モーメントを正確に負荷する方法として、フォースプレート上の座標目盛り位置に錘を置くことで、MxMyのクロストークの出ない位置を決めてキャリブレーションしました。
●やり方
CrossBeam上に200x200の百斤のMDFボードを固定して5mmピッチの同心円を印刷した紙を貼って座標軸を作って単四電池12gを載せて、重力による微小なモーメントをMxMyとしてセンシングさせてキャリブレーションしました。


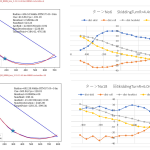
●MxMyキャリブレーションデータ
中心から20mm位置から10mmずつ外周へ向けて電池を置いて測定していきます。それをX軸、Y軸、XY軸45度中間軸と3水準で測定して理論モーメント値と測定digit値をキャリブレしました。


このグラフ値を読んでEXCELで直線回帰しました。
曲げ方向での戻りドリフトが2-3digitあるため、小荷重では
直線性が悪くなりますが、それでもR=0.9976以上はでてました。
X軸のほうは0.999と優秀でした。ゲージ貼り付けの平行度もきいてると思います。

■MxMyの中間位置での確認
X軸Y軸の中間45度位置の載せた時の計算をしてみましたが合ってますので、6分力計のMxMyとして使えると思います。


●Mzのキャリブレーション
MxMyが終わってからMzをキャリブレをやってみました。
まずテンションゲージでど真ん中を押してMzがゼロレベルにいる位置を確認します。数ミリ左側にずれてました。
押す傾きも結構ききますので、テンションゲージの目盛りでは判断がつかないので、CPLT上の青線Mxの値を200digitになるようにテンションゲージをおしました。原理上Mxの値は、Mzの押す位置では変化しない一定値になりますので、基準値として使えます。

90mm左まで10mm間隔で押していきます。

\
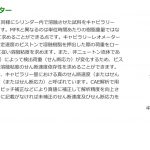
このグラフをは下記です。
青線のMxをみながらテンションゲージを押してます。

このデータを読んでEXCEL上で直線回帰します。

このグラフでは、うまくとれてますが、除荷後なにもしてないのに大きなドリフトが発生しました。MzをCrossBeamでの側面を利用して測定しているためのドリフトなのか、ゲージ配線上のノイズなのか未だ分かりませんが、Mzは、もう少し詰めていく必要がありそうです。
●コト作りの発想がでてきました。
ロードセル、多分力センサも、研究者が自作する時代になる予感がいたします。STLデータをダウンロードして造形してひずみゲージを貼ればできてしまいますので、数十万円もしてなおかつ、研究に必要な仕様にぴったり合ってないセンサを購入する時代は、十年後は無いなと感じてます。ロボットハンドの力覚センサを見た瞬間に直観したのは、ロボットの開発者が全部自分で開発設計できないので、パーツ、デバイスを購入して自分のロボットに取り付けますが、パーツとデバイスは規格化された製品ですので必ずしも、目的のロボットハンドに適合しているとは限りません、本来ならロボット設計者がセンサも自作するのがベストなのです。未来は、開発者が重要部品は自作する時代になると思います。そういうコト作りを想定して本開発を推進してます。
●以後
3Dプリントで作ったロードセルでも、そこそこの直線性がでることがわかりました。金属製との差も大差ではないと思います。
CrossBeam MxMyは、完成したと判断して、TS1は終了とします。TS2としてFxFyFzのためにロバーバル式の試作を始めます。Mzは、最適な測定方式を検討します。