

RTK22は、従来の精度分解能を一桁あげて0.1mm単位で、統計処理をすることで、精度を確定させる測定をしてます。測定データの信頼性範囲が判るので、きわどい測定もトライしてみました。
●スキー板のたわみの測定のアイデア
2022年度は、スキー板のたわみを測定するためにひずみゲージを取りつける準備をしてきたのですが、Movingbaseを使っていればmmオーダーの相対位置が測定できる点を活用したアイデアがでました。
MovingBaseがmmオーダーで計測できる解説はこちら
「スキー板のたわみをアンテナ間のLengthで測定できないか?」
これができれば、ひずみゲージシステムをスキーに搭載する難工事を無くせるので、開発工数が半減します。
ですので、多少手間をかけてMovingBaseでたわみを測定できるか治具を作って基礎実験しました。
●測定方法と治具
■場所:精密測定なので家のベランダでは無理なので河川敷に行って、Fix時間30秒以内の仰角範囲が広い場所で行います。基準局はできるだけ近いところをつかいます。今回は、BIZSTATION様の非公開基準局をお借りしました。2km程度しか離れてません。
■MovingBase Ardusimple社のBaseとRoverの設定ファイルをSimpleRTK2B基板2枚に書きこんであります。
SimpleRTK2B liteを使ってないので、Baseから各種メッセージを得られるので、高精度システム化できてます。
両方のF9PチップからNAV-PVTとNAV-RELPOSNEDを読み込んで高精度値(0.1mm単位)に変換して
その場でM5StickCで液晶モニターするのと、ログマイコンで全関係データをバイナリーとCSVデータをSDカードにログしてあります。IMUのデータも同時にCSVデータにいれてあります。
■治具:棒切れに68cm間隔でアンテナを設置して、Roverのアンテナを薄い穴あきアルミ複合材上に固定してたわみ易い構造にしてあります。
■アンテナは、棒状のヘリカルを使ってあります。パッチアンテナのほうがマルチパスに強いのですが、部材の傾きを変位に変えるにはアンテナ筒の長さ分変位が大きくとれるのでヘリカルにしました。測定方法が確立できたらパッチとヘリカルの差を実験してみます。


M5StickC内蔵のIMUを活用して、カルマンフィルタで角度表示してます。
静的な角度なら、加速度のATANのほうが精度いいですが、動きが入った場合は、カルマンフィルタのほうが
破綻しないでなめらかに角度変化に追従してくれます。ジャイロデータ補正があるからです。
TKJ Electronicsさんのカルマンフィルタライブリーを使ってます。サンプルプログラムをコピペでできます。
https://www.arduinolibraries.info/libraries/kalman-filter-library
このM5StickCは、IMU表示をしながら測定データをモニターへ無線送信する役目もしてます。


たわませるときは、腕につけたM5StickCnoモニターをみながらやります。ESP-NOWで無線受信してるので便利です。

●RTKシステム
STA22のシステムに対して、RoverのF9Hの代わりにRoverもF9Pにして、Roverの絶対位置も計測できるように
変更した。コストダウンのためにF9Hを採用したが、スキーのたわみが測定可能となれば
F9P2個使いにして、F9Hは使わない選択肢もありです。
システムの仕様は、バグとりが終わったところで、まとめてご紹介します。
高精度、統計計算付きなので、プログラムに大変手間取ってます。ログデータ項目が多いのでTeensy4.1でないととても処理速度が間に合わないので、Teensyを選んで正解でした。
●測定結果
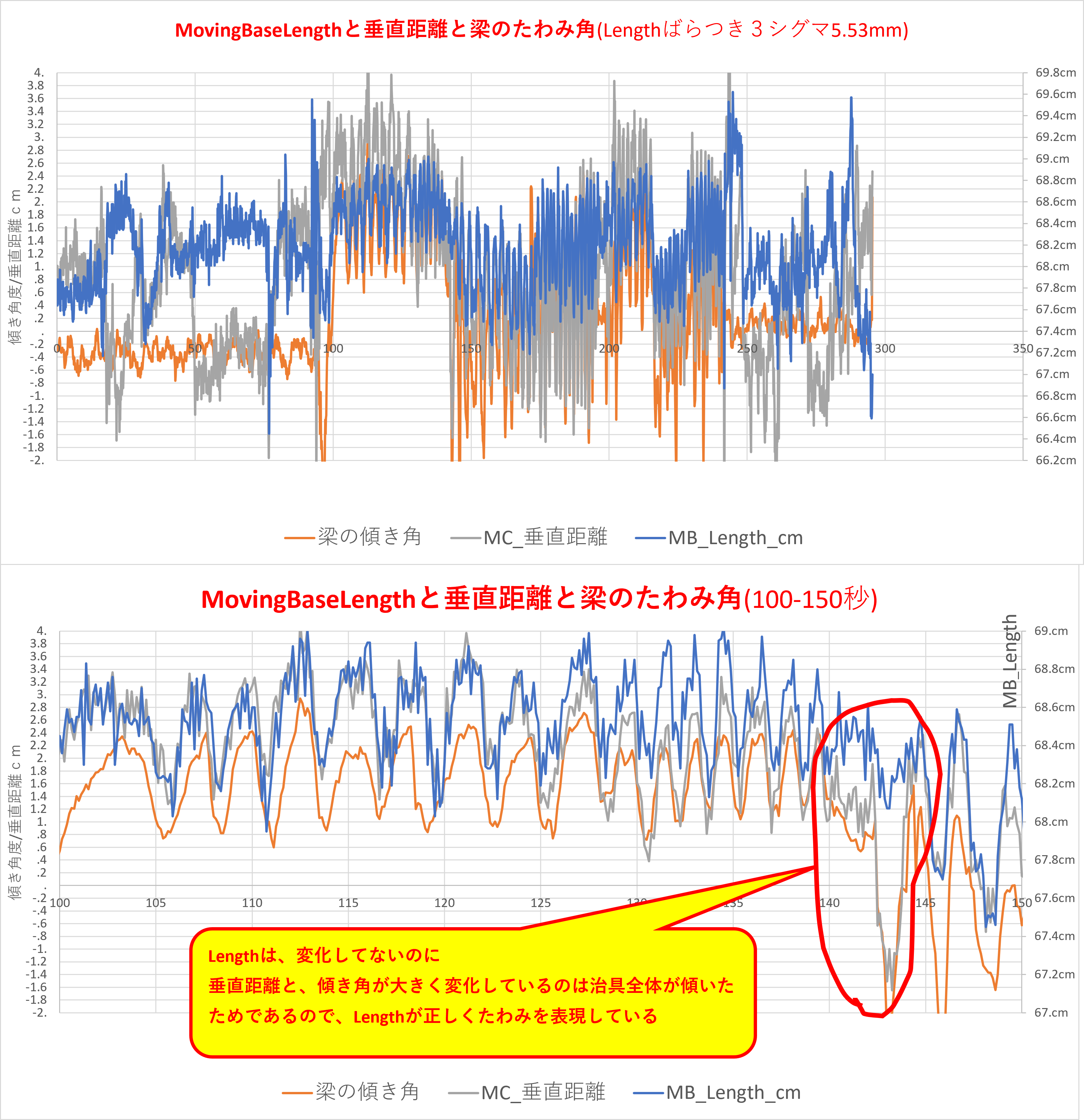
1)Lengthの無負荷時の3シグマばらつきが5.53mmあるので6mm以上の変化があれば
Lengthの変化として認識してよい。
2)Lengthと垂直距離Dと傾き角も、たわみに追従する傾向があるが、相関がとれるかは次回実験。
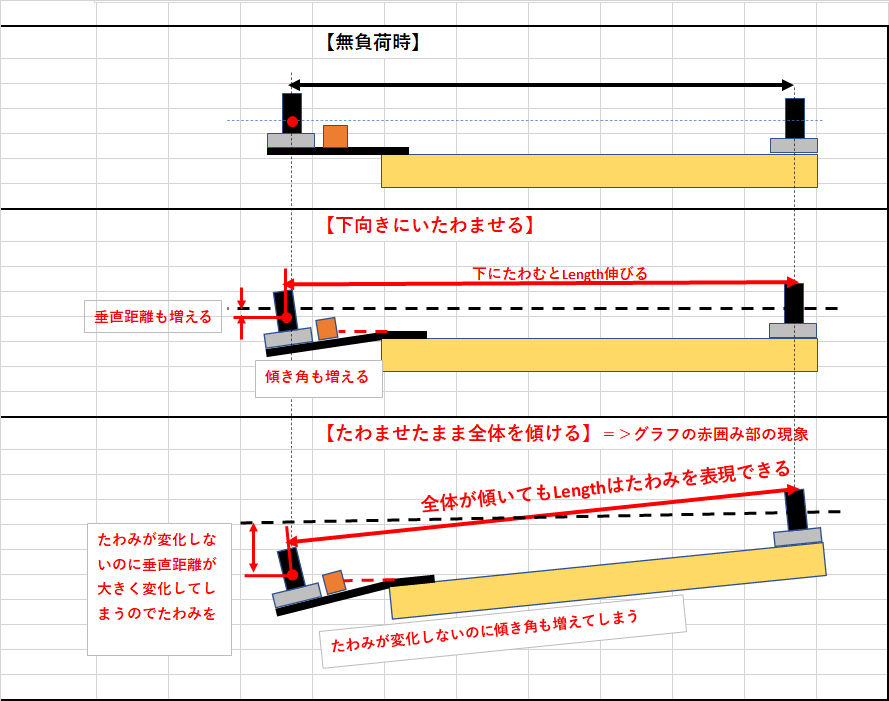
3)全体が傾いた場合、Lengthは変化がないが、垂直距離と傾き角は大きく変化してしまうのでLengthがたわみの
表現に向いてる。
●考察
スキーのように、全体が運動している場合たわみを代表できるのは、Lengthである。
IMUの傾きとか、垂直距離は、地球座標で計測しているのでたわみを直接表現できないと理解しました。
下図で説明
●以後
基礎的な実験とスキー板でたわみを測定します。夏から秋にかけてmovingBase Lengthでスキー板たわみが測定可能かサマースキー場で実証実験を進めていく。
IMUも、RTKの周波数の遅さをカバーできるか、歩行実験しながら検討をすすめる。





