//==================================================
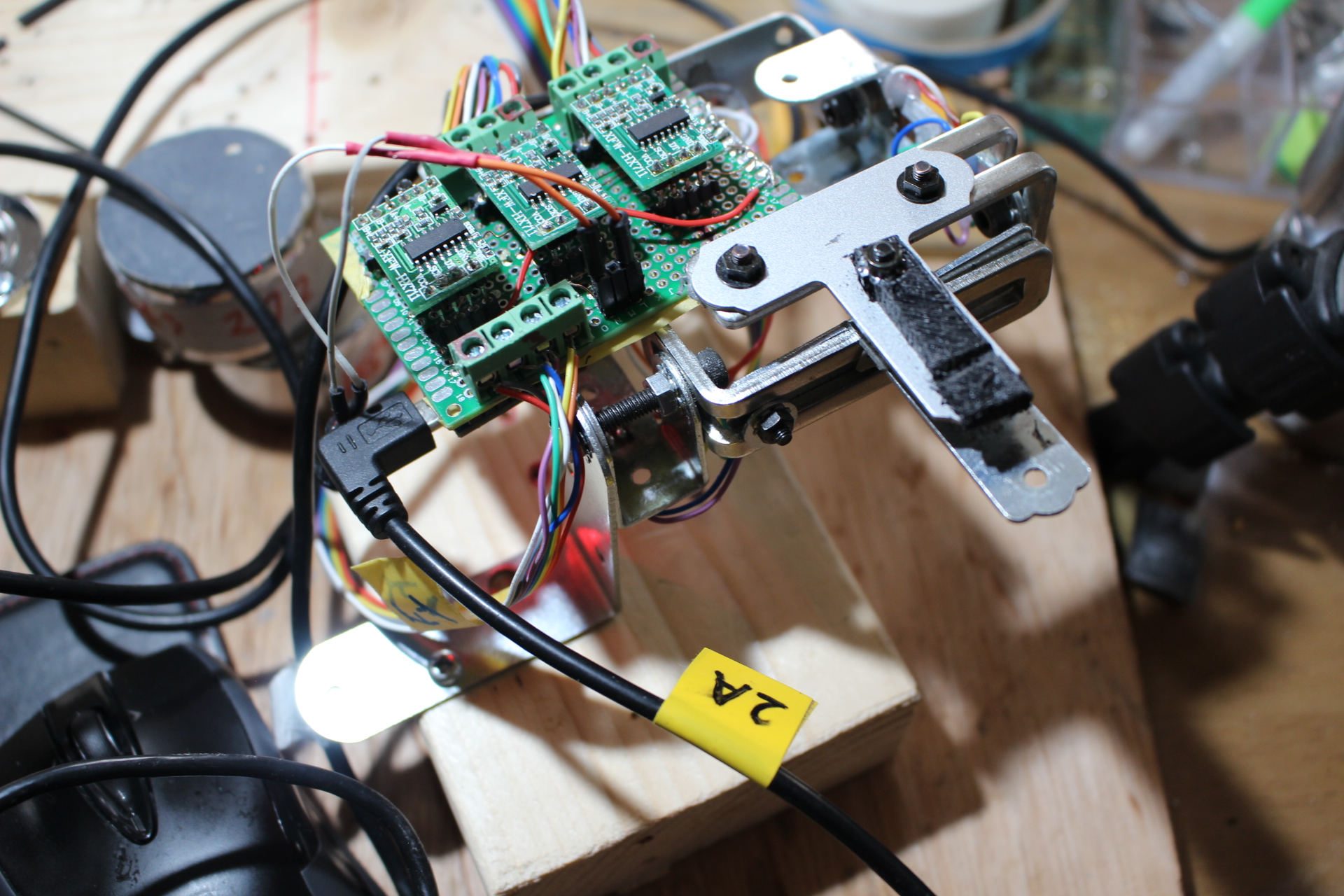
// BiteMouse (カムマウス)WS1プログラム rev021
// Arduino Pro micro互換 中華Pro Micro ATmega32U4 5V/16MHz
// 使い方は、下記リンクを参考にさせていただきました。
//https://ht-deko.com/arduino/promicro.html
// 原理:3軸センサでFxがカーソルの左右 Fzで上下移動座標ですが、
// 1:FzとFyの組み合わせで上下方向していしてます。
// 2:FxとFzの合力ベクトルの大きさでカーソルの速度を加速させてます。
//====================================================#include <Mouse.h>
#include <HX711.h>
int Fx;
int Fy;
int Fz;
int Fx_1;
int Fy_1;
int Fz_1;
int gainxN=1;
int gainzN=1;
double vector;
HX711 scale;
HX711 scale2;
HX711 scale3;
//Variables
double gainx=1;
double gainz=1;
int Fxr;
int Fyr;
int Fzr;
void setup() {
Serial.begin(38400);
// initialize mouse control:
Mouse.begin();
//HX711 initialize Sub
Hx711_setup();
}
void loop() {
Fx_1=Fx;
Fy_1=Fy;
Fz_1=Fz;
Fx=int(scale.get_units());//HX711 Fx read
Fz=int(scale2.get_units());//HX711 Fz read
Fy=int(scale3.get_units());//HX711 Fy read
Fxr=abs(Fx)-abs(Fx_1);//相対座標X
Fyr=abs(Fy)-abs(Fy_1);//相対座標Y
Fzr=abs(Fz)-abs(Fz_1);//相対座標Y
// ===========vector値で加速係数変化===================
vector=sqrt(pow(Fx,2)+pow(Fz,2));
Serial.print(vector);
Serial.print(“——–“);
Serial.println(gainxN);
if (vector>=10){
gainxN=20;
gainzN=8;
Serial.print(vector);
Serial.print(“——–“);
Serial.println(gainxN);
}
if (vector<10){
gainxN=1;
gainzN=1;
}
// ===Fy値が前押し(マイナス)ならFzの方向を逆転=======
if (Fy<0){
gainz=-1;
}
if (Fy>=0){
gainz=1;
}
//===============================================
Serial.print(Fx);
Serial.print(“,”);
Serial.print(Fz);
Serial.print(“,”);
Serial.print(Fy);
Serial.print(“,”);
Serial.print(Fz*gainz*gainzN);
Serial.print(“,”);
Serial.print(Fx*gainx*gainxN);
Serial.print(“,”);
Serial.println(gainxN);
//Serial.print(“,”);
//Serial.println(Fyr);
if (abs(Fx)>2 || abs(Fy)>2) {
Mouse.move(Fx*gainx*gainxN,Fz*gainz*gainzN,0);
}
}
void Hx711_setup(){
Serial.println(“Initializing the scale”);
// parameter “gain”is ommited; the default value 128 is used by the library
// HX711.DOUT ? pin #A1
// HX711.PD_SCK ? pin #A0
scale.begin(A3, A2);//Fx
scale2.begin(A1,A0);//Fz
scale3.begin(A9,A8);//Fy
Serial.println(“Before setting up the scale:”);
Serial.print(“read: \t\t”);
Serial.println(scale.read()); // print a raw reading from the ADC
Serial.println(scale2.read()); // print a raw reading from the ADC
Serial.println(scale3.read()); // print a raw reading from the ADC
Serial.print(“read average: \t\t”);
Serial.println(scale.read_average(20)); // print the average of 20 readings from the ADC
Serial.print(“read average2: \t\t”);
Serial.println(scale2.read_average(20)); // print the average of 20 readings from the ADC
Serial.print(“get value: \t\t”);
Serial.println(scale3.read_average(20)); // print the average of 20 readings from the ADC
Serial.print(“get value: \t\t”);
Serial.println(scale.get_value(5)); // print the average of 5 readings from the ADC minus the tare weight (not set yet)
Serial.print(“get value: \t\t”);
Serial.println(scale2.get_value(5)); // print the average of 5 readings from the ADC minus the tare weight (not set yet)
Serial.print(“get units: \t\t”);
Serial.println(scale3.get_value(5)); // print the average of 5 readings from the ADC minus the tare weight (not set yet)
Serial.print(“get units: \t\t”);
Serial.println(scale.get_units(5), 1); // print the average of 5 readings from the ADC minus tare weight (not set) divided
Serial.print(“get units2: \t\t”);
Serial.println(scale2.get_units(5), 1); // print the average of 5 readings from the ADC minus tare weight (not set) divided
Serial.println(scale3.get_units(5), 1); // print the average of 5 readings from the ADC minus tare weight (not set) divided
// by the SCALE parameter (not set yet)
scale.set_scale(2280.f); // this value is obtained by calibrating the scale with known weights; see the README for details
scale.tare(); // reset the scale to 0
scale2.set_scale(2280.f); // this value is obtained by calibrating the scale with known weights; see the README for details
scale2.tare(); // reset the scale to 0
scale3.set_scale(2280.f); // this value is obtained by calibrating the scale with known weights; see the README for details
scale3.tare(); // reset the scale to 0
Serial.println(“After setting up the scale:”);
Serial.print(“read: \t\t”);
Serial.println(scale.read()); // print a raw reading from the ADC
Serial.print(“read2: \t\t”);
Serial.println(scale2.read()); // print a raw reading from the ADC
Serial.print(“read average: \t\t”);
Serial.println(scale.read_average(20)); // print the average of 20 readings from the ADC
Serial.print(“read average2: \t\t”);
Serial.println(scale2.read_average(20)); // print the average of 20 readings from the ADC
Serial.print(“get value: \t\t”);
Serial.println(scale.get_value(5)); // print the average of 5 readings from the ADC minus the tare weight, set with tare()
Serial.print(“get value2: \t\t”);
Serial.println(scale2.get_value(5)); // print the average of 5 readings from the ADC minus the tare weight, set with tare()
Serial.print(“get units: \t\t”);
Serial.println(scale.get_units(5),1); // print the average of 5 readings from the ADC minus tare weight, divided
// by the SCALE parameter set with set_scale
//Serial.print(“get units2: \t\t”);
Serial.println(scale2.get_units(5), 1); // print the average of 5 readings from the ADC minus tare weight, divided
// by the SCALE parameter set with set_scale
Serial.println(“Readings:”);
} |