スキーに部実装し終わったので、配線のチェックとプログラムデバッグ始めました。
何故、実装後からプログラムデバッグになるのかは、スキー板という狭い空間に実装するために
基板と配線の変更がたくさんあるので、ハード上の変更が完了してから、プログラムデバッグとなったわけです。
基本動作は、正月に机上でUcenterで確認済みなので、1Base-2Roverは、動作することは確認ずみですが、
実装状態となるとRTCM信号線のノイズなどが心配なので、慎重に実装基板で、机上動作しました。
●動作確認作業の準備と手順
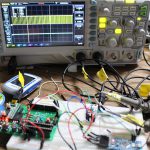
①スキーの実装状態から基板セットを外して机上で動作確認をします。
②スキーとは別に3本のアンテナを室内窓際に設置します。窓際でも40db以上が6個程度は受信できるのでfloatでデバッグします。
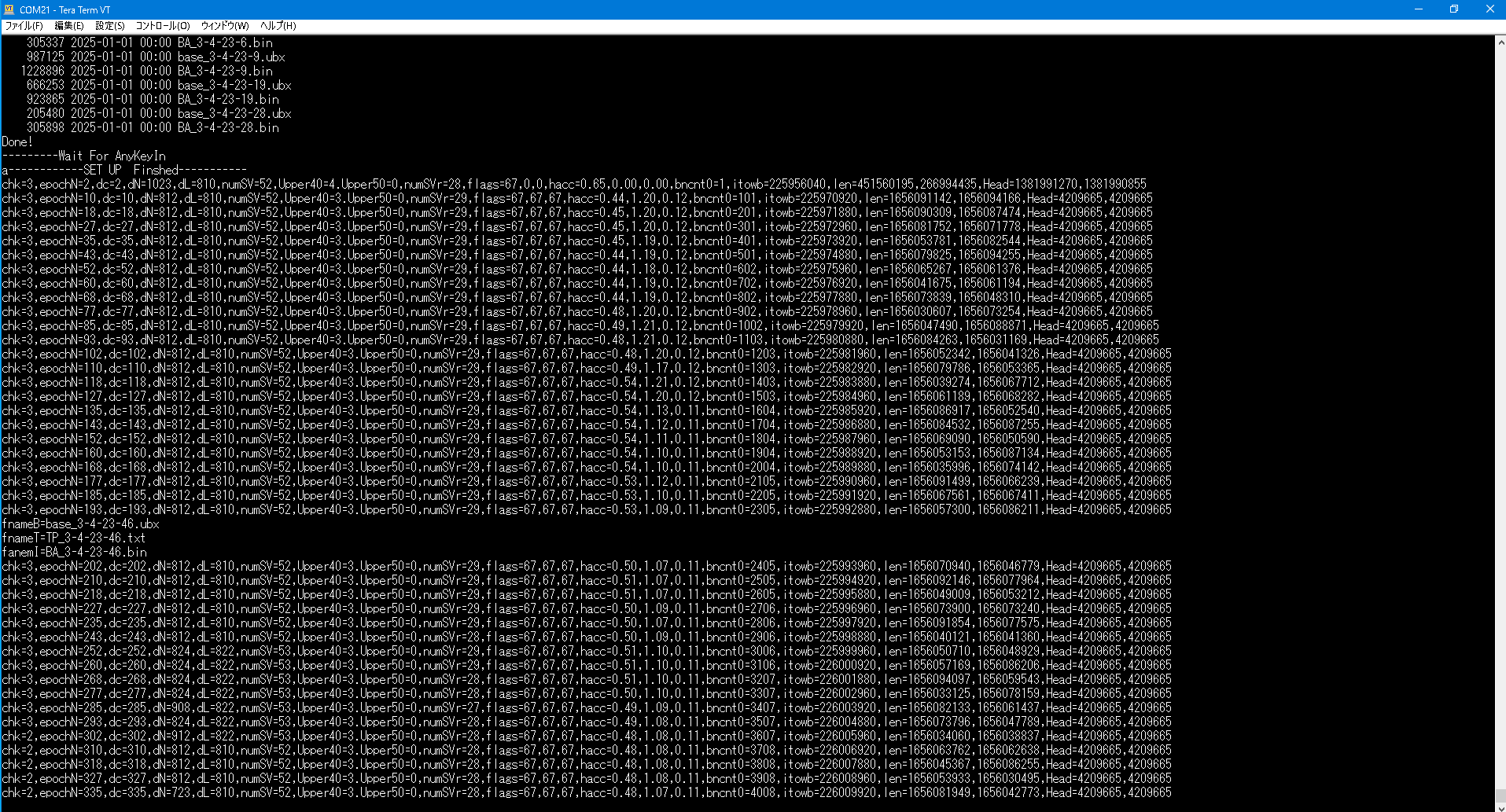
=>RTKプログラムデバッグに何故アンテナが必要かというとF9Pからのバイナリーデータを解読してまともな変換ができているかを
デバッグするためには、精度外れでも意味ある数値が得られるバイナリーデータ受信が必要だからです。例えば、flagsとかhaccなど
RTKの品質を見るパラメータは、モニタしながらデバッグするときのRTKデータをみる目安のなります。
③F9Pの設定ファイルが正常かucenterで確認
使いまわしていると時々F9Pの設定が飛んでしまうことがあるので、ucenteにつないで、最終確認をします。
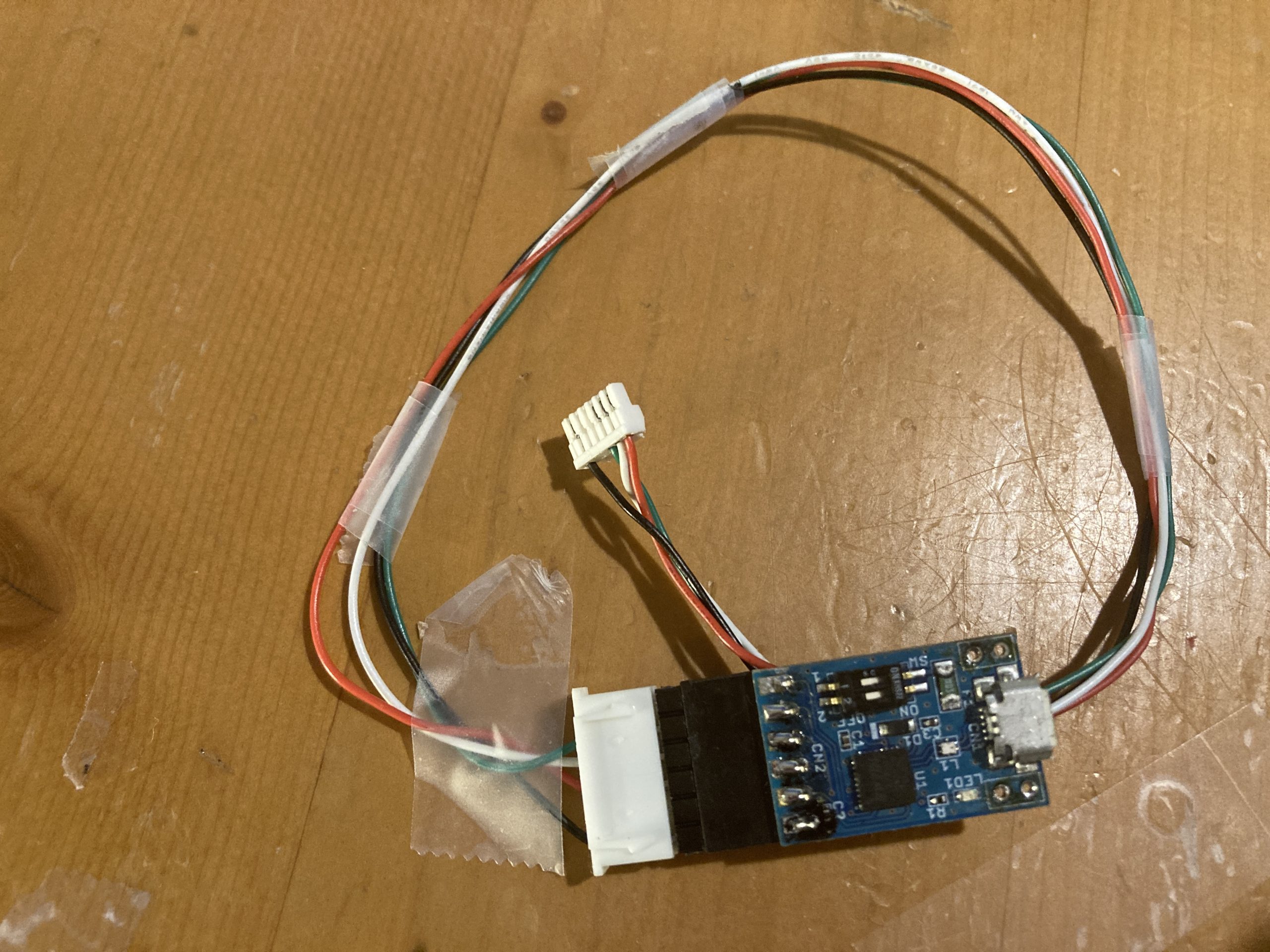
BaseはUSBケーブル接続ですが、Roverは、UART出力なので、USBシリアルモジュールでUSB変換してucenterで確認します。
F9P設定方法は正月の記事にあります。
UART1接続には、PixhawkコネクタとUSBシリアルモジュールを接続した結線でUcenterで見ます。
作り方は、こちらの記事。
④Base基板の動作確認です。単体動作させるために、USBケーブルで接続してUcenterで確認します。
⑤Rover基板単体も同様にucenterで動作確認
⑥MovingBase動作チェック
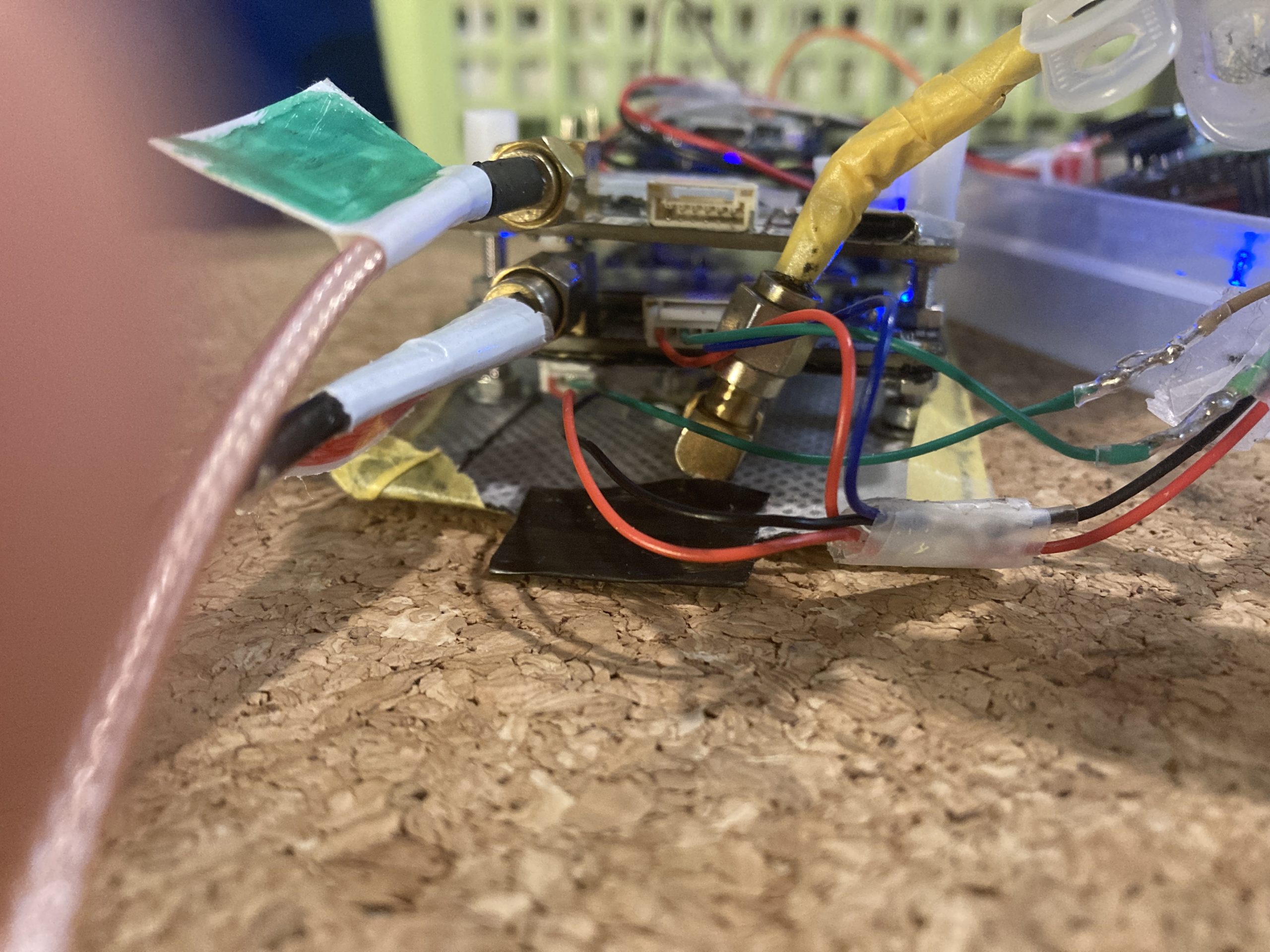
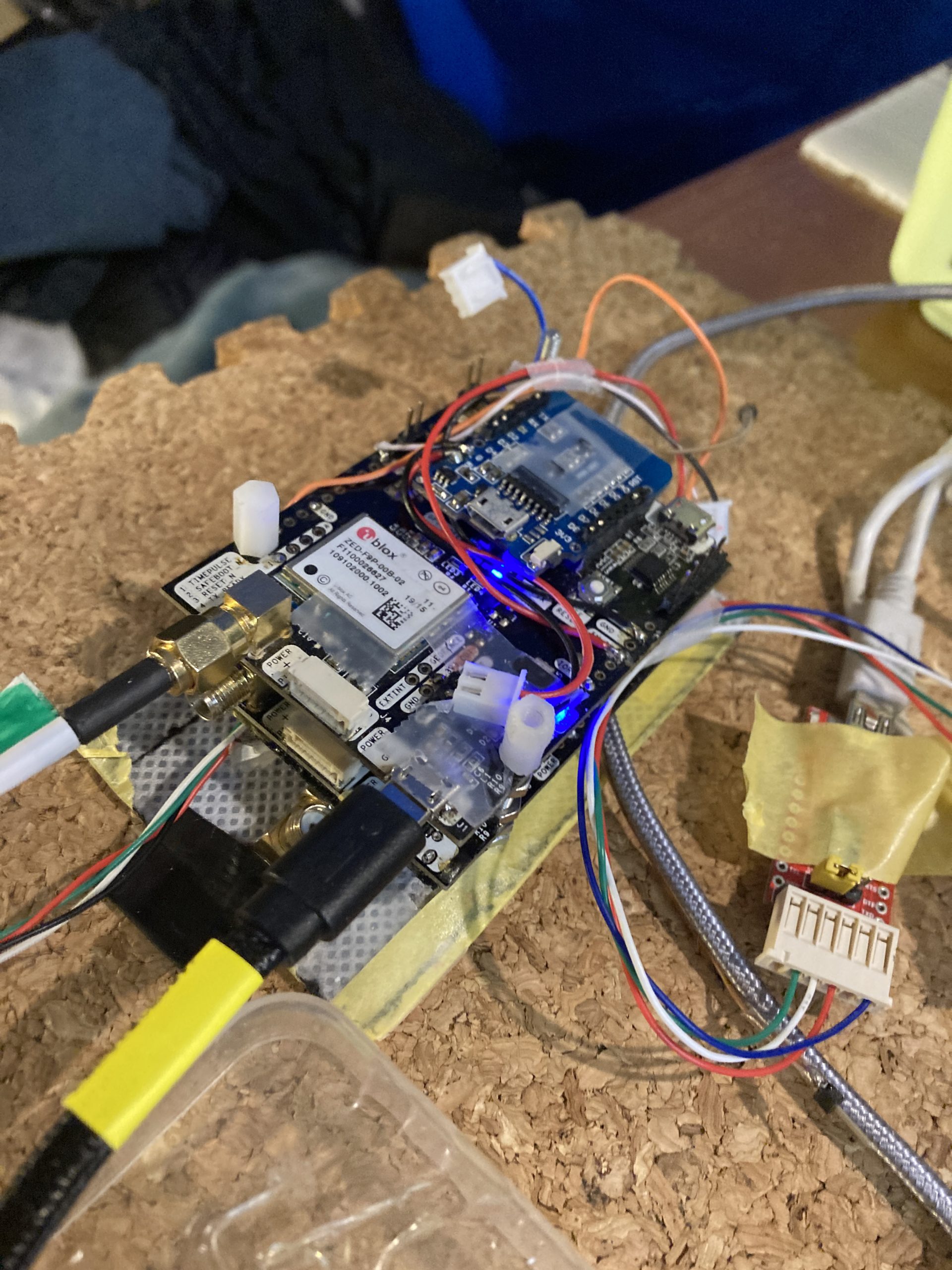
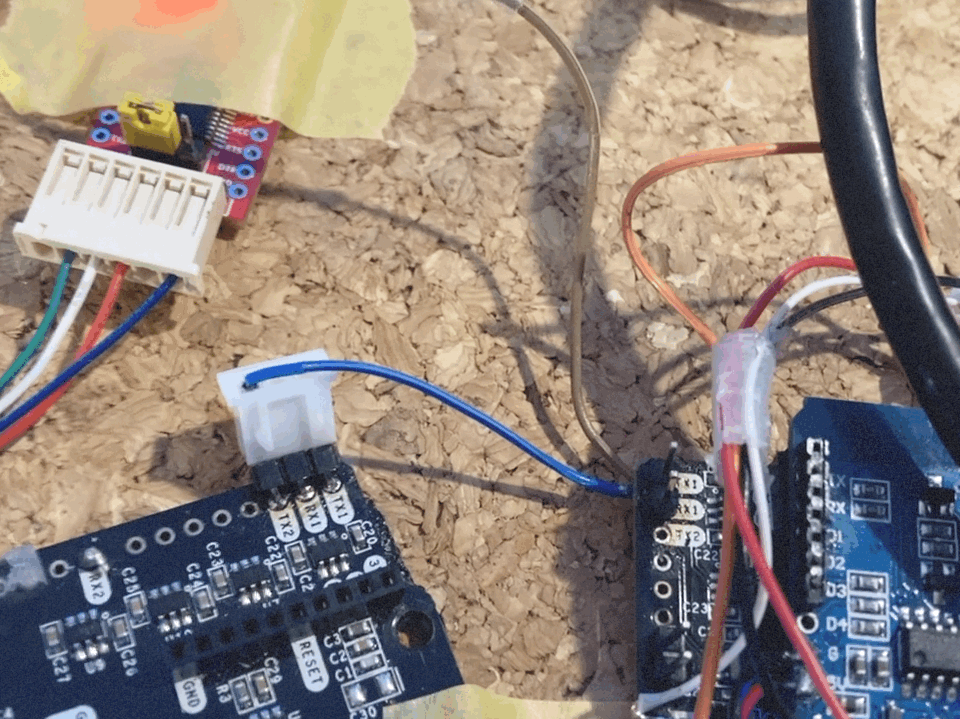
=>実装配線で、SimpleRTK2BのMovingBaseが動かなくなった
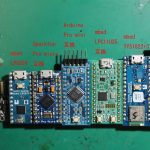
写真のTX2のピンが実は、送信ポートでなく受信ポートになってました。今までは、基板上にあるXbeeコネクタのTX穴に差し込んでいたのですが、高さを低くするために、基板上のスルーホールにRTCM3信号をいれることにしたので、最初はRX2ホールにつないでいたのですが、全然動かないし、RTCM3線を2又に接続するとRoverが暴走するというアクシデントに見舞われるという酷い目にあいました。
単体で一から動作確認したら、このピン名称と機能の違いがみつかりました。Ardusimple社が、何を勘違いしたのか、イレギュラーな名称をつけてます。ちなみにTX1は出力ピンでした。
⑥1Rover2Base確認
⑦マイコンと接続して、データ送受信確認
プログラムは、GISTにあります。https://gist.github.com/dj1711572002/897363146082aca96109c0134584d81a