BNO055で、10か月こけていたのですが、土壇場になって、BNO085で一挙に10か月の課題が
クリアとなり、MovingBase廃止してIMUでスキー板のHeading角を計測できるシステムになります。
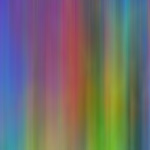
防水ケースと組み合わせた場合の新しいレイアウトを検討開始しました。

●STA24のレイアウト特徴
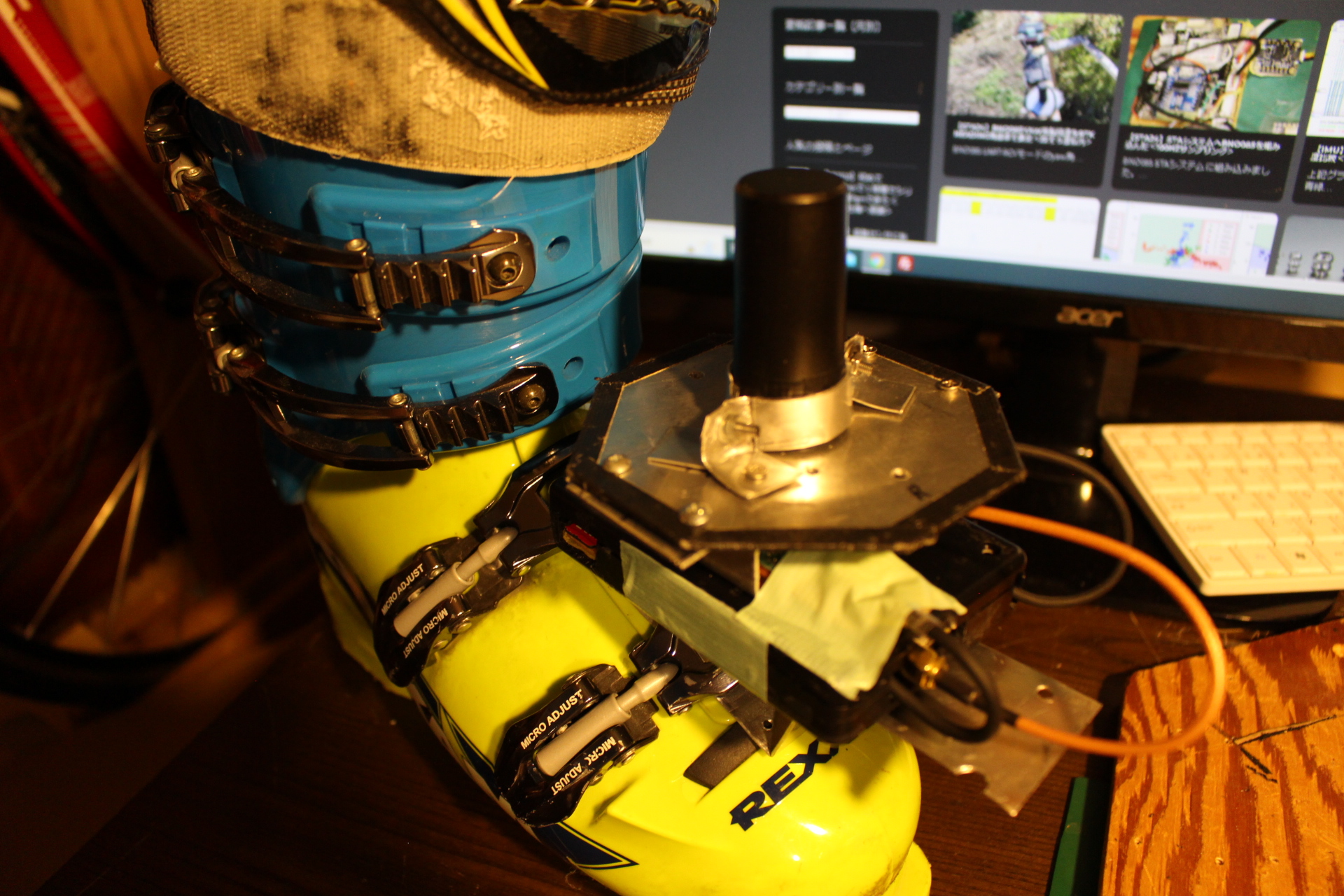
⓪ヘリカルアンテナの取り付けをバンド金具クランプ式にしました。
今までは、SMAネジでグランドプレートとアンテナをねじで挟み込んで
固定していたのですが、それだと、SMAネジがストレートの長いものが必要で
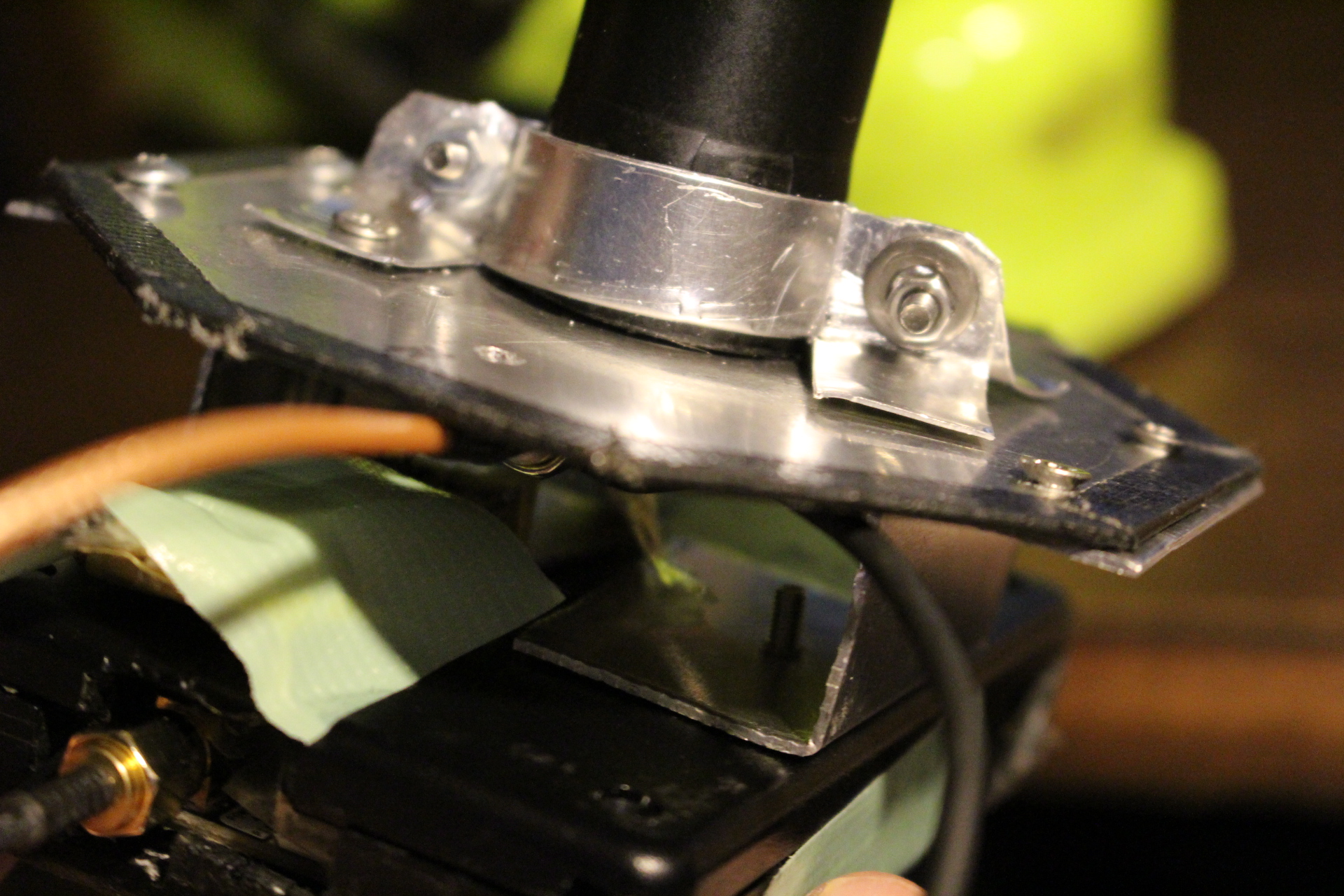
グランドプレーンの下に3cm程度スペースが必要でした。今回は、SMAをL字にして、下部スペースを15ミリと
半減させました。そのため、グランドプレーンとアンテナの固定をSMAネジが使えないので、クランプ金具を作りました。

①MovingBaseを廃止してIMUのyaw角でHeading角を計測
=>全体のサイズが半分以下になって、大幅は小型、シンプル コストダウンになります。
②アンテナとRTKボックスを一体化して、コンパクトでハンドリングが良いシステム
=>一体化することで、取り付け取り外しの手間が大幅に改善されます。
③アンテナとRTKボックスの間のスペースに、IMUと無線モジュールをいれこむことで省スペース
=>RTKボックスを3Dプリンタ防水仕様で製作するため、IMUと無線モジュールもRTK基板上空に
配置できるので、コンパクトなシステムになります。
ブーツへの固定は、バックルに挟み込む方式なので取り外しが簡単です。
角度はブーツによって、変わるので、板は、1ミリの厚み板で曲げやすいようにしてあります。

④電池が課題
=>電池をRTKボックスに入れ込んでしまうと、電池交換が大変になるので、なります。
防水電池ケースを製作するか、防水でなく脛に巻き付けて取り付けることで、防水無しにするか
いろいろ方法が考えられるので、電池は、システムが出来てから次に考えることにします。
●STA24システム機能の課題
課題1:IMUのBNO085が100Hzで姿勢角と加速度を出力するので、無線でモニターは無理なので
SDログした後、SDから無線でまとめて送信させる方法が必要。
=>今までBlueToothでまとめて送信していたのですが、115200bpsでは、遅すぎて、10分のデータを5分かけてBlueToth送信するという不便が発生した。
=>高速化するためには、大改造が必要で、ESP32Eをシリアル115200bpsでTeensy4.1に接続しているのをSPI接続にして、ESP32からはUDPかESP-NOWでタブレットかPCへ送信する方法なら
数MBPSで送信できるので、瞬時にSDログデータを送信できます。
ただし、SPIノイズがうるさいので基板上にESP32Eを配置させないけないのが大変です。
課題2:IMUが速くなったので、RTKが8,3Hz駆動で遅いので、10Hz駆動にしたいのですが、
HGP1.32は、処理が重いので、10Hzにするには、 BeiDou無にしないといけません。
●F9P04B(F9PのFWをHPG1.32にしたチップ)data sheetだと、RTK7Hzにおちてます。
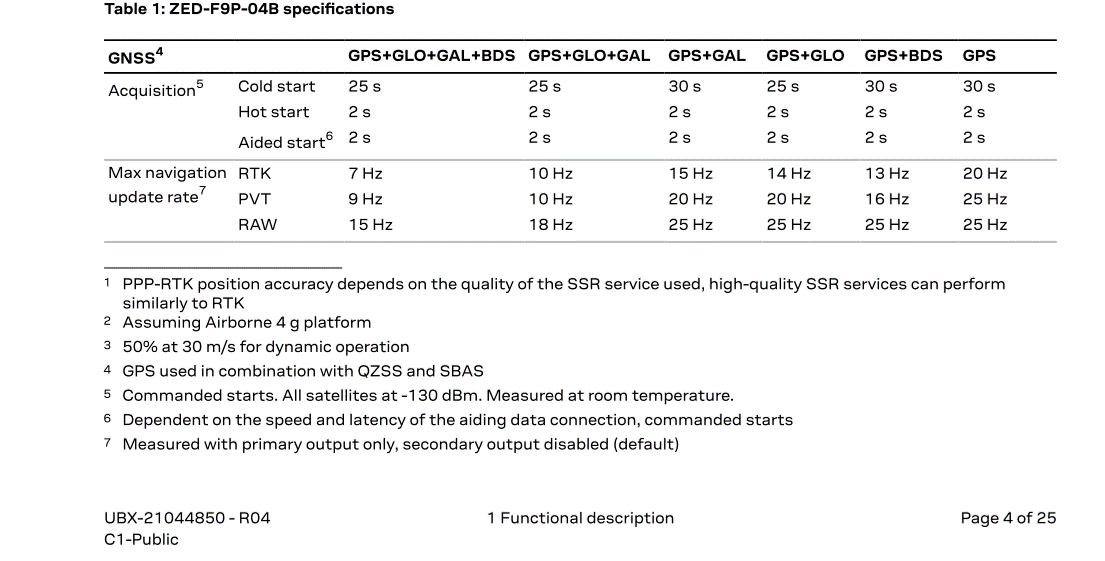
BeiDouは、仰角が低いため精度に大きく貢献している衛星なので、みちびきよりはるかに大事です。
それをやめても、RTK精度がでるか現地で確認しないといけません。
F9Pの衛星設定を変えて、RATEを速くする作業を現地でやりながら実験するのは大変手間がかかるので
現在の8.3Hzで当分は行こうと思いますが、課題として、
現在の8.3Hzもhgp1.32では、スペック外の使い方です。スペックでは、RTKは7Hzしかでないことになってますので、8,3Hzで使っていることで、F9Pが不安定なる場合があります。
それを確認するために、衛星数を減らして10Hzにするか、衛星数をフルにして7Hzにおとすか
いずれにせよ結構手間がかかる話しになってしまいます。
●以後
とりあえず、新レイアウトで機能確認だけしてから、3Dプリンタ防水ケースを設計はじめます。
いろいろ課題がありますが、防水ケースとレイアウトを最優先にして進めます。