IMU BNO085をMovingBaseの代替と使うことがSSTA24の目玉なので、MovingBaseと比較しながら
補正方法を検討します。そのために、テストベンチとなるMovingBaseをしっかりと構築する必要があります。
今シーズン以降必要が無くなったら、STA25で移動基準局としてF9Pと防水ケースとして活用する案も考えてます。
既に防水ケースの寸法はきまっているので、この中に全MovingBaseデバイスを詰め込まないといけません。
幅64mmx高さ23mmx奥行100mmです。SMAアンテナ処理で15mmmほど食うので
基板は、80mm長で抑えないといけません。
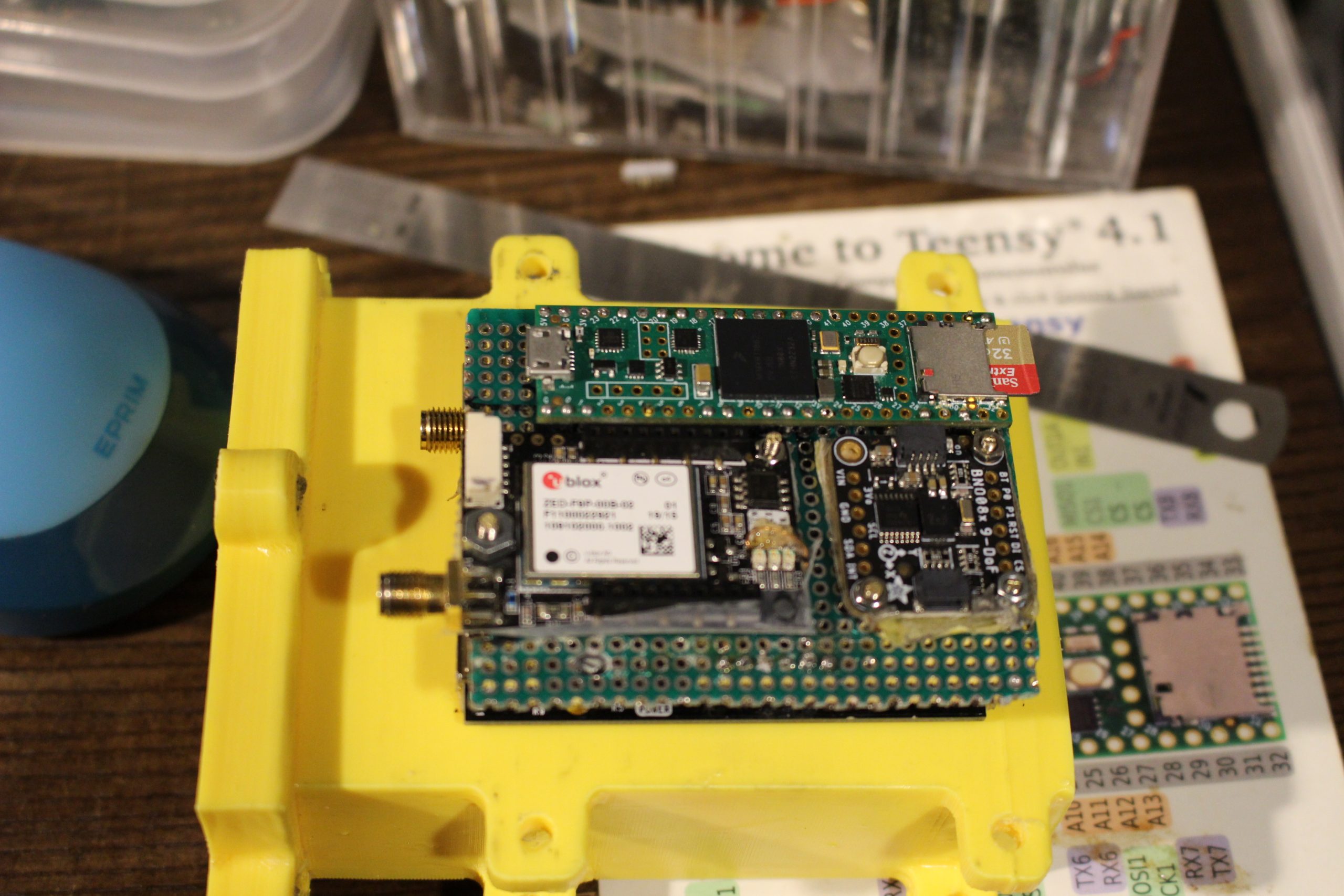
●1階2階の構成
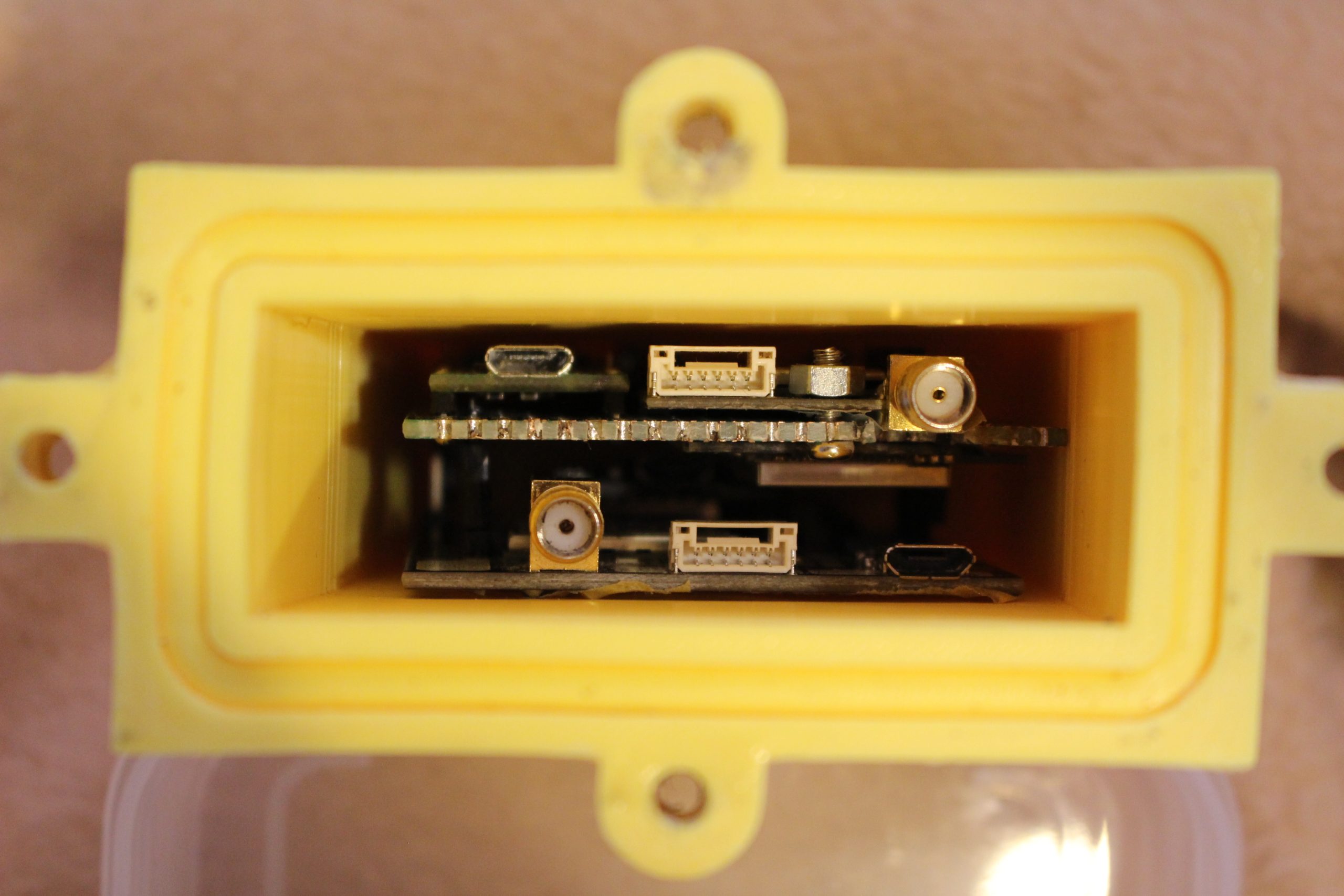
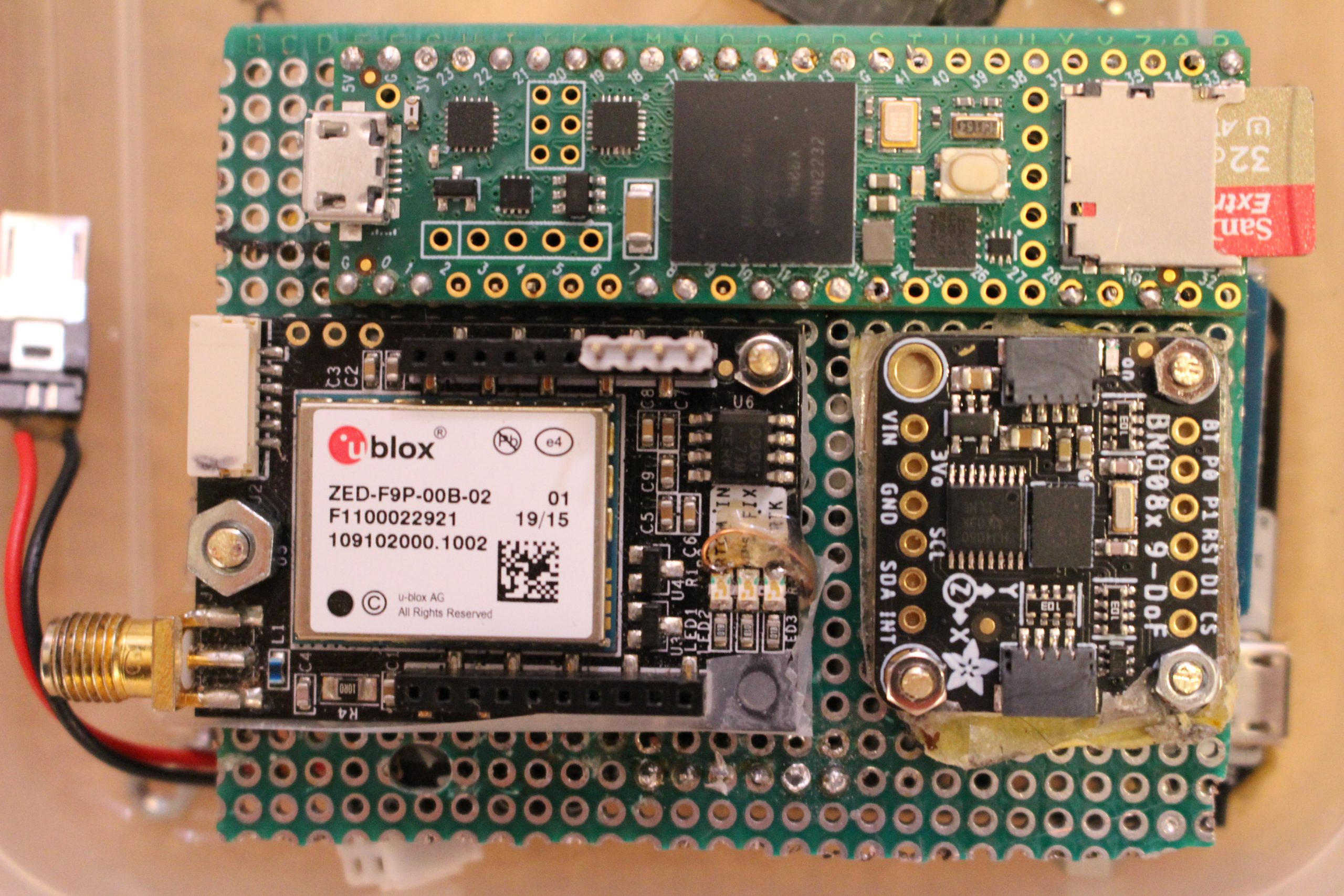
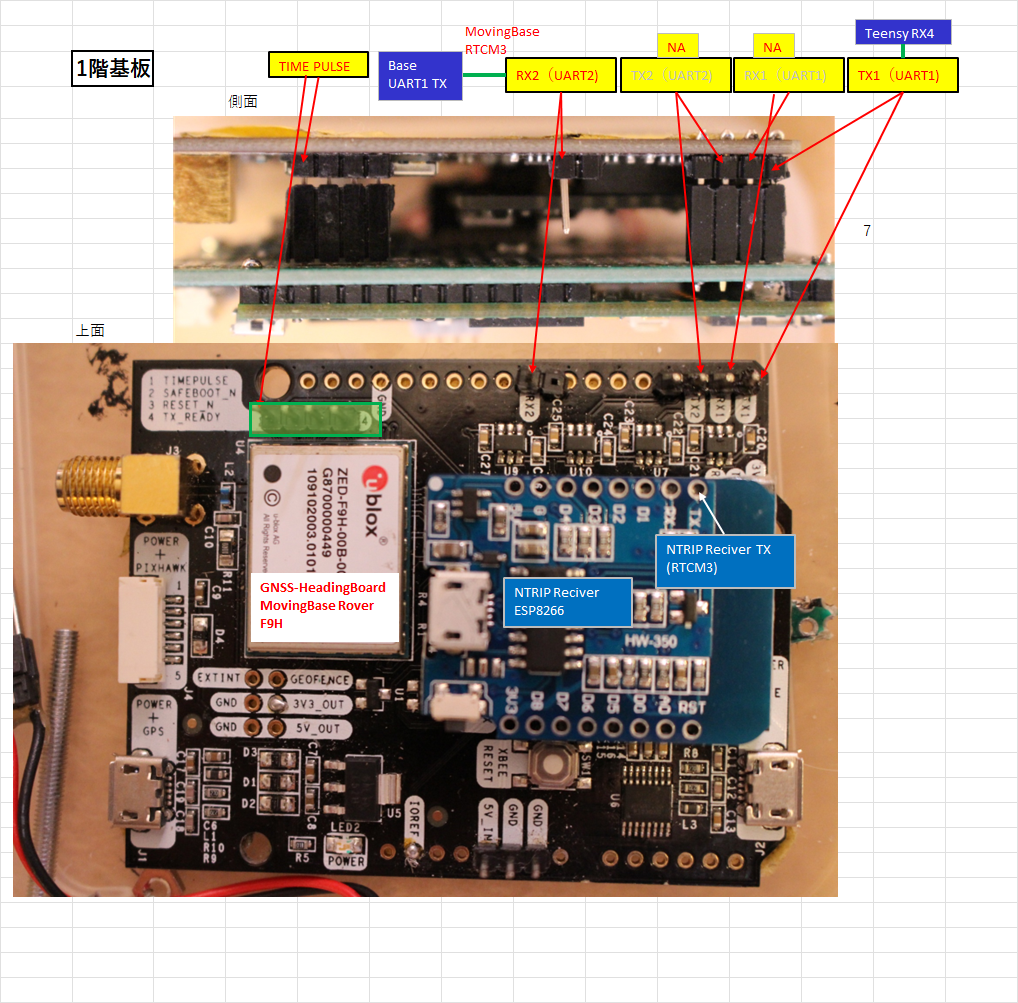
① 1階基板は、RoverのF9H基板とスーペースにNTRIPレシーバーのESP8266を載せてます。
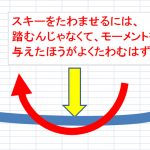
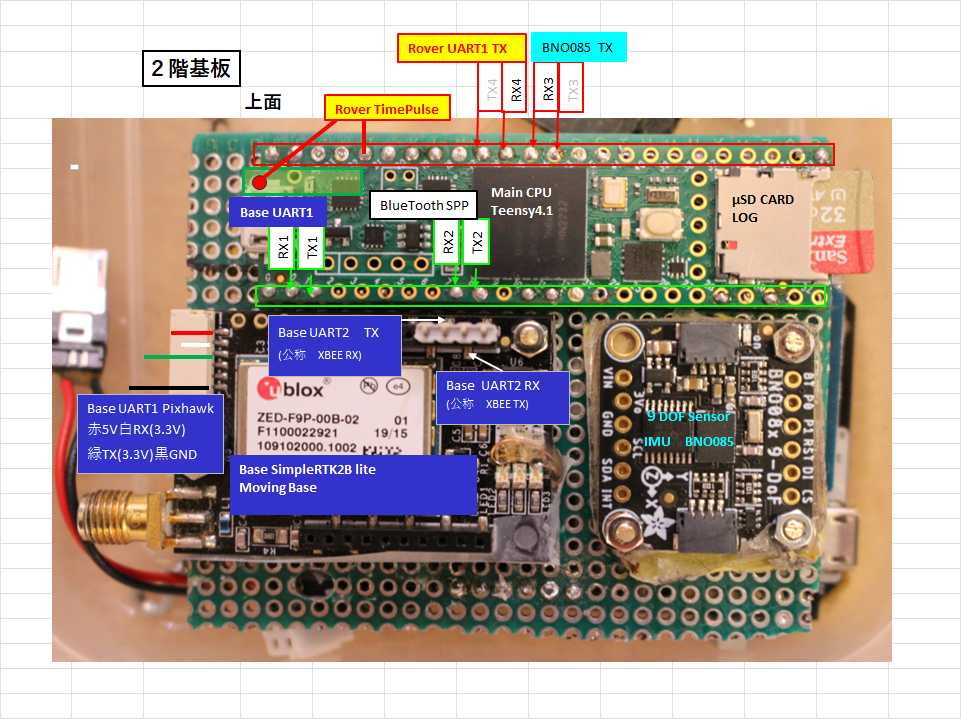
② 2階基板 上面は、BaseのSimpleRTK2BとMainCPUのTeensy4.1,IMU BNO085が搭載
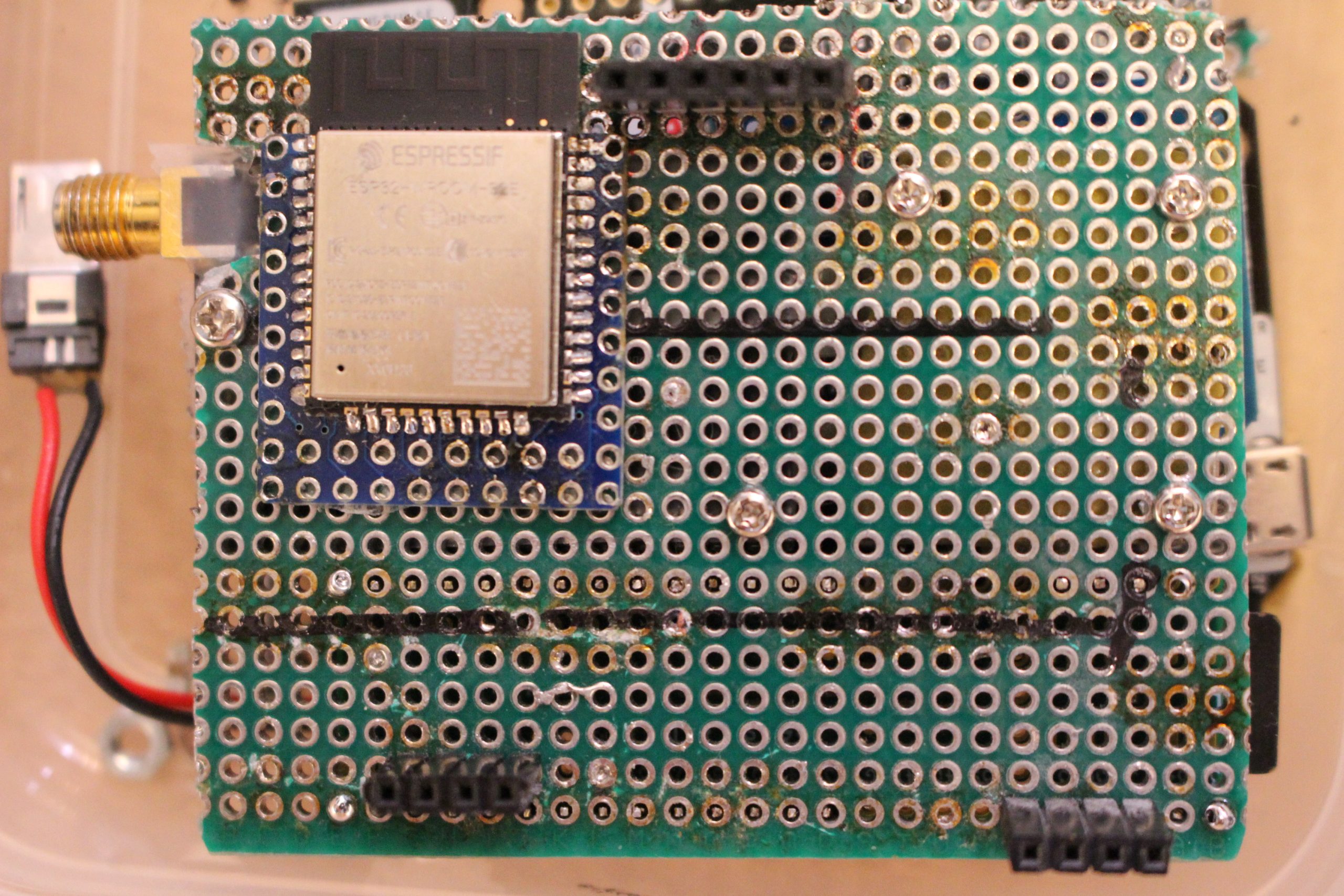
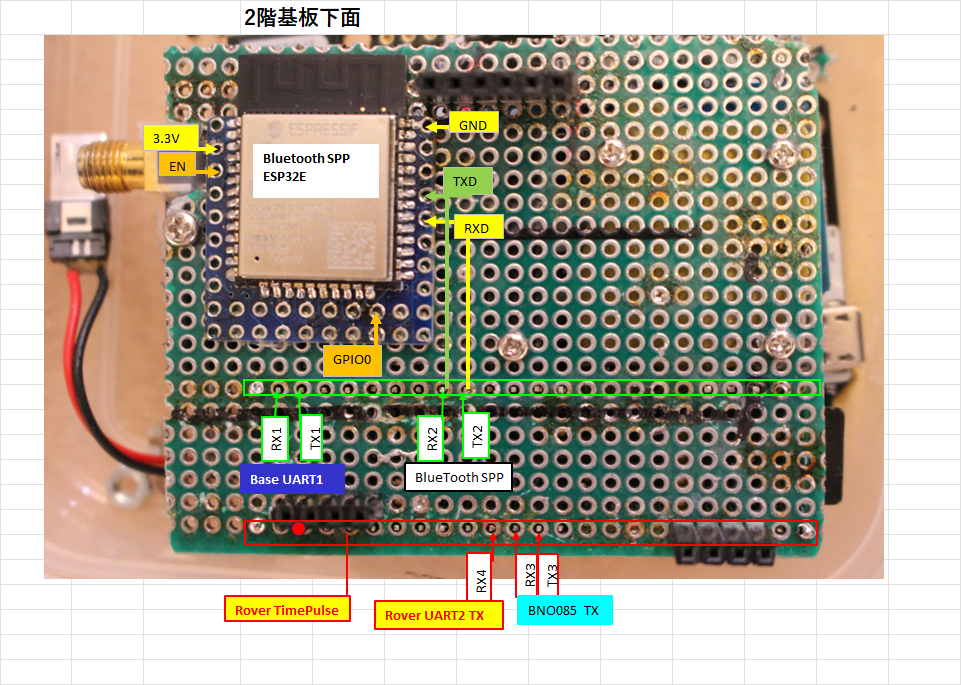
1階裏面の空きスペースにESP32EのBlueToothSPPを詰め込みました。
UDPにしない理由は、TeensyからSPIで高速のデータ転送をするとトラブル可能性があるからです。
SDカードログがあるので、全データはログできるし、欲しいのは、Heading角だけなので、
Bluetoothには、必要最小限のデータを流すだけですませる予定です。
●配線備忘録
普段なら、はんだ付けしながら適当に配線していくのですが、今回は、容量がきまっていて、
配線を忘れていたら、全体のレイアウトを変更しないと入らないという事態が想定されるので
事前に配線レイアウトをチェックしてから、半田付けにはいることにしました。1ミリでも予定外の
配線するとケースに入らなくなるので、神経をつかいます。来週う前半までかかりそうです。
●2階表の配線
1階の基板からでてくるピンソケットがTeensyに隠れてしまうので、Teensyを半田付けする前
に1階のピンソケットがささる線を半田付けしておかないといけません。
Teensyに4個のシリアル入力がありますので、普通のマイコンでは、MovingBaseの高精度システムを
組むことが困難なことがわかります。Teensy4.1がないと高精度MovingBaseはできませんでした。=>>
=>SimpleRTK2B liteのUART2がXbeeソケットからしか出てないので、ピンを刺すと高さが1ミリ高くなって
ケースに入らなくなるので、苦肉の策としてXbeeソケットの足の固定部のバンプに半田付けします。
●2階裏の配線
Teensyには裏面から配線するので、間違えないようにきちんと書いておきます。
●1階の表
Roverは、以外とシンプルです。片方向通信しか行わないので。
1:MovingBase用のRTCM3を460800bpsでUART2 RXで受信する入力と
2:MovingBaseの結果PVTとRELPOSNEDをTeensyのRX4に出力する
3:TimePulseをTeensyの22番ピンに出力します。SimpleRTK2B liteにはTimePulseピンがないです。
●以後
配線図をかくだけで、1日かかってしまいました。あと3日くらいかけて配線と机上動作試験を繰り返します。
MovingBaseをALLINONEで組み込むことの困難さがよくわかります。
こんなことしてまで、Heading角精度±1度を実現しないといけないのですから、
いかに方角を計測するのが大変かわかります。安いIMUなら精度が±5度しかでませんので、
MovingBaseで10万円以下で±1度を得られるのは価値があるかもしれませんが。
私のようにスキー用に使うには、かさばるのと取り回しが大変すぎてMovingBaseは重荷なので
IMUで補正する方法をトライすることにしました。