BNO085 UART-RCVモードのyaw角精度は、机上での精度測定では、良好な結果でしたので
庭にでてRTK MovingBaseのHeading角基準で、動的な精度を計測しました。
RTK MovingBaseの解説はこちらです。
●やり方
①回転治具での回転精度
バーにアンテナとBaseとRoverをとりつけて、BaseのマイコンとBNO085を接続して
RTKと同期させてBNO085の100Hzのデータをログします。
ログデータは、BlueToothでノートPCで受信ログします。

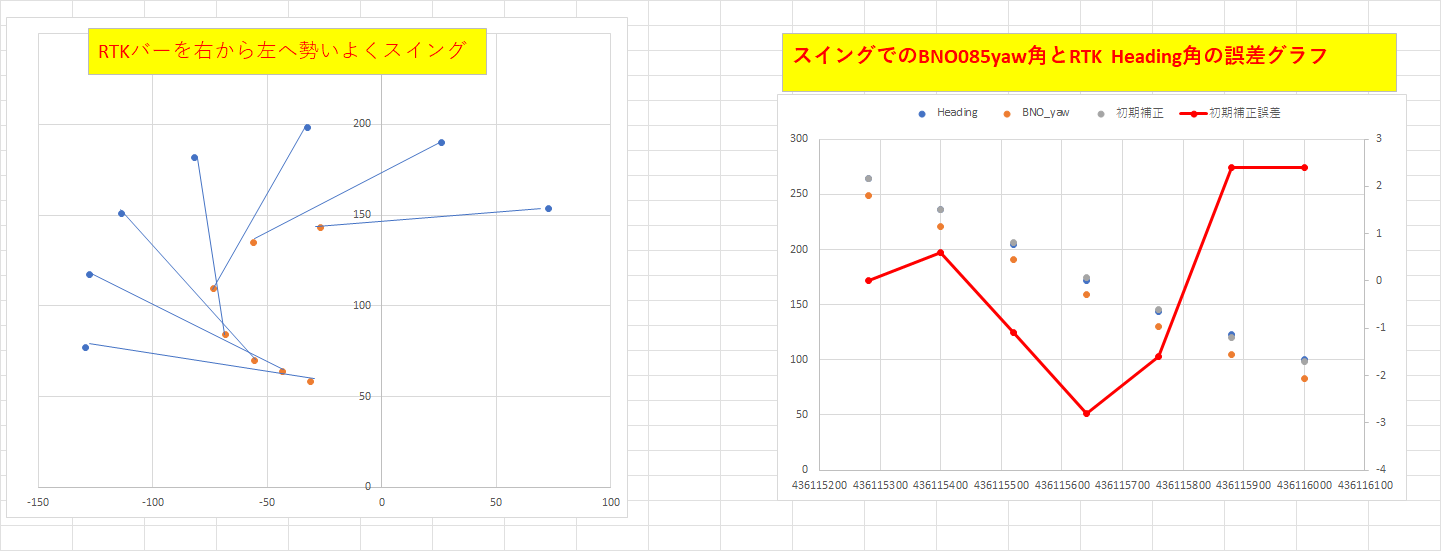
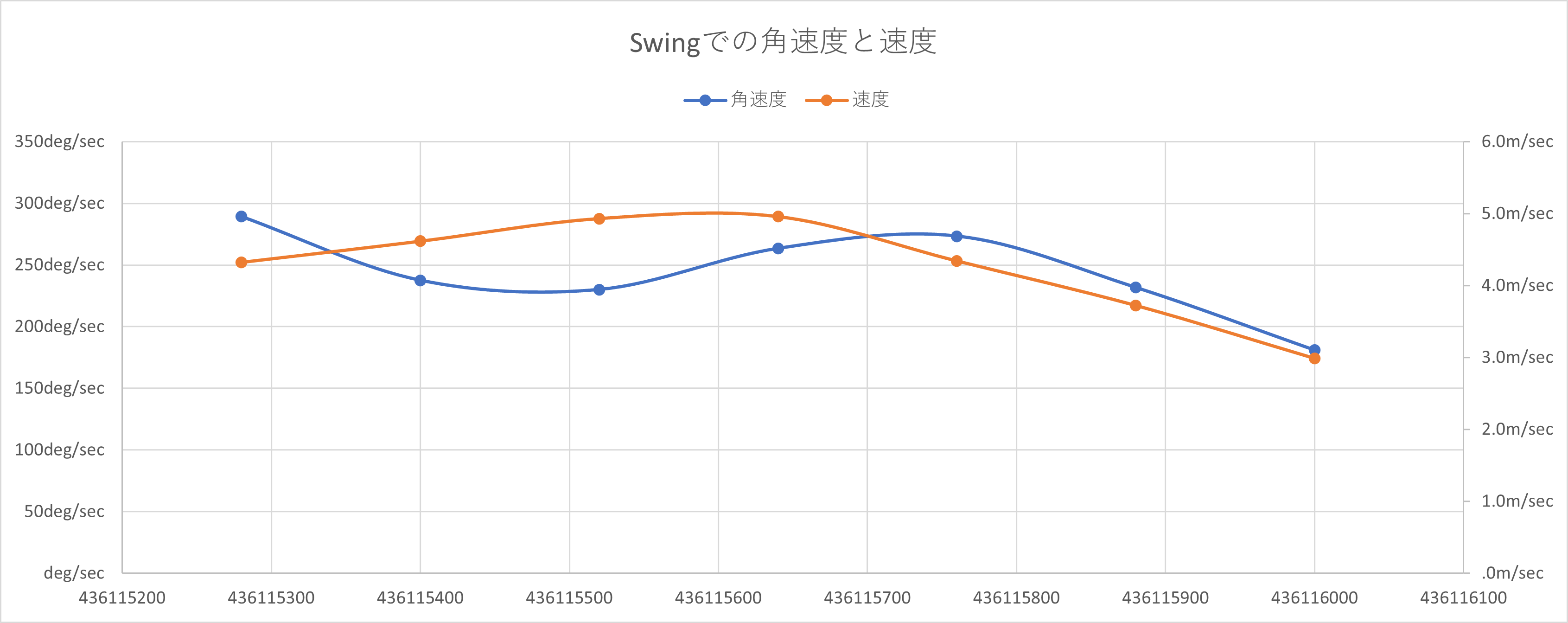
②Swing実験
バーを腕で振り回して、放物軌跡を与えてyaw角度精度を測定する実験です。
回転治具では、周速があまりでないので、腕で振り回すことで、周速をできるだけ上げました。

●結果
①回転実験データ
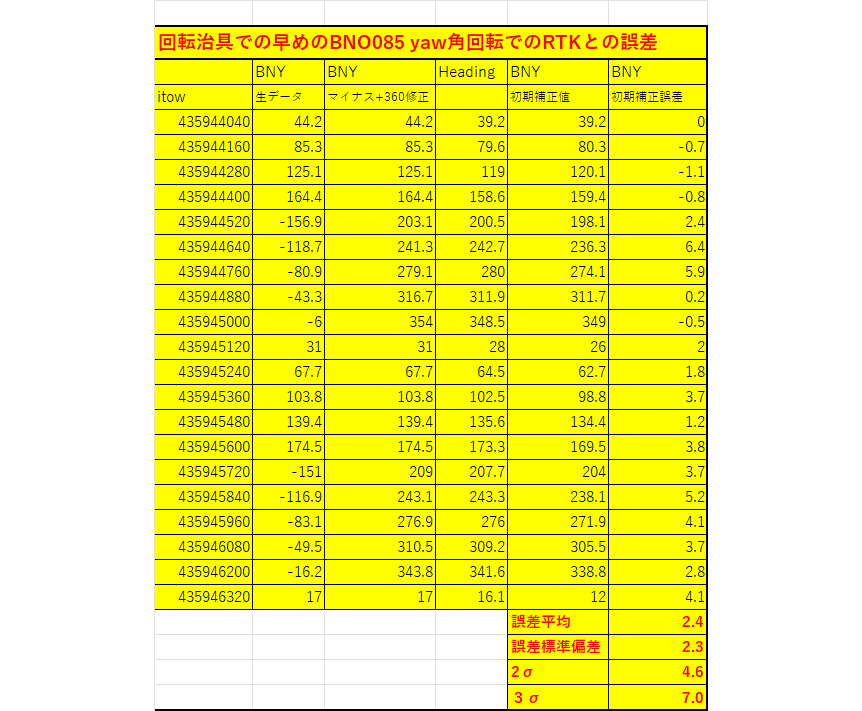
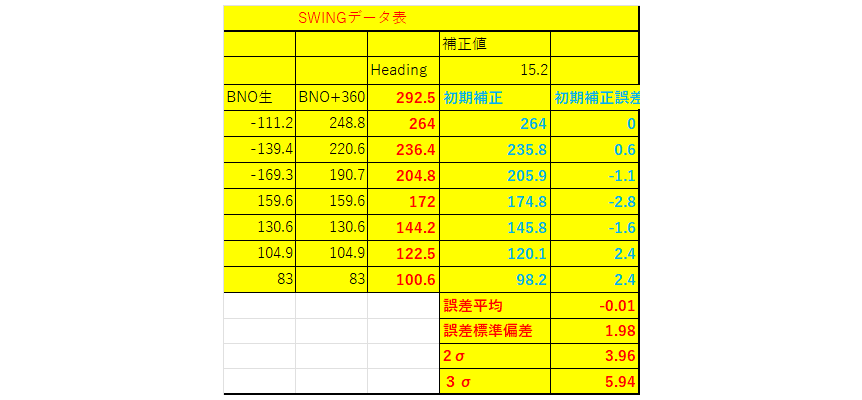
初期補正値とは、BNO085のUART-RVCモードでは電源オン時に向いている方角をゼロとなりますが、RTKは、電源オンからFixして、正確なHeading角を出力しますので、初回にBNO085のyaw角をRTKのHeading角に合わせる値のことを初期補正値と呼んでます。
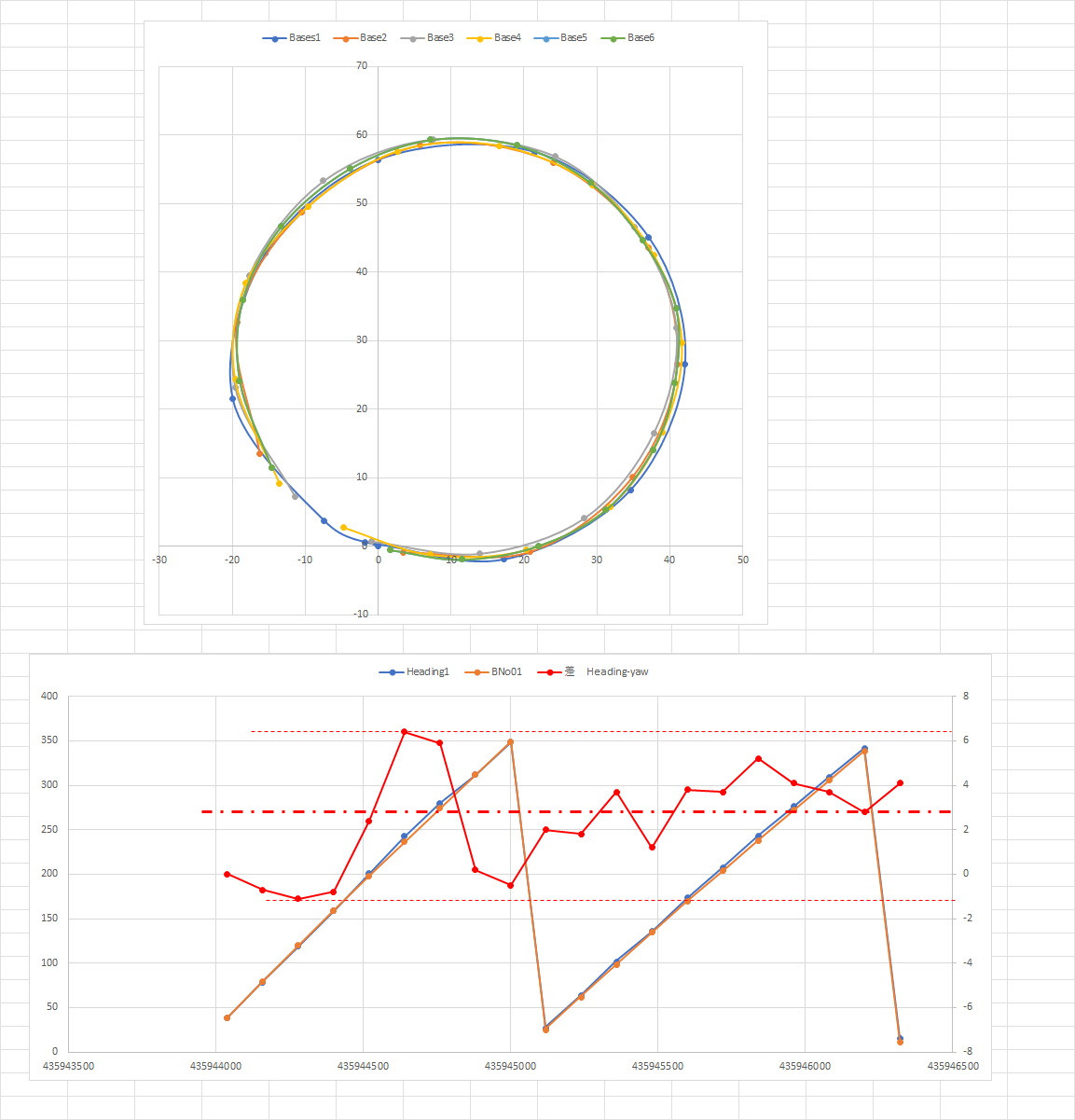
その初期補正値で、補正したBNO085yaw角データとRTK Heading角との差を誤差として計算した結果が下表です。
誤差平均値2.4度 標準偏差2.3度 2σ 4.6度 3σ 7度という結果です。BNO085の仕様内で収まってます。
2σの確率が95%ですので、9割以上のデータで5度以内はでるということです。
ばらつきの傾向として、周期的に5度以上のズレが発生して、通常は、2度以内でおさまってます。
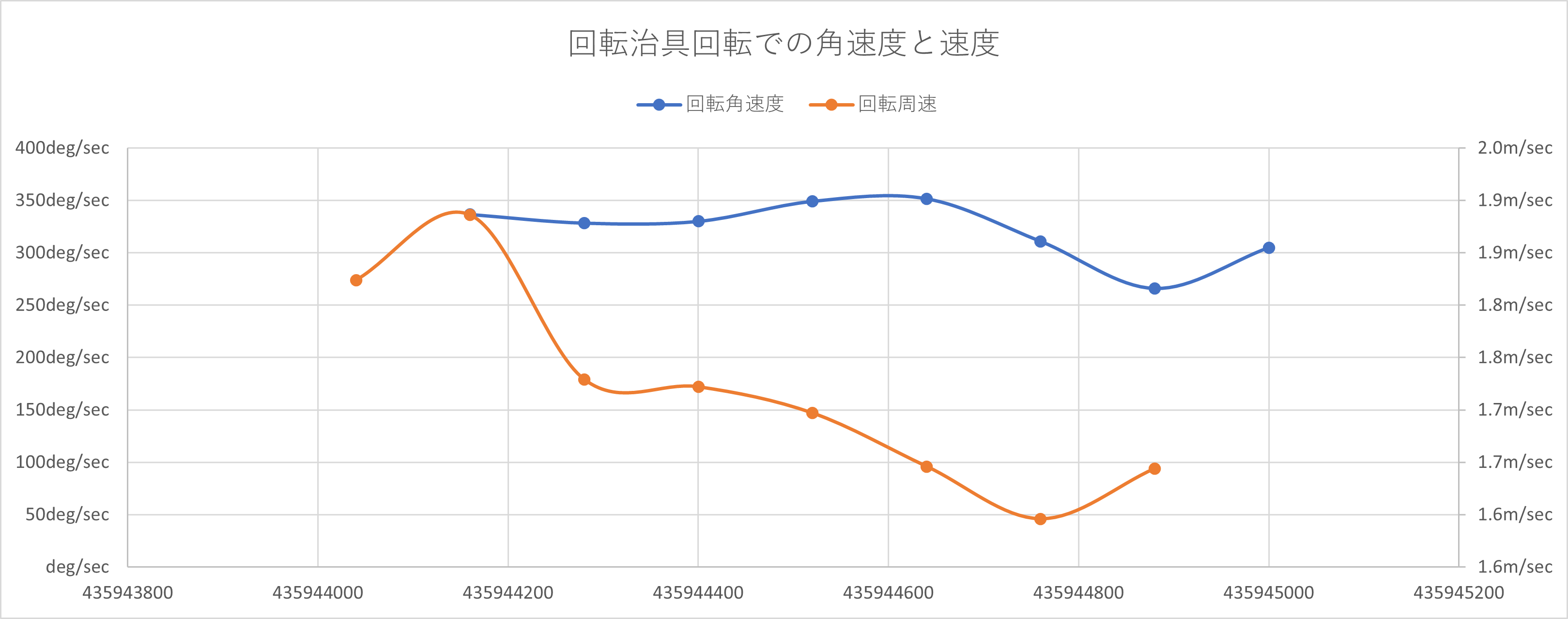
回転治具での角速度は、300-350deg/secと回転周速1.6-1.9m/secです。周速が遅いけど
角速度が速いのが回転治具の特徴です。もう少し勢いよく回したほうが良かったかもしれません。
②SWING測定
手にバーをもって、180度振り回します。1回分のデータをまとめました。
誤差平均値 0.01度 標準偏差1.98度 2σ3.96度 3σ5.94度
回転治具よりは、若干良い精度になってます。仕様以内でおさまってます。
●感想
①RTKのHeading角と120msecに一回補正してみたのですが、初期補正だけでやったほうが誤差小さくなりました。しかし、RTKのHeading角のスタートとエンドで、補間計算を工夫すれば、100Hzのデータ群でばらつきミニマムで処理で、補間して精度を向上させる検討をする。
②周速をもっと高くしないと、スキーの速度にならないので、自動車のダッシュボードに乗せて計測してみる
③データ処理がEXCELで手間どっているので、C#で専用プログラムを作ってみたい。
●以後
12月なので、STA24システム作りしないと1月中旬のよませスキー場に間に合わないので、計測よりも防水ケース作りとパッケージングを優先させます。