Python seaborn ペアプロットをいろいろいじりながら眺めていたら、重要な規則性を発見しました。
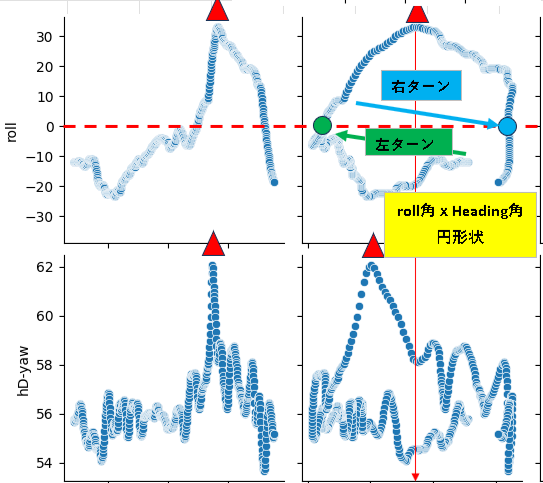
●発見したこと1:ロール角とHeading角とheadMot角とかyaw角の相関プロットは、円形状になる
=>どんな初歩的なターンでも、ターン開始は、ロール角中立点から始まり中立点で終わる、ターン中にロール角のピークを迎える。
スキーターンでは、。左右交互にターンするので、角度が1周して、円形状のプロットとなる。
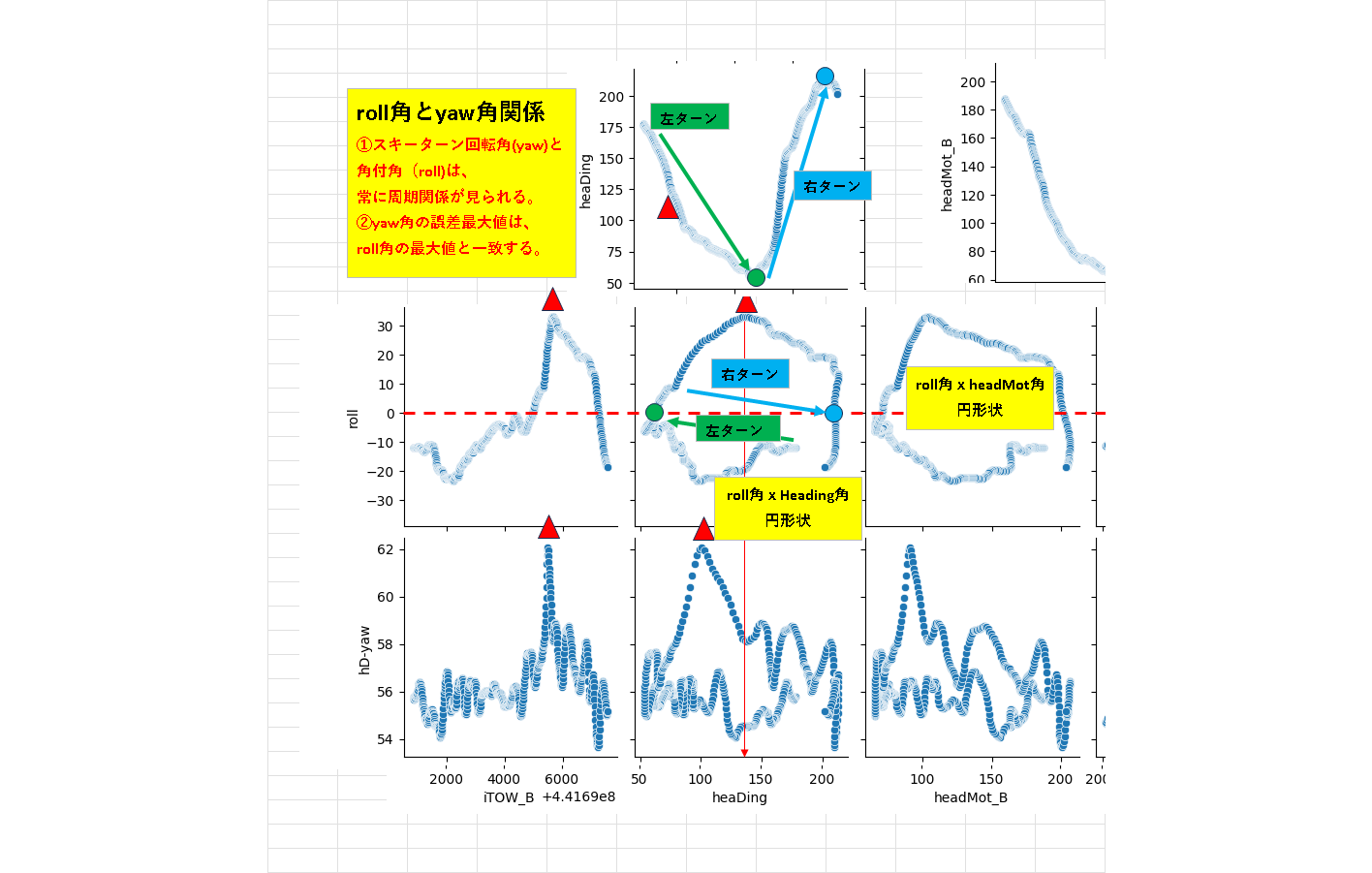
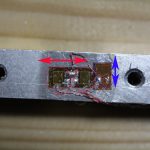
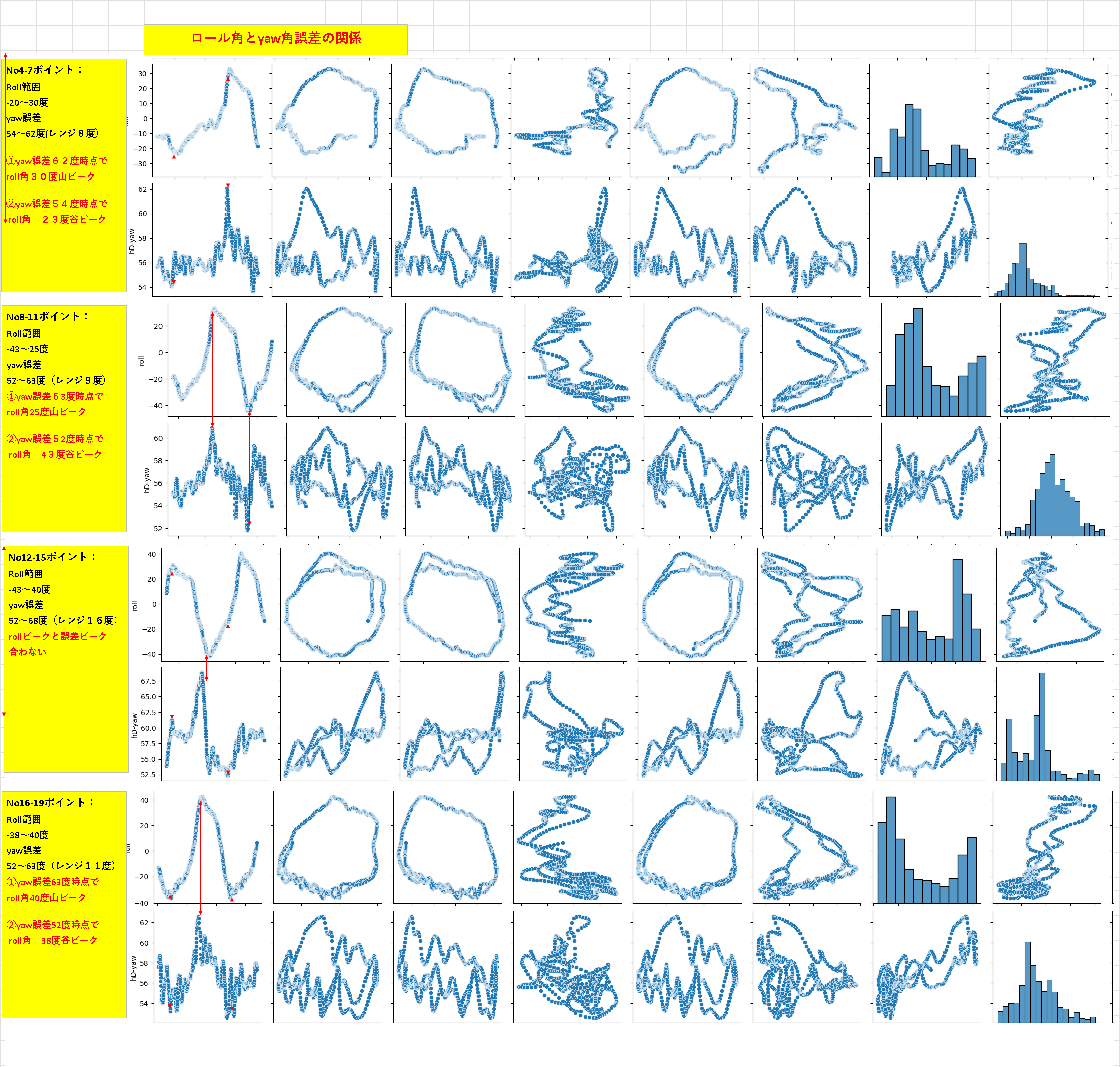
●発見したこと2:yaw角誤差の最大値、最小値は、ロール角のピーク位置とほぼ一致する。
※No12-15では、yaw誤差とロール角の一致がみられない。このターンは、他のターンと違いがあったらしいので後で解析する。
=>下表細い赤矢印で、yaw誤差のピーク位置とロール角のピーク位置が一致しているのが判る
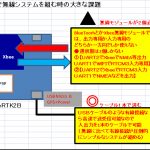
原因:BNO085のFUSIONのクロストークではないか?ロール傾斜した場合、YAW角を傾斜補正しないといけませんが、それがうまく追随できなくて
誤差となってしまう。だから、YAW角の最大、最小値で誤差の最大、最小値になってしまう。弱点がある。
磁気センサの傾斜補正は、傾斜角の変動がゆっくりなら精度よくできますが、速い振動的な傾斜運動だと精度が低下すると解釈します。
●スキーターンでのロール角は重要
今回のデータは。低速 時速10~20kmhのズレズレターンであったにもかかわらず。
ターン方向角とロール角の関係は、必ず円弧を描く点で、スキーターンにおける角付(ロール)角とターン回転角の
関係顕著にみられたのは、PYTHON ペアプロットのおかげです。
●以後
リール角とYAW角始点で、補正方法を検討していく。
機械学習でもこの関係が顕著にでてくるか検証してみる。