年末目標でシステムを完成させようとしていたのですが、家事が忙しく1か月遅れとなってます。
●STA25でのRTKシステムは、1Base2Roverが目玉です。
スキー板の中央にBaseアンテナを設置して、先端(TOP)と後端(TAIL)にアンテナを設置する
3本アンテナで、前後でのターン弧の軌跡の違いを計測します。
ベランダの手すりに、板につけたアンテナ3本を結びつけて、実験用アンテナセットを設置します。
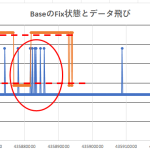
壁から1mしか離れてないので、マルチパス影響がでるので、最高精度で安定FIXすることはありませんが
デバッグ用には使えます。

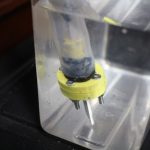
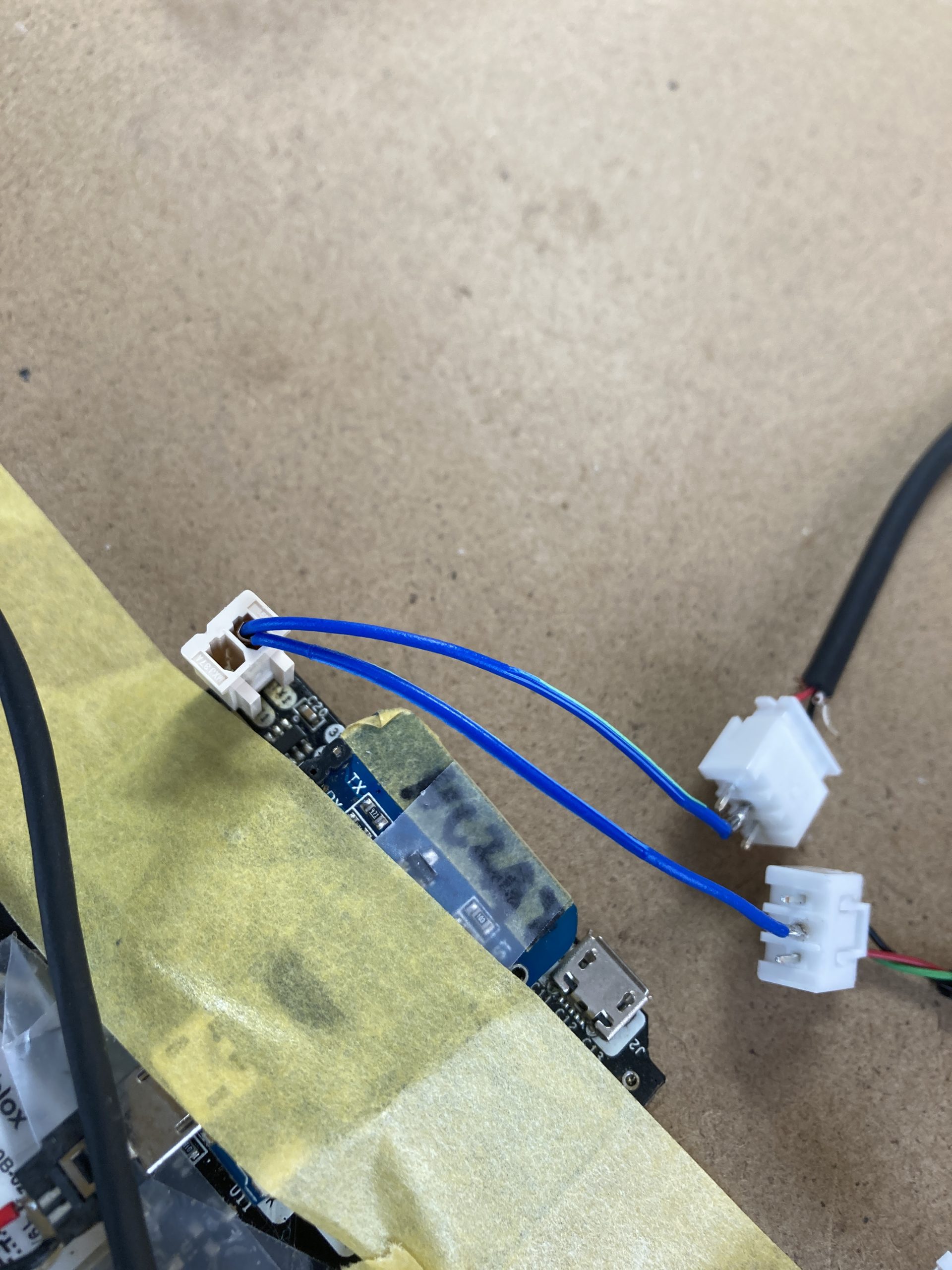
仕掛けは、BaseのRTCM3出力信号をTOPとTAILのRoverに2股分岐で送信することです。
青い線をコネクタから2本だして、TOPとTAILのRoverへ接続します。

●Ardusimple社のMovingBaseのBase用ConfiguraitonFileが無くなっている
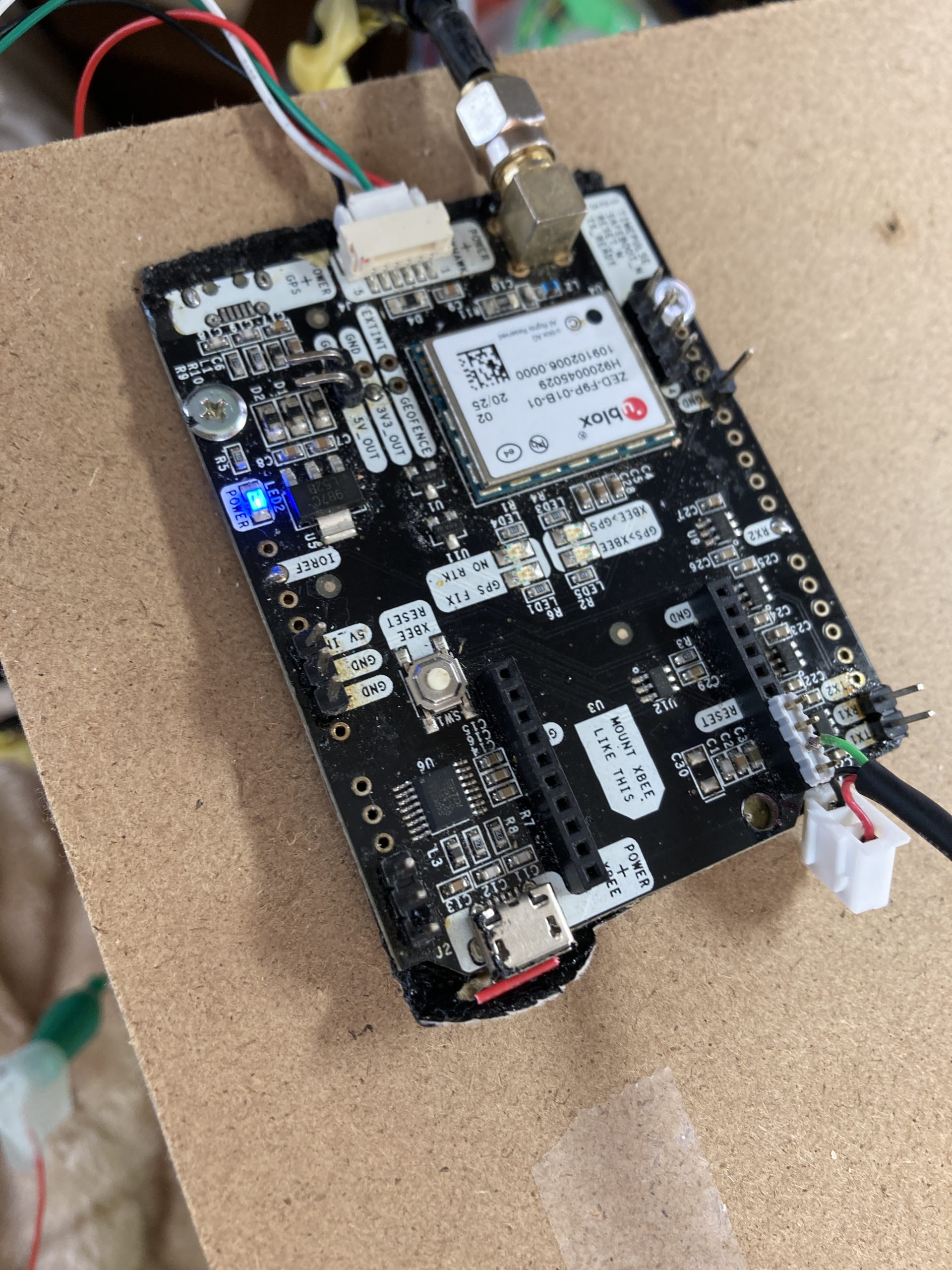
この3年MovingBaseのRoverには、F9H基板を使っていたので、SimpleRTK2B基板だけで
MovingBaseを組むので、ファームとConfigurationFileの再インストールを行いました。
Firm Version;HPG1.32 で統一しました。周期が8Hzと遅いのですが、UART2のOUTが出来るので
HPG1.13では出来なかった基線長計測ができます。
Configuration:これが、3年前だとMovingBase専用のファイルがArdusimpleのHPに置いてあったのですが、
無くなってました。昨年からRTK業界のリストラが始まって、各社サービスの縮小をおこなってます。
Ardusimple社は、USER FORUMを閉じて、事業所も引っ越して人員削減してます。
ですので、MovingBase関係のサポートファイルも消えてます。
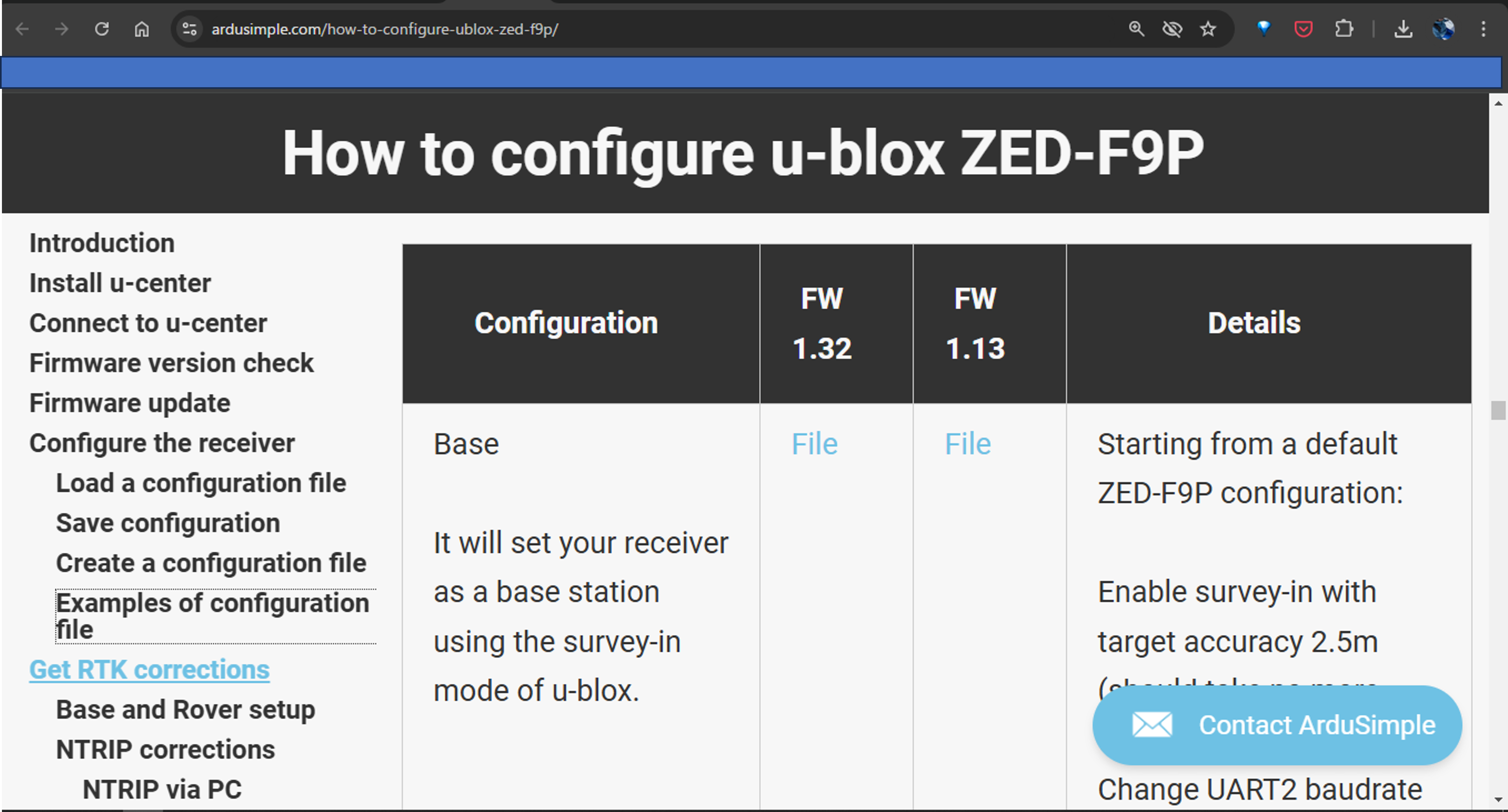
BaseのConfigurationFile1個だけしかないので、それをダウンロードします。
https://www.ardusimple.com/how-to-configure-ublox-zed-f9p/
最近のHPは、超初心者でも扱い易いような構成に切り替わっていて、アドバンスユーザーには
参考にならない記述ばかりです。細かな設定の解説はありません。質問を直接してくれと書いてあります。
ユーザーと直接接することで、ビジネスを開拓していく方針に変更したみたいです。
=>しょうがないので、一般的なBaseファイルをダウンロード
このページの一番下のほうにサンプルファイルがあります。1.32のBASEファイル右クリック保存します。
simpleRTK2B_FW132_Base-00.txt
https://www.ardusimple.com/wp-content/uploads/2022/09/simpleRTK2B_FW132_Base-00.txt
●ここから、ハマって2日がかりでMovingBaseを設定しました。
過去記事が大事です。 【RTK21】RTKの無線化その1<BaseとRoverの通信内容>
①BaseのUART1 TXから信号でない問題
今までのMovingBase専用BaseConfigurationファイルだと
NAV-CFG-PRTでUART1のOUTにRTCM3 460800と設定してあるのですが
このBaseファイルで同様の設定をしても、UART1のTXピンから信号が全く出力されません。
原因;PRTの設定だけでは、IOの設定だけで、MSGが登録されてないので何もでません。
従来のConfigファイルだとMSGも登録されてあったので、何もしないで良かったのですが
MovingBaseに必要なMSGを全部手動で登録しなければなりません。
準備1:UbloxのHPから、MovingBaseアプリノートをダウンロロード
https://content.u-blox.com/sites/default/files/documents/ZED-F9P-MovingBase_AppNote_UBX-19009093.pdf
ここで、MovingBaseで使うRTCM3のメッセージファイルをさがします。
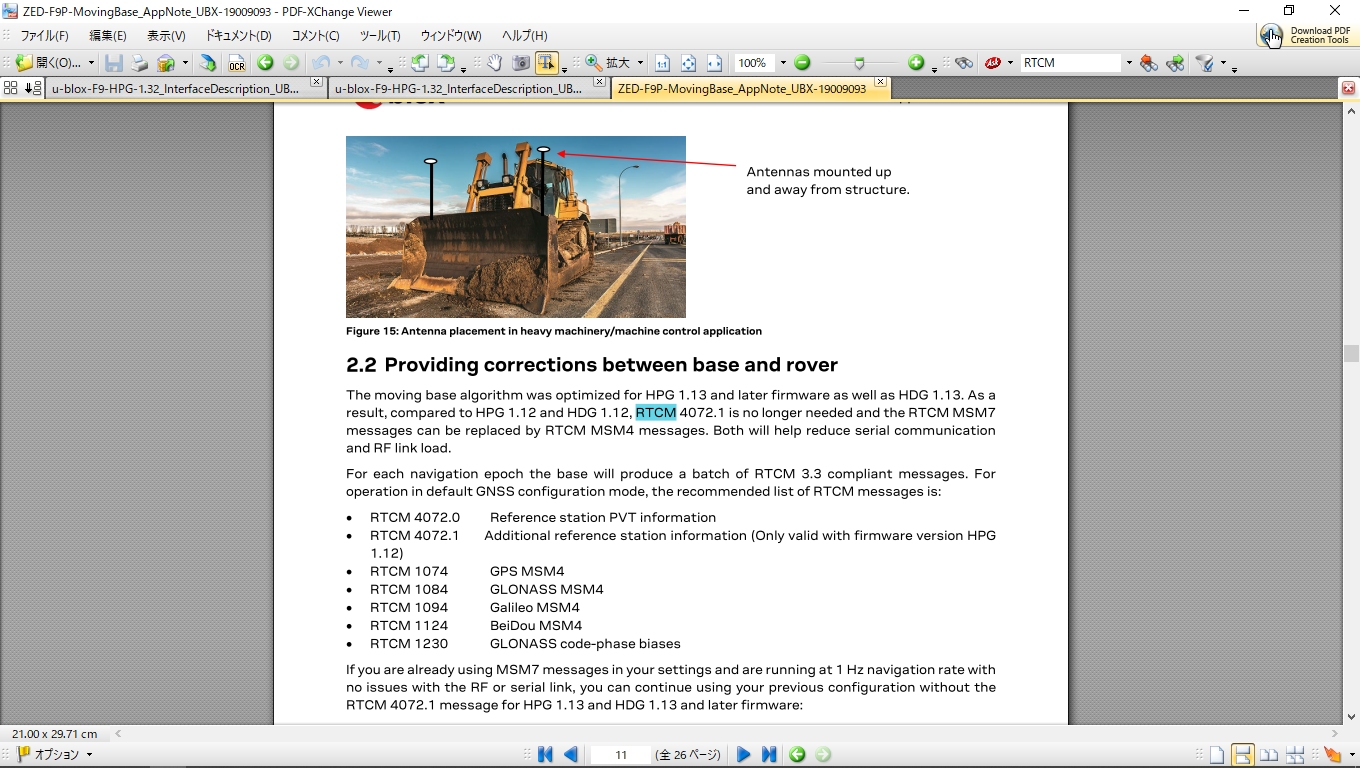
7個のメッセージを登録しなければいけません
• RTCM 4072.0 Reference station PVT information
• RTCM 4072.1 Additional reference station information (Only valid with firmware version HPG
1.12)
• RTCM 1074 GPS MSM4
• RTCM 1084 GLONASS MSM4
• RTCM 1094 Galileo MSM4
• RTCM 1124 BeiDou MSM4
• RTCM 1230 GLONASS code-phase biases
準備2:通信メッセージ登録手作業
過去記事が大事です。 【L-RTK】F9Pをu-centerで設定<send動作ではまる>
UCENTERは非常使い勝手が悪いツールで変更1か所ごとびフラッシュに書き込む作業が必要です、
1:設定変更したら、
2;左下SENDボタンを押して、
3:現在の画面閉じるときコーションがでてOKをすると
4:フラッシュ書き込み画面がでるので
5:ここでSENDボタンを押して
6:更に、ダメ押しでReciver>Action>save config をクリックします。
これを1個の設定毎に行いますので7か所なら42回も手を動かします。手が疲れるし間違い易いです。
=>ミスが出易いので設定終わったら、電源オフして再起動して設定がフラッシュに保存されているか
チェックしないとあと、次のステップでハマります。
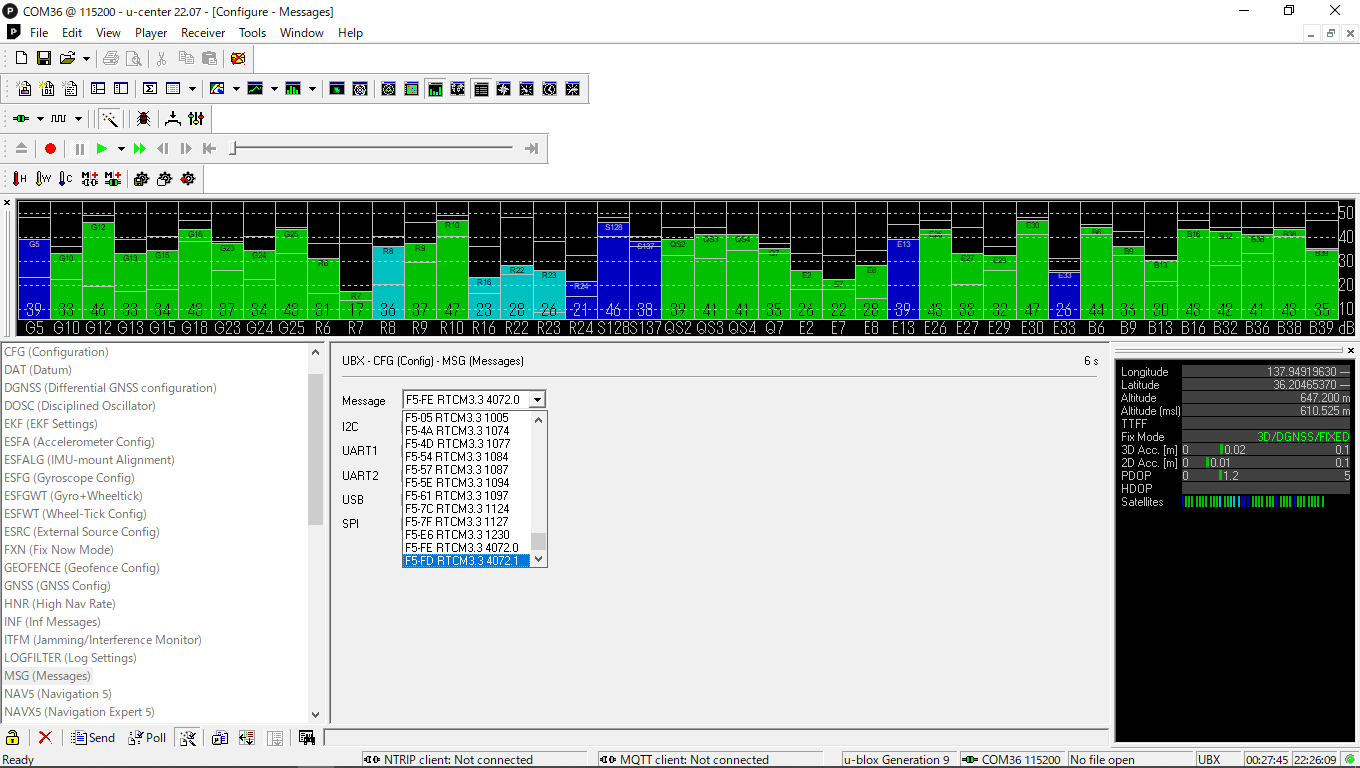
この操作のスクショです。
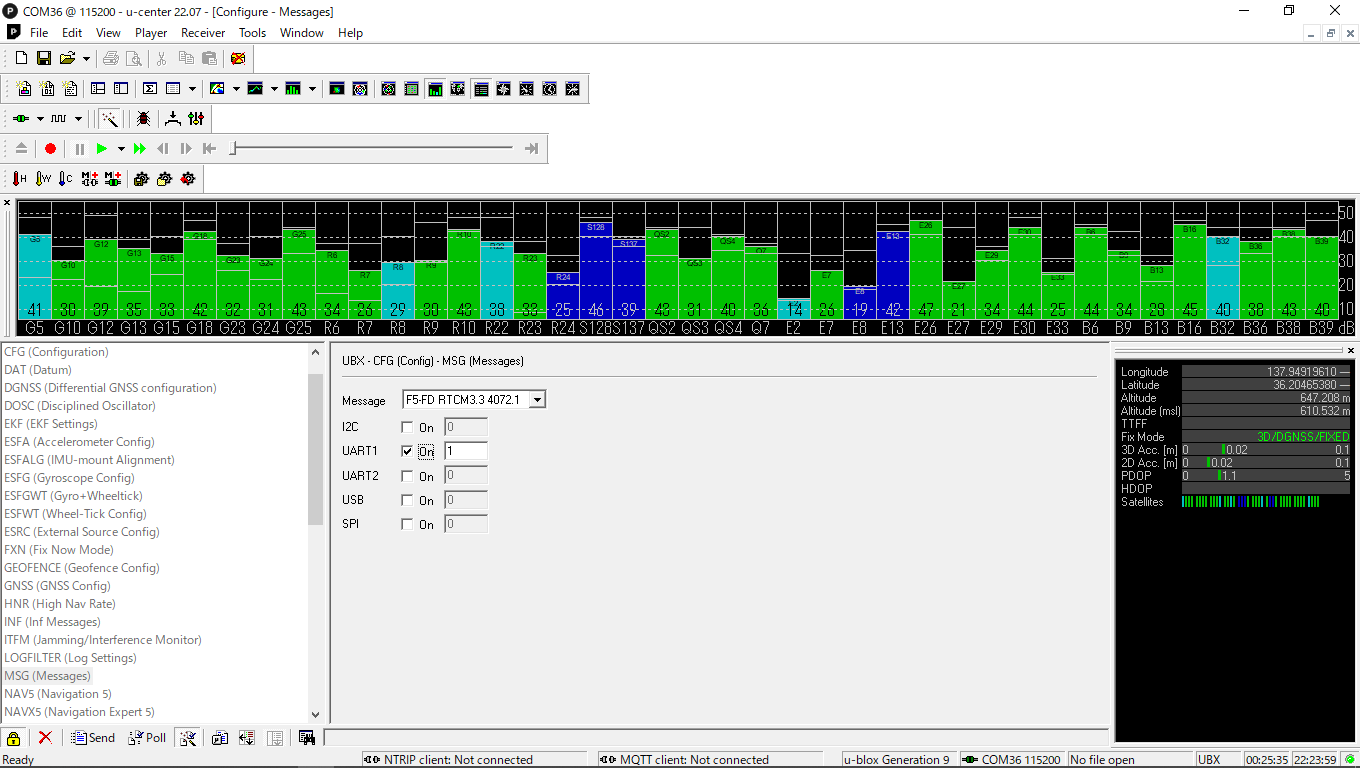
NAV>CFG>MSGでメッセージコンボから送るメッセージを選びます。ここでは、RTCM3 40721を選んで、
UART1にチャックをいれることで、UART1のTXピンからRTCM3 40721が送信されます。
これを下記7個分こつこつと一個ずつフラッシュに登録していきます。
• RTCM 4072.0 Reference station PVT information
• RTCM 4072.1 Additional reference station information (Only valid with firmware version HPG
1.12)
• RTCM 1074 GPS MSM4
• RTCM 1084 GLONASS MSM4
• RTCM 1094 Galileo MSM4
• RTCM 1124 BeiDou MSM4
• RTCM 1230 GLONASS code-phase biases
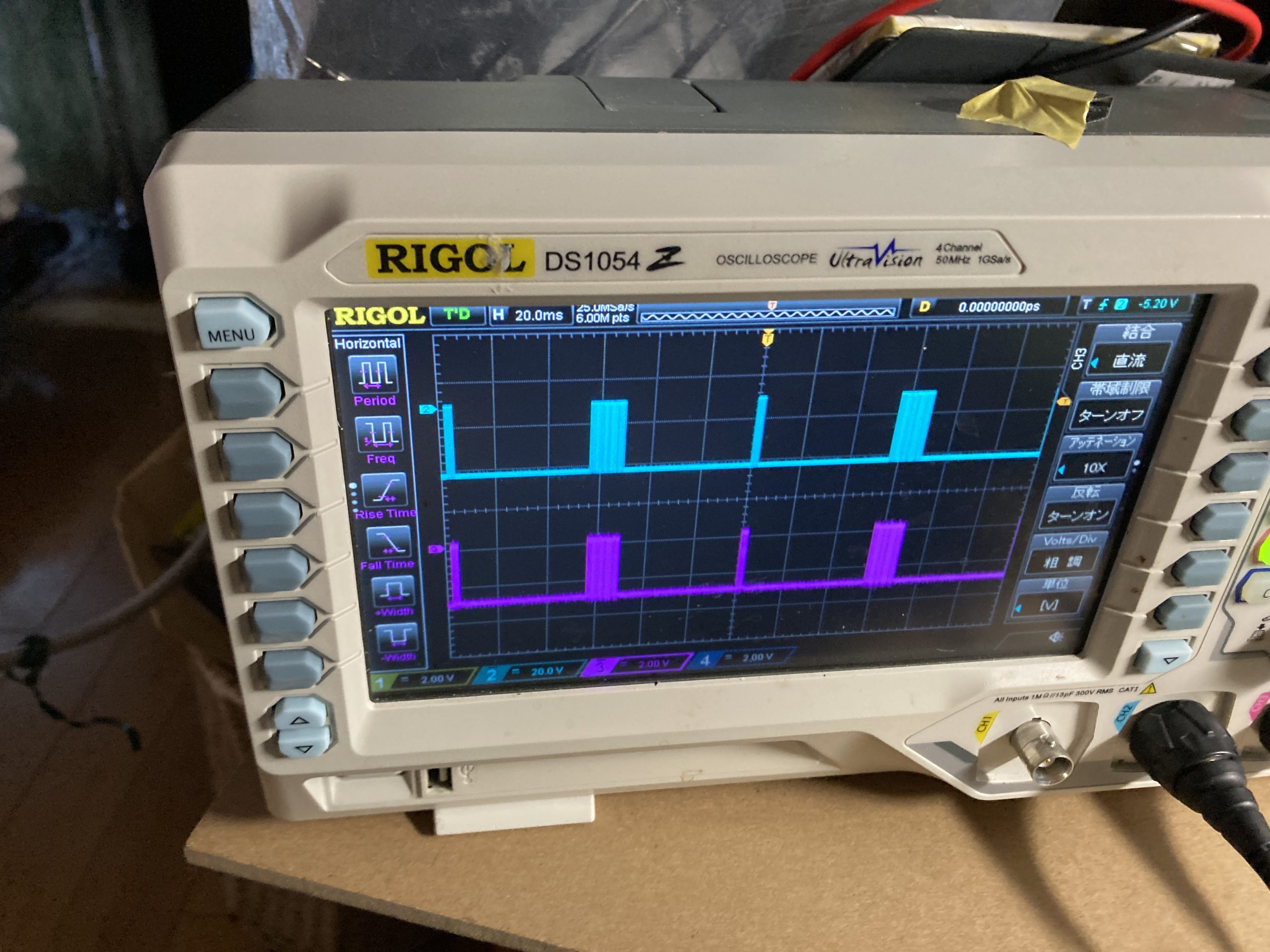
準備3:信号の確認
オシロで、UART1のTXからRTCM3信号がでているかみます。RTK開発では、オシロは必須です。
5-6万円の4CHオシロが便利です。RTKを始めるには、最低10万円の投資は必要です。
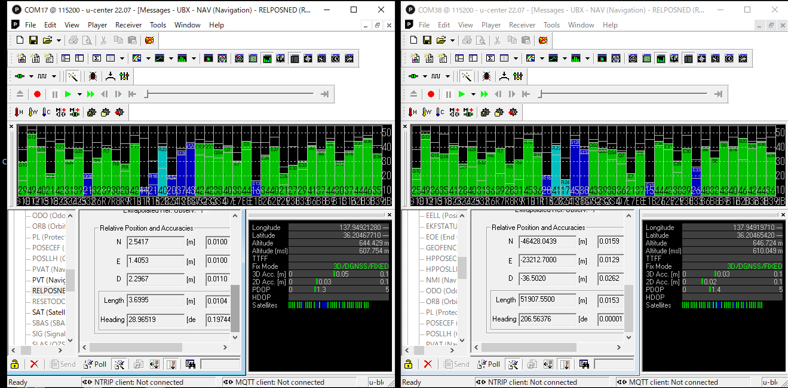
●動作確認
Baseが完成したら、Roverと接続して、ucenterを2個立ち上げて、BaseとRoverのRELPOSNEDをみます。