ここ2年ほど、MovingBaseモードでのBaseーRover間の無線化を試行錯誤してきましたが、現在の電子工作系の無線方式(Xbee,BlueTooth,WiFi-UDP,その他WiFI系)では、MovingBase高速モードには対応できないことが分りました。5G以降、現在の無線技術の穴を埋めてくれる方式がたくさん誕生してくるはずなので、それまでは、無線化の検討はしないことにしました。
——–※2023年6月 追記——————————————————————–
低遅延の無線方式5G以外でも各社工夫して商品化されていることを発見しました。
SILEX社のAMC LLW技術だと1KBを1msecで送信できるので、これを使えば
MovingBaseモード 460800bps出力を無線でRoverへ通信できそうです。
https://www.silex.jp/technology/low_latency.html
しかし、特殊な技術なので、アマチュアがいじれるレベルのものではないので、電子工作では
無理かなと思います。
————————————————————————————–
原因1=>WiFiを初めとする現在の無線方式は、送信データをパケット単位で無線送信します。
F9Pから送信されるRTCM3全部で20-30msecかかりますが、それを待って、送信するので、受信するRoverは、20msec以上待ち時間が発生してしまう点です。有線のシリアルだとF9Pから460800bpsで出た信号をダイレクトにRoverに送信しているので、Roverは、待ち時間なしで、F9PがRTCM3を出力し終わった瞬間に受信終了してます。無線だと、F9Pが出力し終わってからパケットで送信するので、20msec以上遅延してRoverが受信するので、遅延が発生して、タイミングが厳しい条件では、RTKがコケてしまう現象が発生します。
原因2=>一般的なチップなら、無線化でこんなに苦労しないはずですが、F9Pという、RTK演算専用チップだと
処理能力に余裕がないため、タイミングがうるさくて、10msecレベルで外部からの入力タイミングが遅れると
周期がまにあわなくなってこけてしまいます。こけ方がアナログで、たまたまいい電波条件ならこけませんが
電波条件が厳しくなって、計算量が増えるとこけてしまうリスクが多くなります。ですので、無線システムを作っても、良いかどうかが評価が難しくなります。統計的なチップなので評価も統計的に、膨大な実験評価をおこなわないと良しあしがわからないという大変なチップです。
前回その4が8月22日でしたので、3か月過ぎてからその5の投稿となります。
無線化でUDPがNGとなって、その間、2022年に向けて対策を模索してました。
ターゲット分野は、スキーと歩行です。
F9Pへの送受信での無線化は、データが途切れたりとデータ落ちがあって長時間安定に通信することができてません。出来ているのは、WiFi NTRIP Clientだけです。自分で作成した無線受信プログラムは全部NGでした。
●RTK21の残課題
⓪NTRIPレシーバーの無線2分配ができてない
WiFiで、NTRIP接続してレシーバーができていれば分配する必要はないのですが、一応あげておきます。
NTRIPサーバーから受信されるRTCM3データが1kByte前後と大きなパケットです。
・ESP-NOWでは4回分で細切れになってしまってNG,
・BlueToothで送ったら、ランダムになってしまって、受信プログラムうまく動かなかったのでNG
=>最終的にWiFiを使って、HTTP ClientでNTRIPレシーバーを2個にすることで分配無しで使ってます。
①MovingBaseモードでのBase-Rover間の高速無線方式無い
BaseからRoverへ1msec以内の遅延でRTCM3を無線送信できる手段がなかなか無い。
WiFi系は、パケットがたまるまで送信できないので、Baseから460800bpsで1KByteが
出力される時間が約2msecなので、待ち時間となります。細切れにして500μsec毎に
送信にかかる命令時間で1msec以上は食ってしまいます。
②F9P MovingBaseサンプリング遅い8Hzが最高速しかでない
A,スキーの場合
ターンの切り替え点をNutralPointと呼んでますが、この位置がターンの基準となりますが
時速36kmhだと、125msec(8Hz周期)で125cmですので、NutralPointの誤差1.25mです。
スキー板が1.6mで誤差が1.25mあると板の80%が誤差ですので大きすぎます。
これが、競技速度となると60-100kmhとなるので、誤差が数mでると旗門の通過を
逃してしまう可能性があるので、8Hzでは、低速のスキーしか測定できません。
B、歩行の場合
8Hz125msecだと接地した瞬間を取り逃す可能性があります。
速足だと時速6kmhで、1歩250msecですが、たった2点しかサンプリングできません。
どこで接地したかもわからないので、歩行もゆっくりした速度でしか測定できません。
●RTK22に向けた対策案<ダメもと>
=>無線化トライして3年目ですが、出来ない可能性大なので無線化しなくても大丈夫なようなシステムを組んでいきます。ダメ押しで下記案がありますが、暇ができたら確認してみますが、期待薄いです。
①MovingBaseモードでのBase-Rover間の高速無線方式無い=>トランシーバー方式調査
WiFiのパケット方式でなく、BlueToothのSPP方式のような方式でないと遅延を最小化できない。
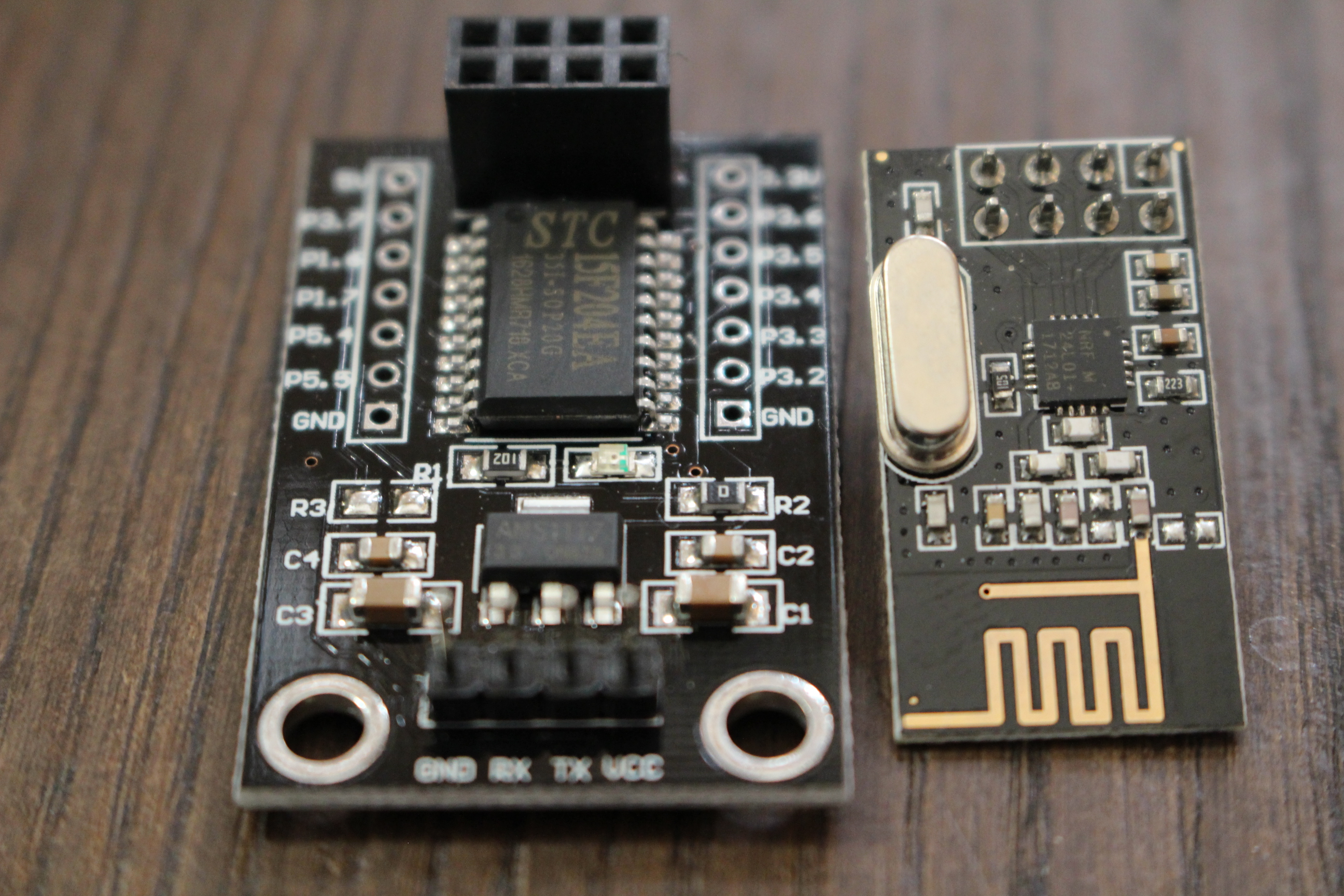
2.4GHzのトランシーバーは、2014年くらいにArduinoで流行ったことありました。
Nordicセミコンダクタ社が格安のトランシーバーチップnRF24シリーズがありました。
https://www.nordicsemi.com/Products/nRF24-series
廃版になっているので、ここにアーカイブありました https://infocenter.nordicsemi.com/index.jsp
nRF24Lの仕様書ZIPアップしておきます。nRF24L01P_PS_v1.0
無線速度が2Mbps 1Mbps 250kbpsとあるので、うまくいけば1Mbpsが実現できるかもしれません。
nRF24L01がArduinoでよく使われているようで、解説記事がたくさんありました。
1:ケイツー電子工業様 トランシーバー基板を開発販売されています。nrF24Eも扱っていて製品ありました。
2:なんでも独り言様 Arduono接続を判り易く解説されてます。感謝 nRF24L01モジュールで無線通信
3:ぶらり@走り書き様 感謝 【電子工作】無線モジュールnRF24L01を使いArduino間で無線通信をやってみる!
4: answerexpress様 感謝 NRF24L01 +を使用した2チャンネルリモートコントロールの作成
5: 気分はメーカーズ様感謝 NRF24 送受信モジュールを使ってARDUINO で簡単な通信をしてみた
6:ArduinoやESP、Rasberryで遊ぼう 様 感謝
nRF24L01を搭載した一台の受信機で、複数台のnRF24L01からの信号を受信処理する実験。
7:Tokoro’sTech様 詳細な解説感謝 nRF24L01無線モジュールを使ってみる – 電子工作 †
※私も5年前に仕入れてそのままになっていた在庫が数個ありました。
WiFIやBluetoothのような規格が決まっている訳ではないので、無線通信設定と距離次第で
通信速度とデータ落ちが決まるみたいです。これから基礎実験しながら使えるかどうかやっていきます。
②F9P MovingBaseサンプリング遅い8Hzが最高速しかでない=>Septentrio Mosaicチップ検討
A,STA(スキーターンアナライザ)向けのボード
Ardusimple社からSimpleRTK3B基板が発表されたので、使えるか検討していきます。
【RTK21】Ardusimple社からSeptentrio Mosaicチップ搭載ボード発表<高精度高速測位>
ネックとして
1:F9PのHeadingキットの2倍の価格帯なので、スキーシステムで20万円を超える価格です。
こうなるとDIY趣味の範疇ではなくビジネス、プロ用になるので、当サイトしても、プロをターゲットに
開発することになりますので、一般人向けの記事としては、あまり役立たないので、ビジネスとして開発する
かもしれませんので、本ブログでは公開しないかもしれません。
2:サンプリング50Hzのモードだと、基準局からRTK無しでMovingBase単独モードとなるので、緯度経度が
わからなくなるので、別途RTKボードを用意して緯度経度の計測をする必要があります。緯度経度を
測定しながらMovingBaseを行うと20Hz程度まで遅くなります。のでF9Pの2-3倍の性能とうことです。
3:1Base2Roverができない可能性がある。1ボードにBaseとRoverが乗っているので、Base出力だけを
とりだして、もう1枚のボードへ高速送信できる仕様かを調査しないといけません。
B、歩行
歩行の場合は、接地の瞬間を誤差なく捉えないといけないので、50Hzサンプリングでも
正確ではありません。IMUを使って接地の瞬間をとらえてそれからIMUとRTKを使って
足の3次元の軌跡を測定する必要があります。ですので、上記MOSAICチップでなく
IMUを併用した方法が良いと考えてます。
【RTK21】歩行計測の準備_IMUで接地検出<RTKを補間する>
●日程
現在、信州MAKERS実験サイトを長野市の実家に移動するための作業をしていて、開発活動を抑制してます。
2022年2月末までに引っ越しが終わってから本格的な開発を始めます。
それまでは、調査と基礎実験だけになりますので、今スキーシーズンは、春スキーからの測定になります。
RTK開発では、無線化とALES接続をやめて、自前の移動基準局作りもやりたいと思ってます。