2時間測定しただけですが、そのデータを処理するのに、何日もかかるので、
狙い目の部分だけ、取り出して結果を見てみました。今回は、右スキーだけで様子をみましたが、このシステム構成をシンプルにしても大丈夫な所感がでたので、左スキーは、MovingBaseの代わりにBNO055nのIMU FUISONでスキーの姿勢角を測定する仕様で制作します。
=>狙いとは、スキーの傾きの切り替え点とスキーのニュートラル点が一致しているということです。傾きなのでpitch rollだけ見てます。yaw角は、ばらつきが多く、意味不明のばらつきをするので、BNO055のyaw角は使えないと思ったほうがよいです。
※10か月後 BNO055を捨てて、BNO085へ乗り換えました。BNO085だと2σ5度以内でyaw角がでるので、RTKと組み合わせれば
2-3度精度になるので、使えるようになるはずです2024スキーシーズンで、BNO085の実証をしていきます。
【STA23】姿勢センサに秋月のBNO055を試す<ファーム改良版BNO085に乗り換え>
=>BNO055はファームウェアのオートキャリブレーションがバグってます。突然オフセットしたりして20度くらいずれてしまいます。BOSCH社も認識しているようで、BNO055を止めて
CEVA社に次期製品を任せて、BNO08XXシリーズでファームウェアの欠陥を修正したバージョンを製品にしてます。本来なら、不良品で回収すべきレベルのバグでした。
私の被害は、8か月間BN0552個につきあわされて1シーズンパーになりましたから、欠陥ファーム製品は、怖いです。ファームなので、仕様にはでてこないので、欠陥がみえないので
ファーム製品は、要注意です。
※6か月後の結論として磁気センサを使ったFusionモード(NDOF)でのyaw角の精度が高角速度、小回転半径で
10-20度ずれてしまうことが判明しました。スキーの場合でも、初心者ならyaw角精度がでますが、上級者、選手の滑りだとyaw角精度がでないということになります。pithc rollは、磁気センサを使ってないので、精度よいです。
2024年スキーシーズンからは、yaw角がネックなので、磁気センサの代わりにGyroセンサを使って、角速度を1回積分して回転角を出すことで、スキー板の方位角を得る方法に変更します。

●全体のデータ
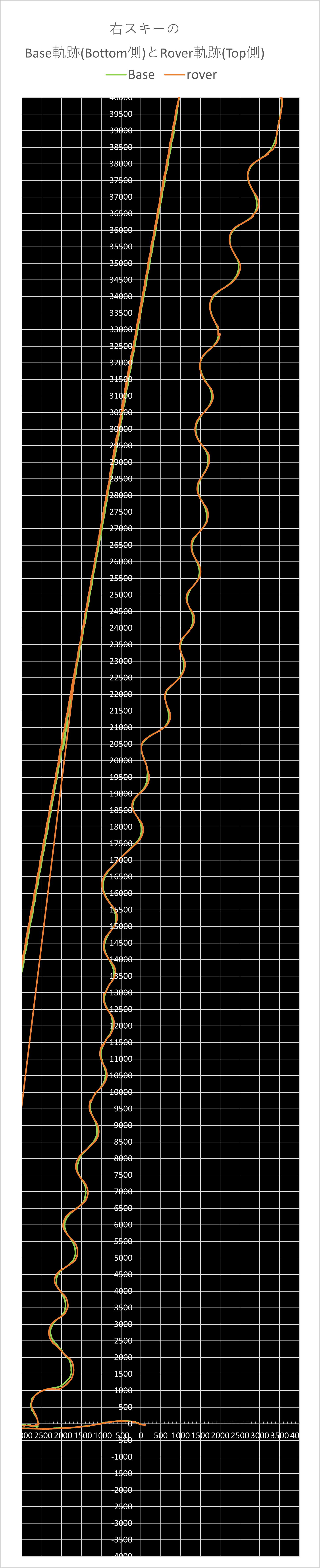
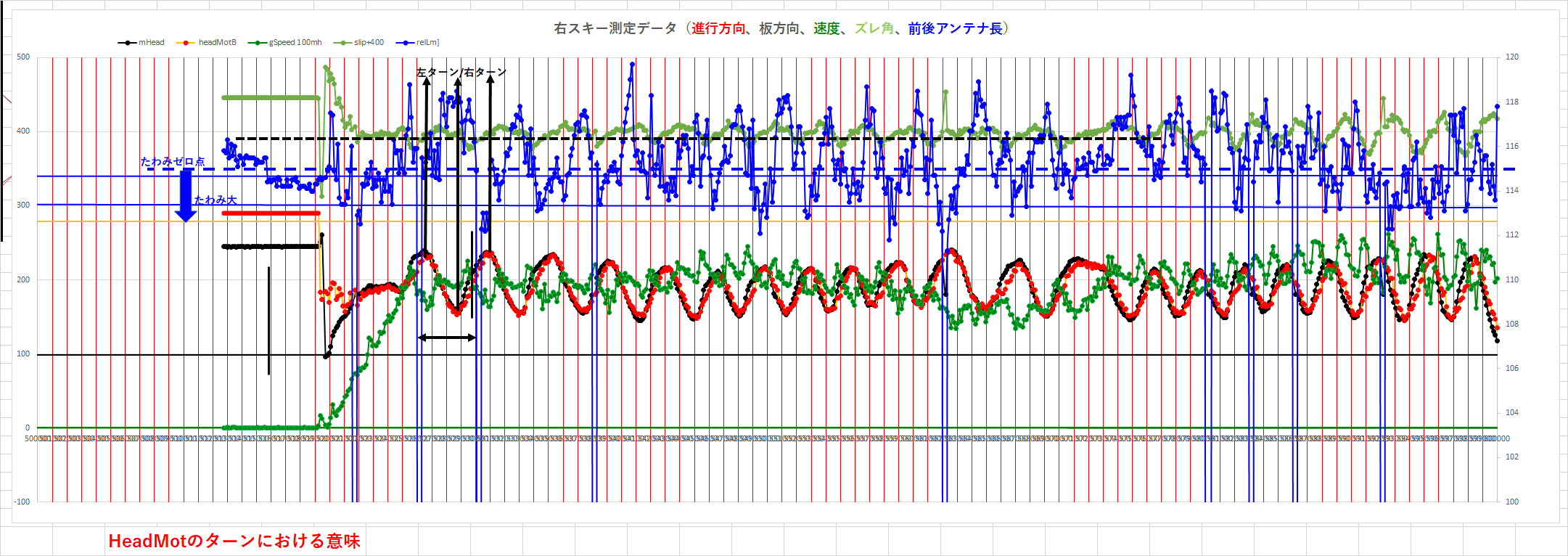
RTKのスキーのトレースのXY図(南北図)は、基本ですが、時系列グラフで、運動ベクトル方向のheadMotと板の角度Heading角とYaw角、速度、板の傾きPitch角、MovingBaseのLengthで板のわわみ具合を見ることが狙い目です。
●STA23狙い5個
狙い1)2021、2022年の測定データと同様にターンの横滑り、NutralPoint(切り替え完了点)がキチンとでているかととりあえずの結果
=>過去データと同様に、でてます。
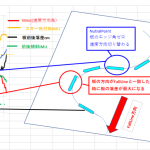
■STAの基本の確認
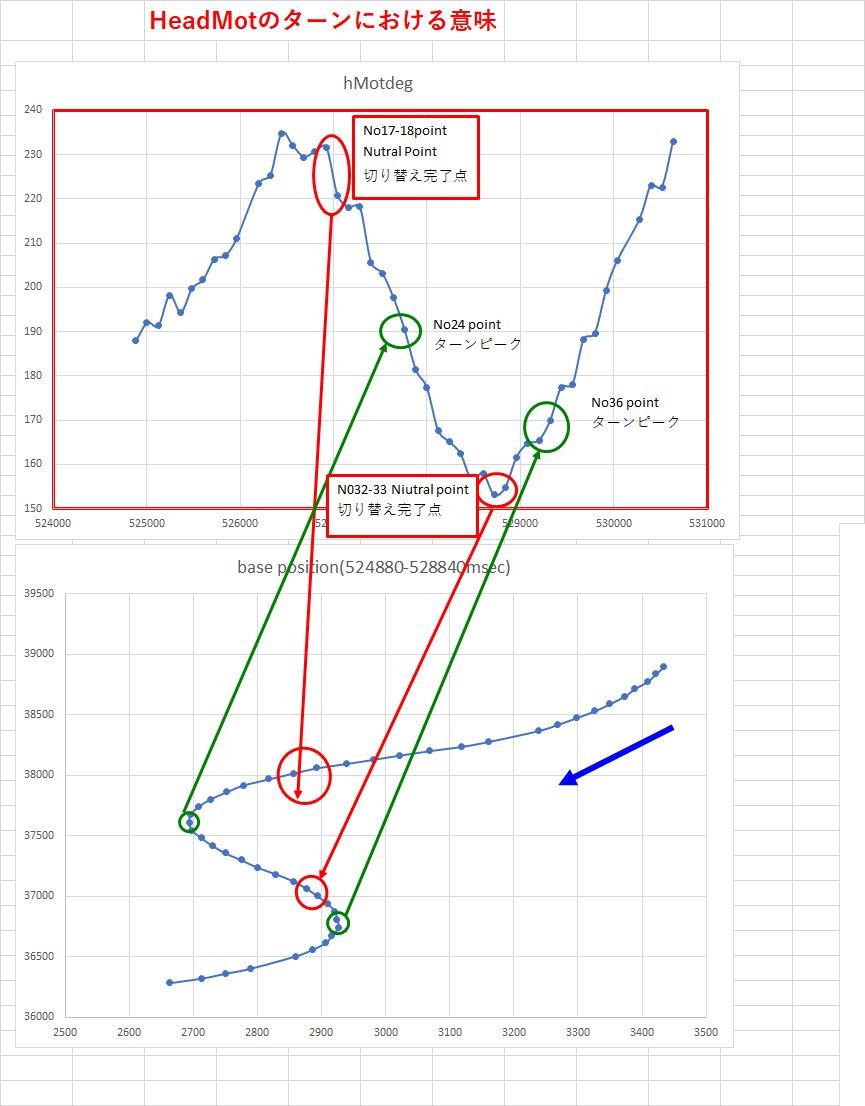
①headMot(進行方向ベクトル角)のピークがNutralPointとしてターンの切り替え位置を表してます。
②headMotに対して、スキーのHeading角の差分がSLIP角として、横ずれ角を示してます。
ターンの前半は、横滑り角が外向きにでてることがわかります。
ターン後半は、横滑り角が内向きにでています。
これは、テクニックと雪面状況によって違います。
※3月11日追記 2回目の測定結果で、BNO055のYAW角のずれが10度も出ている現象が定常化していて
とてもRTKに匹敵する精度がでないことが分りました。姿勢角がずれていると姿勢座標で、加速度、重力方向も出力されるのでIMU全データが狂っていることになります。姿勢角を修正するだけで済むのか、全データに何らかの補正をしないといけないのか検討します。2千円のセンサと5万円のRTKの精度比較しても無理かと感じてます。
狙い2)データロス率が2021年は、数%と悪かったが、2023年では、改善できたか?
=>ミス率 0.55%(76個/16399個)30分測定しても0.55%で、
アンテナの受信状態が悪いときに、F9Pの出力タイミングが遅くなって、マイコンが読み飛ばしてしまう現象が多いです。今回は、雪でアンテナ埋もれていたり、振動で接触が怪しくなったりした原因が考えられます。机上でのロス率は、0.003%くらいです。
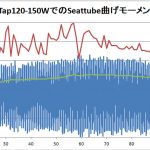
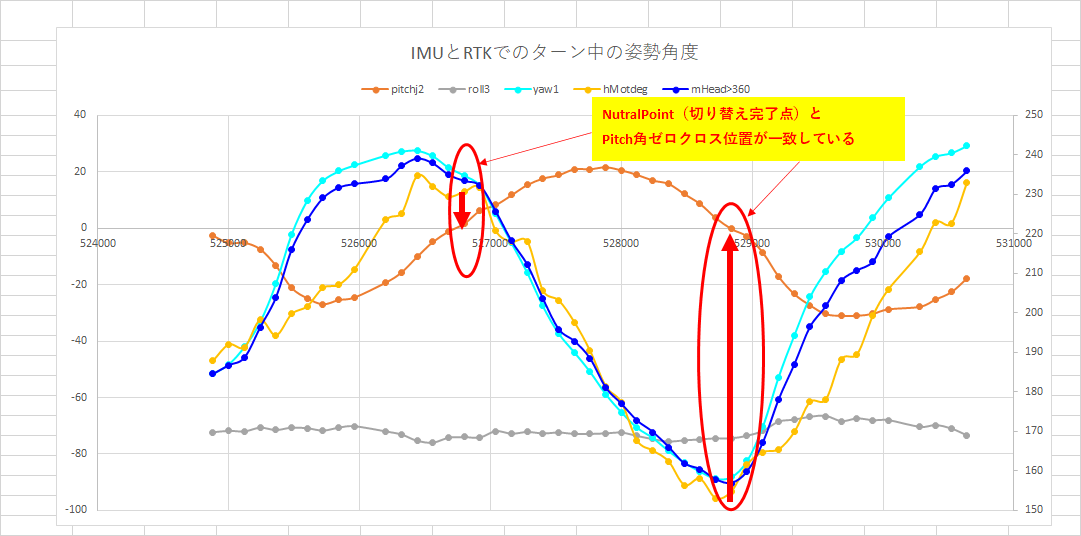
狙い3)IMU FusionのYAW角精度が、MovingBaseのHeading角度に対してどの程度追従できているか、pitch(roll)角がスキーターンでの板の傾きとして測定できているか。
=見事にでてました。yaw角精度は、これからN増しして、統計的にばらつきだします。
NutralPoint(hMotのピーク)で、スキーの角度(pitchとPgm内で呼んでいるが物理的にはroll)も切り替えでゼロ点を通過しているのが分かります。
切り替えのテクニックがターンの大きなポイントなので、これが重要です。
MovingBase Heading角(青線)とIMU yaw角(水色線)の対比をみると、左ターンの時は、ほぼ一致してますが
右ターンの時が大きくずれてますこの原因として怪しいのはレガースに仕込んであるIMUの方向のずれが右ターンの時だけ発生するのではないかと疑ってます。左足のシステムも作って2個の差で検証実験していきます。

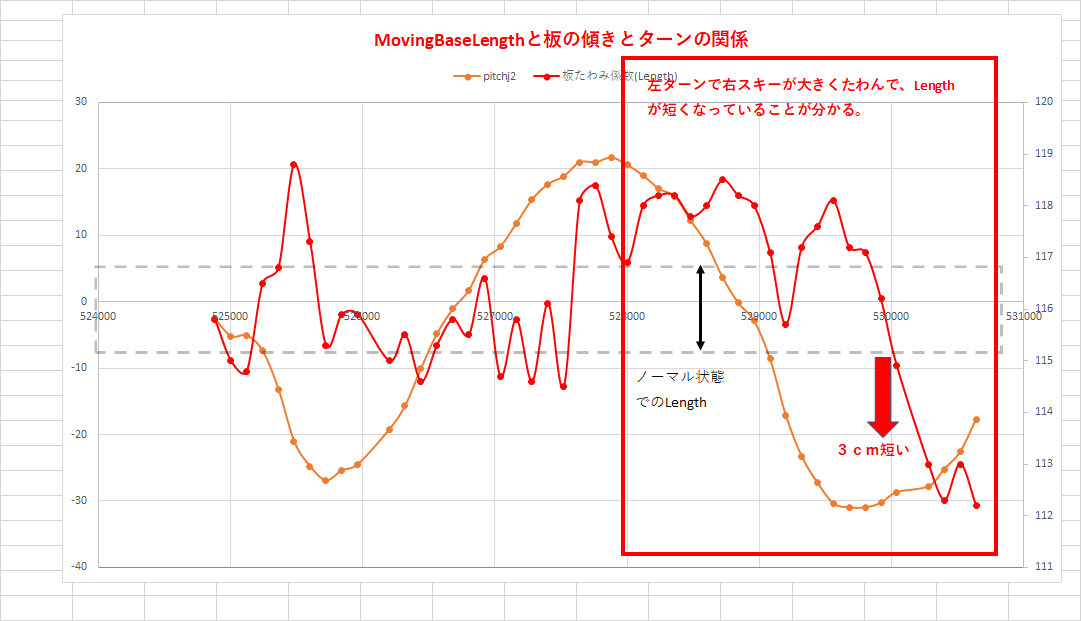
狙い4)板がたわむとMovingBaseのLength(前後のアンテナ間距離)が短くなる現象がみれるか
=>見えた。板の傾き角とheadMotのタイミングで、Lengthが最大3cm短くなってました。
●以後
左足を月末までに作って、3月から回数を増して、データ大量に測定します。
テストモニターしたい方は、コメント欄にオファーいれてください。
平日北志賀高原のよませスキー場で測定してます。
狙い5として、M9Nの補完で25Hz位置測位も実験していきます。
※2023年6月28日追記
スキーシーズンが終わって、回転治具を作ってRTKとBNO055の基礎実験をしてます。
BNO055を回転させて、定点に停止させる実験を繰り返していると方位角(yaw)がずれてきます。
速度が速く、変動が激しい回転のさせ方をすると20度くらいずれてしまいます。これは、磁気センサとのFusion計算が動きに追従できてないことだと思います。磁気センサの仕様が20Hzですので、遅い変化しか測定できないということだと思います。回転運動の数値だと遠心力G1.5G以上、角速度1000dps以上になると大きな誤差が発生します。=>結論として、磁気センサを使わないyaw角は使わないことにしました。yaw角の代わりのGyroのZ軸を使うと精度は、1回転で、±6度くらいで、速度とか角速度が大きくても安定したばらつきで回転角が得られます。
角度の基準をGPS RTKで得て基準位置でGYROデータをリセットして使うことで、180度回転で±3度程度の測定はできそうですので、スキーのMovingBase Heading角精度±1度の対して±3度程度でBNOが使えるということになります。
※2月27日追記
解析用プログラムが進捗して、いろいろ見えるようになりました。
その中で、BNO055が運動時から静止して、次に運動すると4-5度ドリフトする現象を発見しました。 スキーのRTKの場合は、RTK角度で、補正して使えばつかえますが、BNO単独だと
ドリフトしたら、大変ですので、注意が必要です。自動キャリブレーションの影響だと思いますが、記事はこちらです。