揺動治具で往復運動を2水準(60度、30度)を測定してデータを観察しました。
世のなかには、補間とかカーブフィッテイングとかいろいろな処理方法があってライブラリーもたくさん
あるのですが、本テーマの場合、既にセンサの性能を最大限引き出しているので、余計な統計処理をする必要はないことに気づきました。
●GyroデータがHeadingデータと合ってない
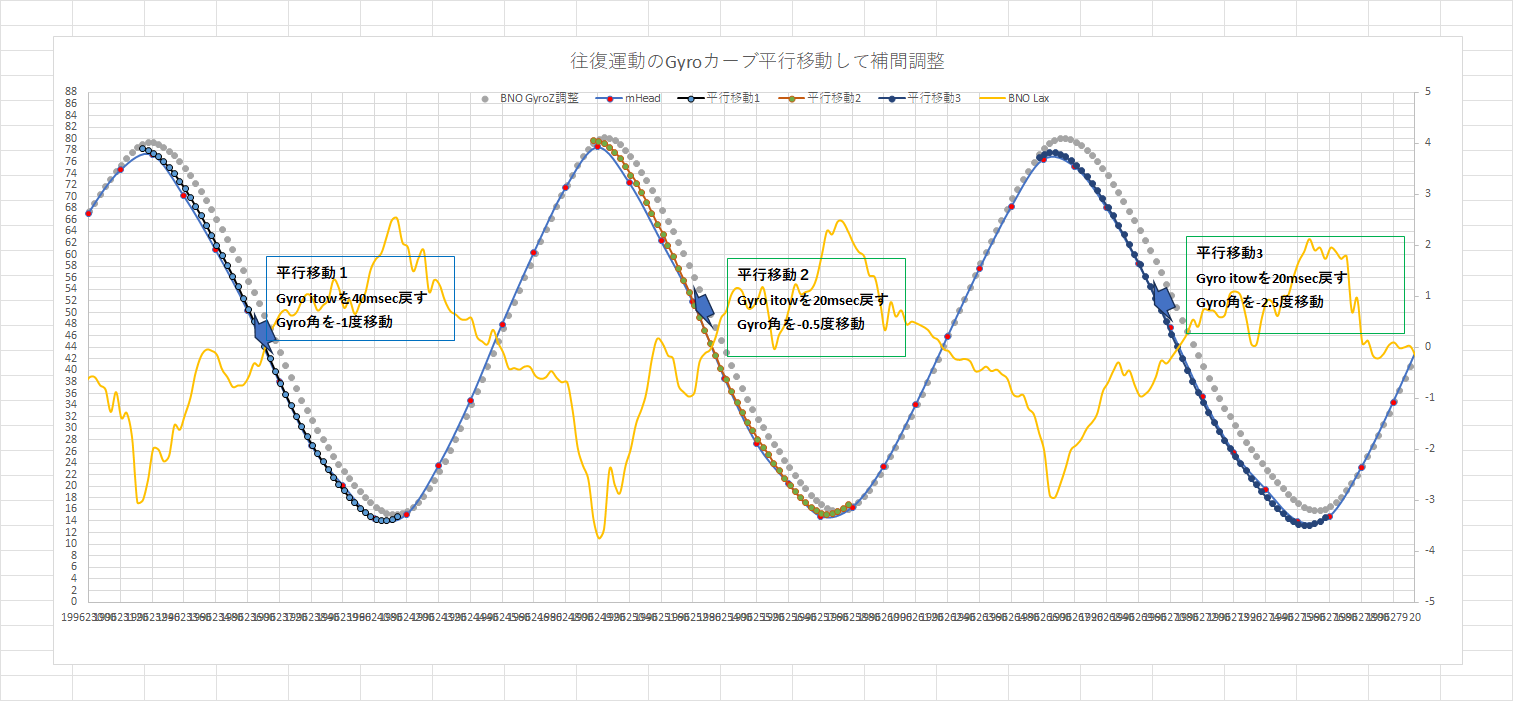
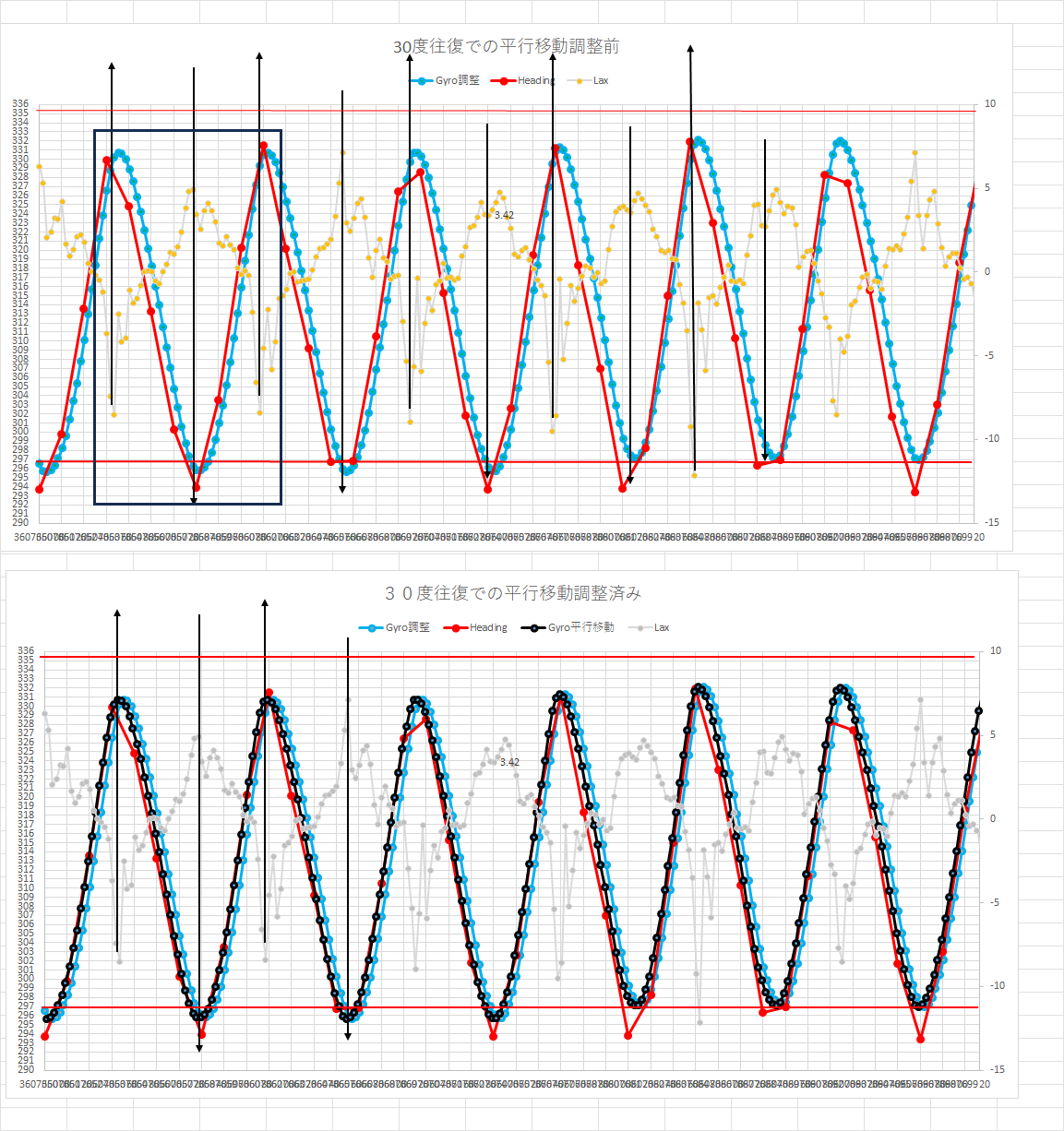
下グラフをみるとGyroのグラフきれいな形状しているのですが、RTK Headingと位相先にいっているのと、往復回数がふえてくるとドリフトが大きくなってくる点が目立ちます。
Gyroのグラフを平行移動して、Headingの点群の上に重ねればそれなりになりそうなので
Excelで手計算で平行移動してみました。
①60度往復のグラフの平行移動
灰色の元のGyro角の曲線を時間軸を戻して、ドリフト分わずかに数度調整しただけですが
Heading点群の上に乗ることが判りました。
移動したのは、ずれている範囲だけです。
②30度往復のグラフの平行移動
上記60度はゆっくりとして速度なので、Heading角とGyroのサンプリング差が顕著にでてないのですが。30度のクイックな往復運動だとHeadingデータはピークを完全に外してしまってます。これは、補間しないと使えないデータになってしまう条件ですので、GYROデータを平行移動しました。
●手動作業をプログラム化する
上記の作業手順をアルゴリズムにして、C#のプログラムにしてみます。
誤差は、最小二乗法の原理で残差の二乗の合計が最小になる条件を総当たりループで回して探します。
RTKHeading角のデータ範囲が1-2秒分20個、Gyroデータ100個程度で、ステップが1度、20msecと粗くていいので。、総当たりで回してもそんなに時間は食わないと思います。
●以後
プログラム作りながら、いろいろな運動でこの補間調整方法が使えるかを検証していきます。