ピーク補正では、最初と最後の突出した誤差がとれないので、別の補正アルゴリズムを模索してます。
スキーターンのあるべき姿から大きくかけはなれたデータがでているので、へたくそ滑りのデータほど
理屈に載らないので、データ処理の手間が膨大にかかります。
●理屈に載らない点1:ニュートラルポイントで、headMotとHeading,yawが一致しない。
=>タイミングも角度も一致しない場合が多発してます。これは、切り替え時点で、スキー板が横滑りしていると
思われます。まともに板に載ってないので、無制御的な滑りをしているのだと思います。
●理屈に載らない点2:ターンの角度振幅がjheadMotとHeading,yawと一致しない
=>キチンと板をそろえて滑ってないので、ターンの終了時点で谷足がぶらぶらで慣性の方向へ振れていて
振幅が大きくなってしまっている。
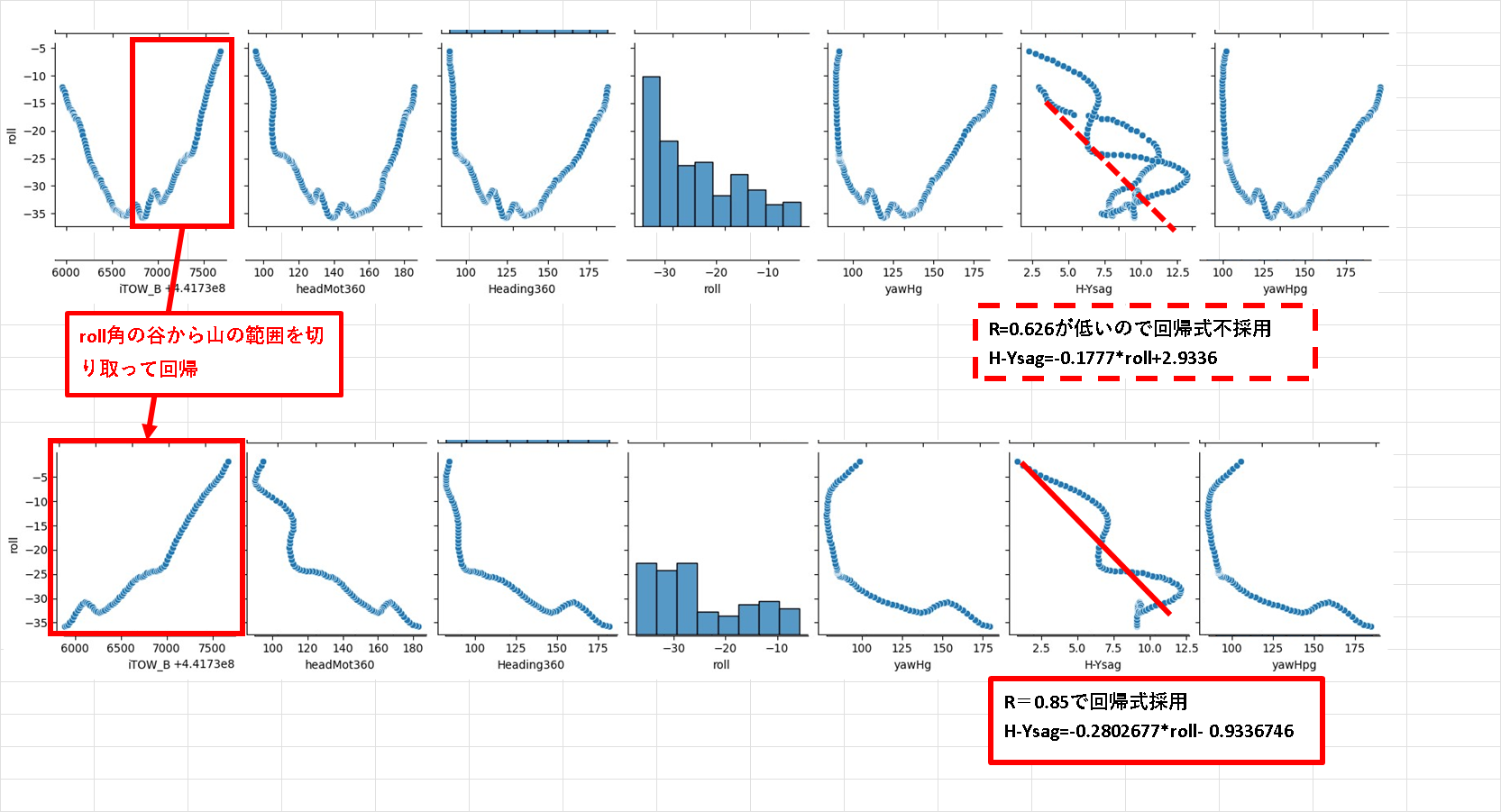
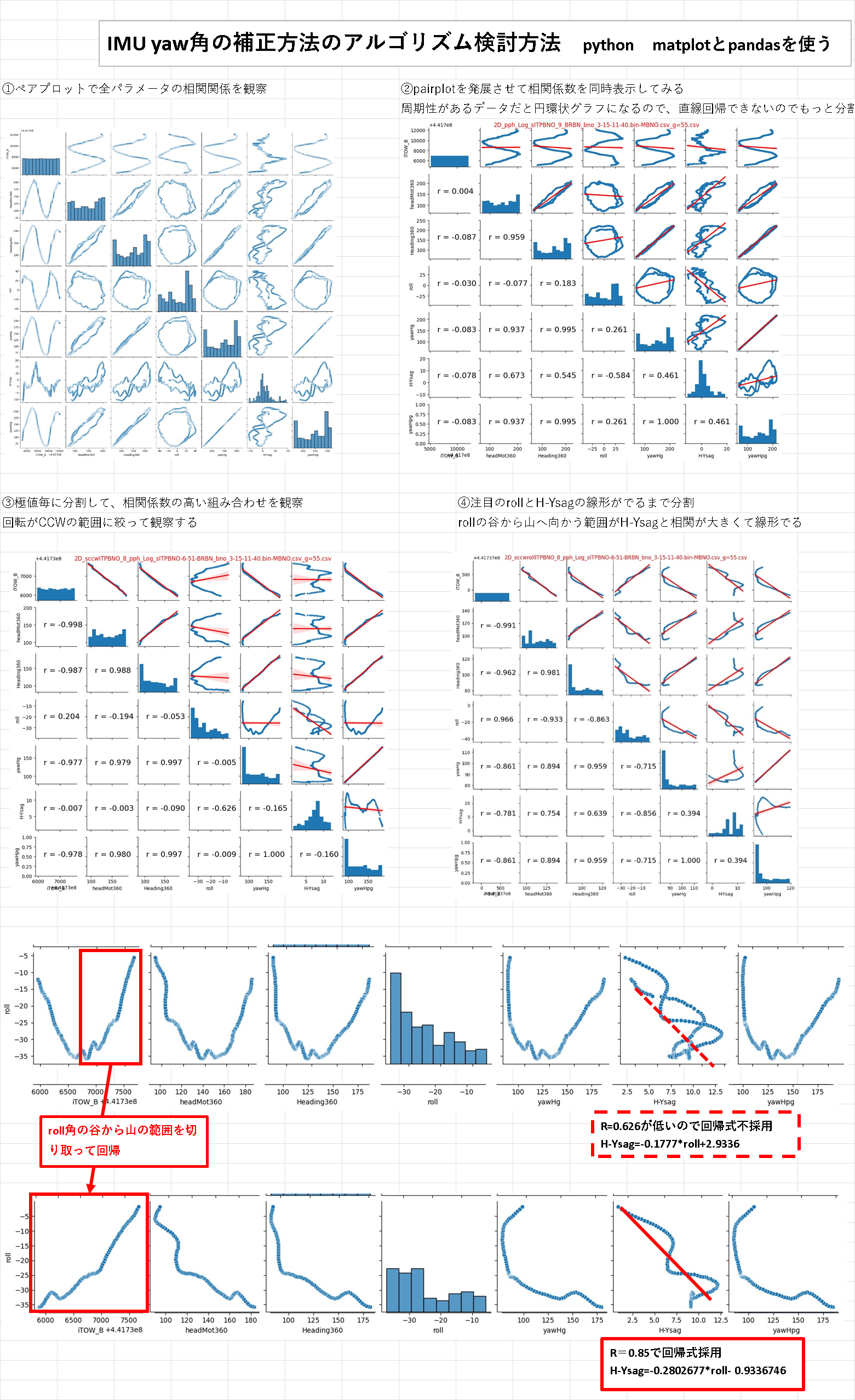
●上記の理由からピーク補正ではや誤差の大きい逸脱を修正できないので、ペアプロットを眺めなおして
以前から気になっていたroll角とyaw誤差の関係を深堀しました。
ペアプロットのプログラムは、pp rc キー押しで起動します。
https://gist.github.com/dj1711572002/2560c44892dab63c6941631ca4248183
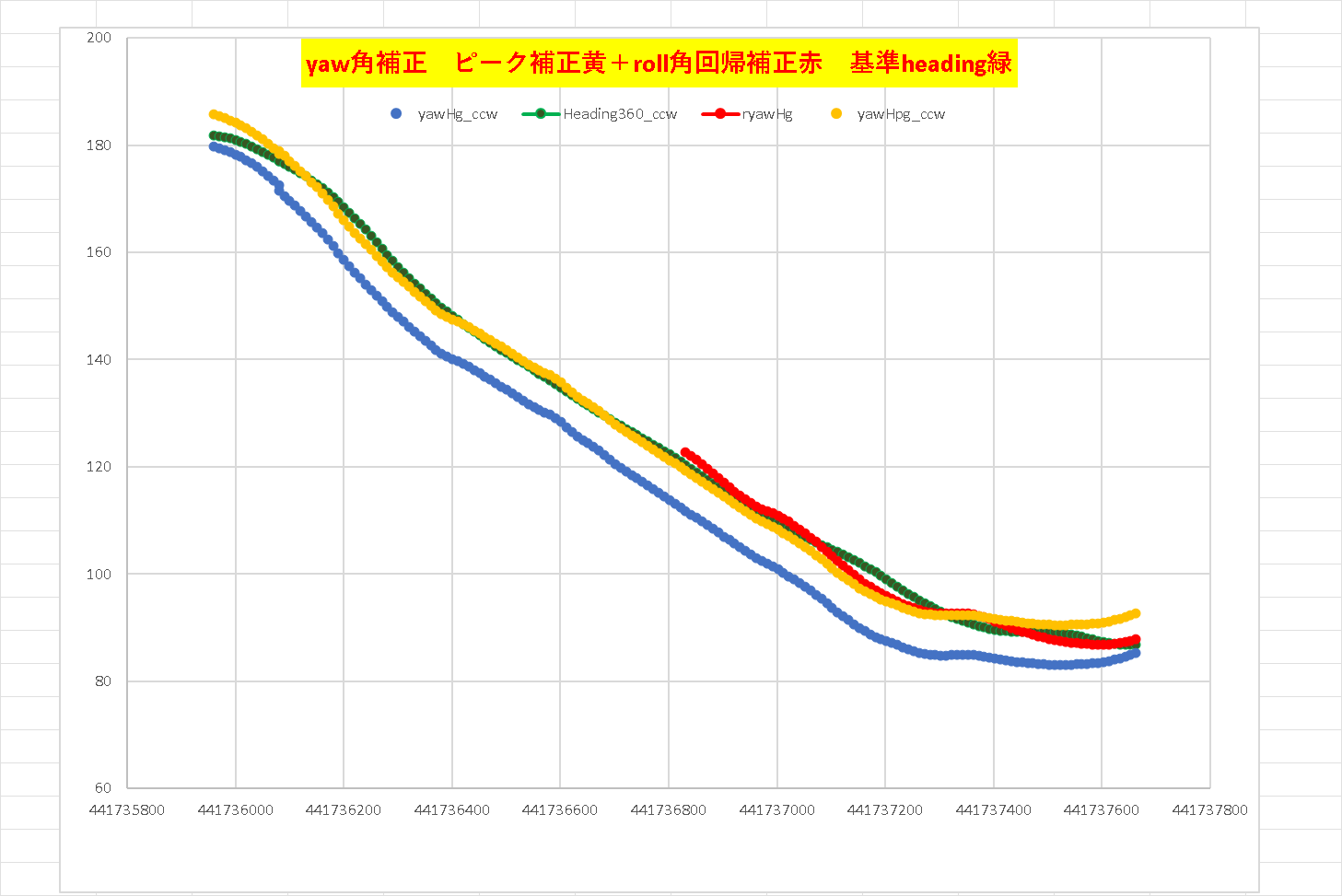
●結果
緑色がHeading角で正しい方角の基準データです。青線がIMUのyaw角測定データを初期のオフセット下駄をはかせただけのデータです。これにheadMotに対するピーク補正をいれると黄色線になります。黄色線の最初と最後で跳ね上がって
大きく誤差がふくらんでいる点が欠点で、誤差ばらつきを増大させていたのですが、赤線のroll角回帰補正をいれると
最後の跳ね上がりが抑えられていることが判りました。
●以後
まだ、最初の跳ね上がり現象の対策は見えてませんが、手法として、問題の範囲を細かく分解して、線形となるパラメータを抽出して回帰で修正する手法で、補正作業をやってみます。
これは、チャンピオンであって、未だ、roll回帰補正がOKである確証がありません。
機械学習の特徴量のひとつとして、分類か回帰処理にトライしてみるかしないとダメかもしれません。