STA25期限が迫っていますが、プログラム作りで1か月遅れてますので、雪解けが危ない状態になってます。
最悪春スキーのアライに行って測定することになるかもしれません。
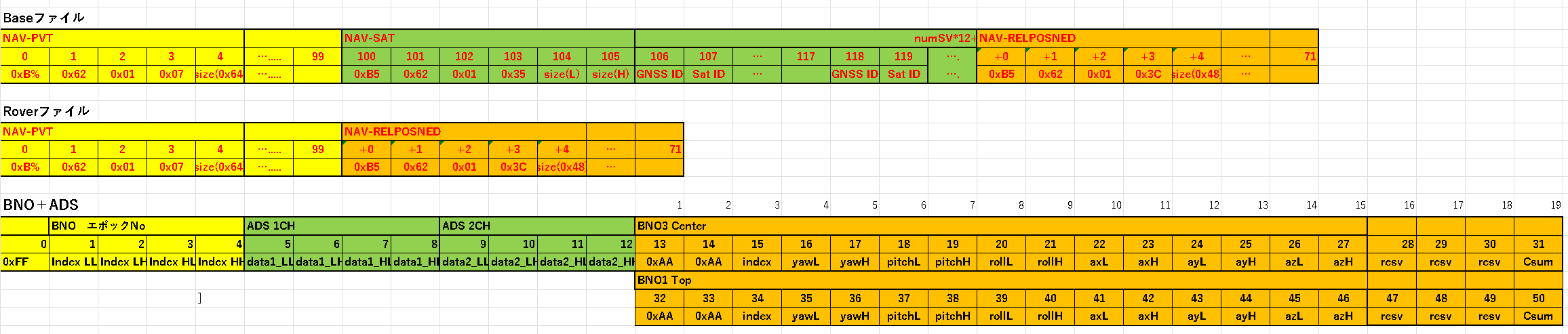
●3ファイルのデータ項目
| データ項目 | |
| base_MM_dd_hh_mm.bin | NAV-PVT,NAV-SAT,NAV-RELPOSNED 572~1132byte(100byte+400~960byte+72byte) 周期120msec |
| rov_MM_dd_hh_mm.bin | NAV-PVT,NAV-RELPOSNED 172byte 周期120msec |
| BA_MM_dd_hh_mm.bin | ADS1CH,ADS2CH,yaw,pitch,roll,
ax,ay,az x2個分 CenterとTopにBNO085を設置します。 |
これらをリアルタイムにログしてモニター情報をBlueToothでながします。モニターの周期は1秒に一回にしました。余計な仕事なので
できるだけ軽くする方針です。STA24以前は、モニタで凝った情報を計算していたのですが、ST25からは、後処理をPythonでやるので
バイナリーの生データさえSDカードに保存されていればPythonで自在に処理できるので、マイコン側の処理プログラムを軽くする方針に変えてます。
●容量は、1分間で1MByteログがたまるのです。スキー1本で20分くらいで20MByteと大きなファイルになります。

●フォーマット

●プログラム備忘録
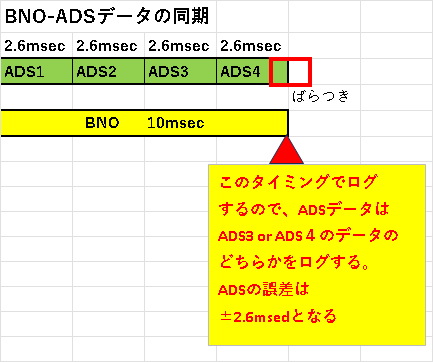
①BNOとADSデータの同期
ADSのサンプリング1200Hzでサンプリングしてますが、2CHを切り替えながらAD変換しているので、
実質380Hz 2.6msec周期になります。しかも±1msecほどばらつくので、BNOと同期をとるのが大変になります。
そこで、BNOの10msecを基準にして、BNOが10msecになった時点でのADSの保持データをその時点でのひずみ値と
することにしました。ADSのサンプリング誤差は、±2.6msecでます
。
●プログラムソース
複数タブでプログラムを見やすくしました。ライブラリーとして.hという名前をつけてます。
しかし、SD書き込み、割り込み処理部は、メインにいれておかないと動作しにくいのでメインが大きいです。
STA25_BASE_SD_BNOx1_0853_rev06
●以後
Roverは、未だ取り付けてないので、配線します。全体の同期をTimePulseで行うのですが、後処理で同期させたほうが
マイコン側の処理負荷が軽いので、どうやるか工夫します。1月中に3Dプリントケースと防水センサケースを開始して
2月末までに、テスト滑走しようと思います。