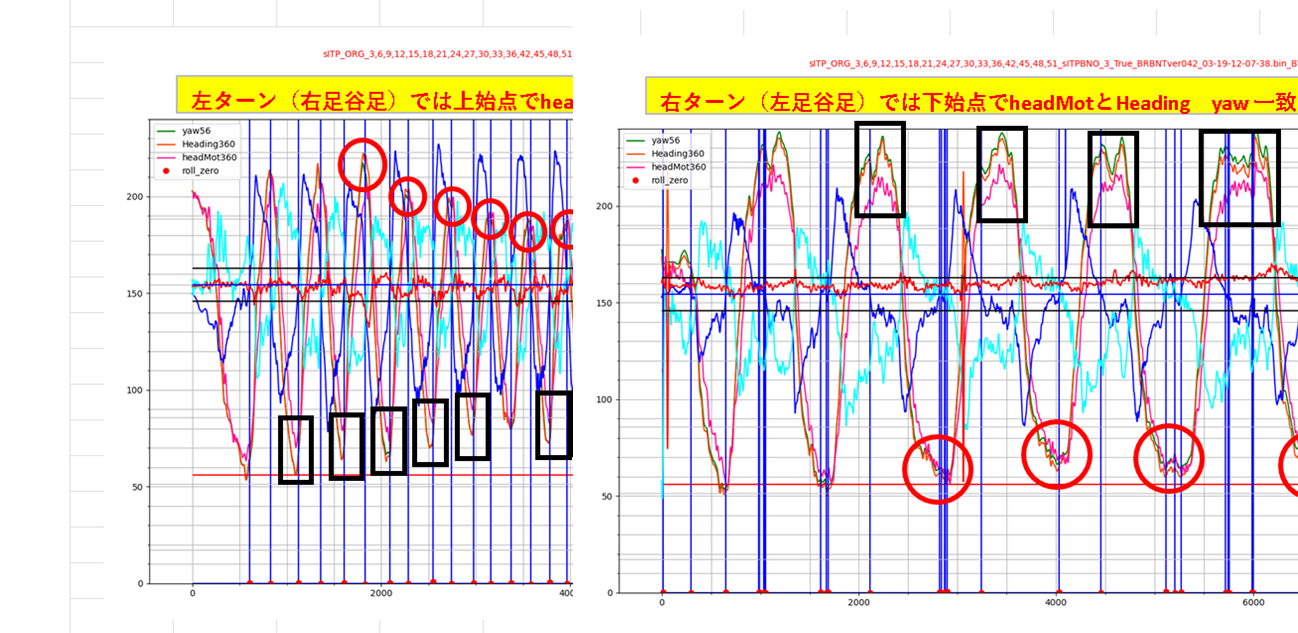
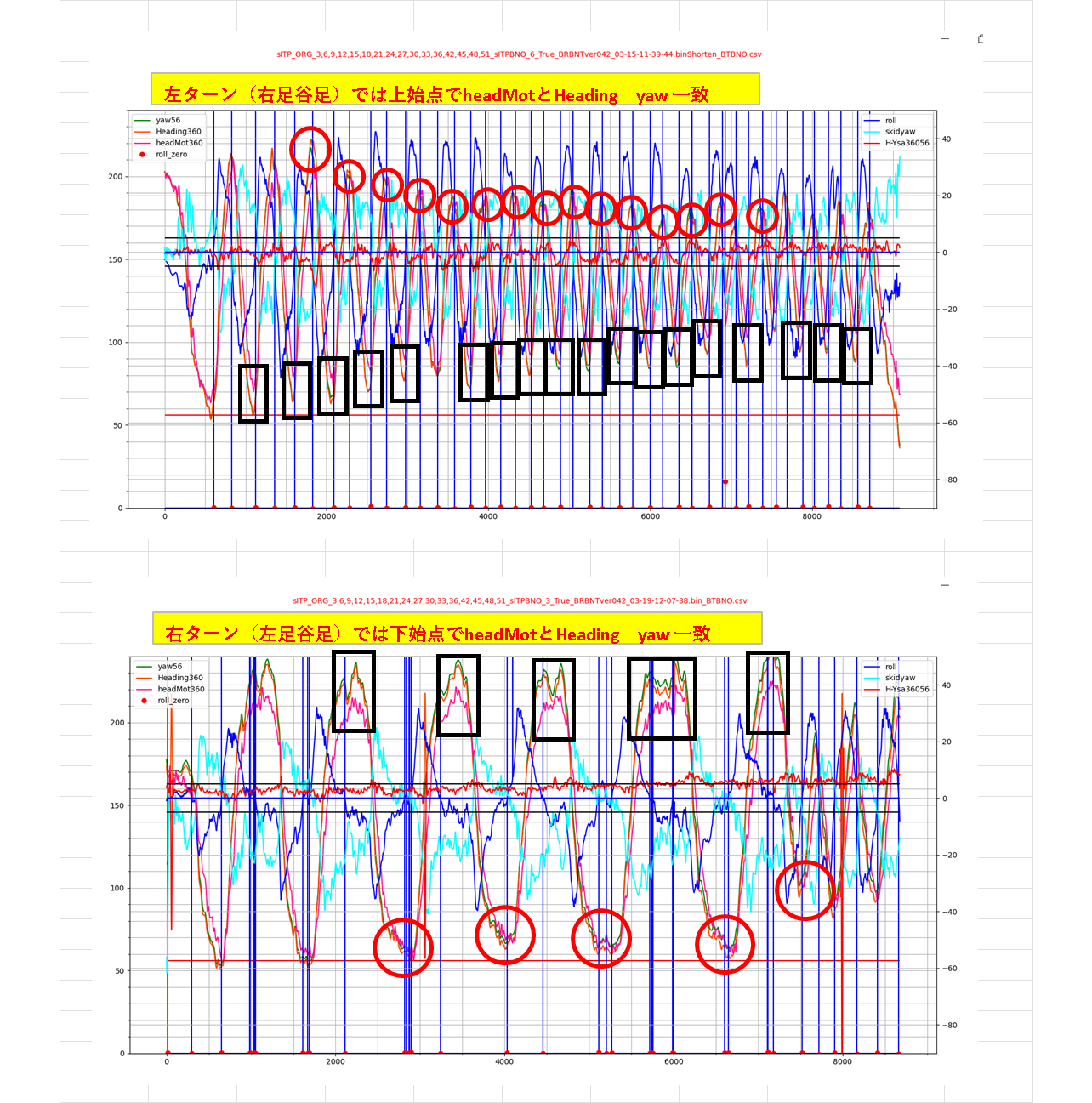
下図で、headMot (ピンク)Heading(赤) yaw(緑)でサインカーブを描いてますが、
上から下へ降りる線は、左ターンです。
・上空から見て角度が時計回りなので、角度が減っていく方向が左ターン 増えていく方向が右ターンです。
結果1:左ターンでは、上始点でheadMotとHedingとyawが近傍で一致しますが、次の下始点では一致しません
結果2:右ターンでは、下始点でheadMotとHedingとyawが近傍で一致しますが、次の上始点では一致しません
●理由
これは、スキー板の踏み方の違いです。
谷足で踏ん張るときは、板の方向と進行方向が一致しないとターンの制御が効きません。
しかし、山足ターンの場合は、板の方向と進行方向は、谷足メインで任せてあるので、次のプルークのために山板の方向を準備しているため進行方向とは異なるということが理由だと思います。
すいう踏み方をしているから、このようなグラフになるということが判りました。
ですので、人によって、これは違ってきますので、
上手な人がパラレルターンすれば山と谷 両方つかってターンしますので、このような差異はでないと思います。
●使ったデータとプログラム
時系列プロットでExcel的にいろいろいじりながらプロットするプログラムを作りました。
右足使ったデータ: pph_time_sITP_ORG_3,6,9,12,15,18,21,24,27,30,33,36,42,45,48,51_sITPBNO_6_True_BRBNTver042_03-15-11-39-44.binShorten_BTBNO.csv
右足pgm https://gist.github.com/dj1711572002/dc327e4ddceaaf6c0c32b93505589e9d
左足使ったデータ:pph_time_pph_rollzeroppr_3,6,9,12,15,18,21,24,27,30,33,36,42,45,48,51sITPBNO_3_True_BRBNTver042_03-19-12-07-38.bin_BTBNO.csv
左足pgm https://gist.github.com/dj1711572002/02f9ee67b53647ebac083c09b2483d07
●やり方
プログラムスタートで
①’r’キー:BRBNTファイルを読み込む
②’ho’キー:10msec補間データsITPファイル群(3peak毎にばらして複数個ファイル群で補間)
③’ppr’キー:PairPlotで見たいセット番号を合体させたグラフとcsvを作成
④’pph’キー:PairPlotで補間の様子を見るためのプロットでpprで作成したファイルをプロットして手作業で条件変更
●以後
スキーデータを詳細に眺めていく場合、原理としてこうあるべきだという観点でデータの状態を眺めることが重要です。