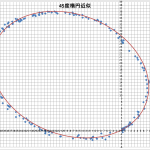
GPSの原理を知らない素人からスタートしてChtGPTに教えてもらいながら、2か月で生の衛星受信データと衛星位置情報からドップラー計算をおこなって、回転治具で速度ベクトルをもとめて、積分して位置をだしてRTK測位位置と比較して±2cm以内となりました。
●ドップラー測位のメリット
1. アンテナ・受信システムのメリット
-
シンプルなハード構成
位相追尾や多周波が不要な場合もあり、比較的安価な受信機・アンテナで利用可能。 -
小型アンテナでも機能
高精度な基準局との差分補正を前提にしなくても、単体で速度精度を確保できる。 -
ダイナミックレンジに強い
移動体の高速運動や加減速に追随しやすい。
2. ロケーション性能の強み
-
絶対位置より相対運動に強い
絶対的な位置(緯度・経度)ではRTKに劣るが、速度や相対位置変化はドップラが非常に安定。 -
高サンプリングが容易
10~100Hzクラスで連続補間でき、ターンや瞬間的な加速を捉えやすい。 -
遮蔽に比較的強い
位相アンビギュイティ解決が不要なので、ビル影や樹木下でも速度は維持しやすい。
3. 運動特性でのメリット
-
高精度速度 → 積分で位置補間
iTOW揃え&始終点補正を入れれば、RTK欠測区間をドップラだけで数 cm 精度で繋げる。 -
リアルタイム応答性
RTKで再解決待ちする時間ロスを回避し、連続した軌跡を得やすい。 -
高ダイナミクスに強い
スキーターンのような1秒以下の高速曲線運動でも形状を逃さない。
4. 実利用での利点
-
簡単に導入できる
RTK基地局が不要な状況でも「高精度相対速度」を活かせる。 -
既存システムの冗長性強化
RTKが途切れた時のバックアップ測位に最適。 -
小型ドローン・スポーツ計測に適用可能
軽量・低消費電力で搭載できる。
👉 まとめると、
「RTKほど複雑でなく、単独測位よりはるかに精度の高い連続軌跡を得られる」
という立ち位置でアピールできます。