信州MAKERSでのRTKの用途の多くは、IMUの代用として多CHRTKを利用してます。
IMUではなかなか測定できないシーン(スキー、歩行など人間の運動)では有効なことが判りつつあります。MovingBase技術をより活用するには、ベース1個から多CHのRoverに同じRTCM7データを送って、BASEとの相対位置で測定したほうが、測定の安定性と精度が向上することが見込まれます。
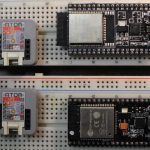
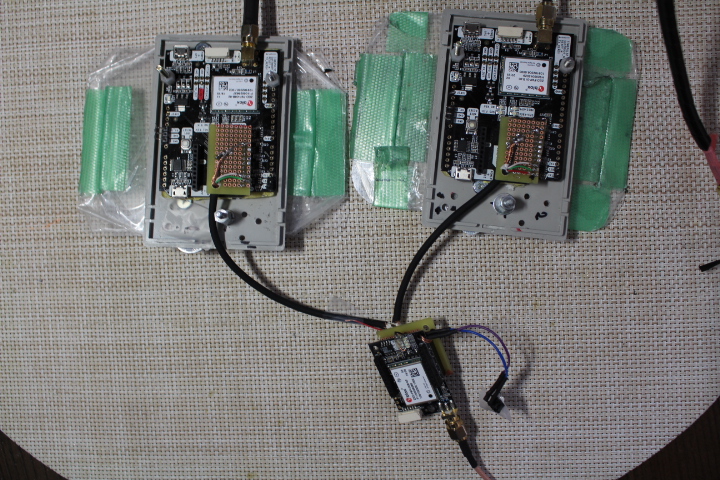
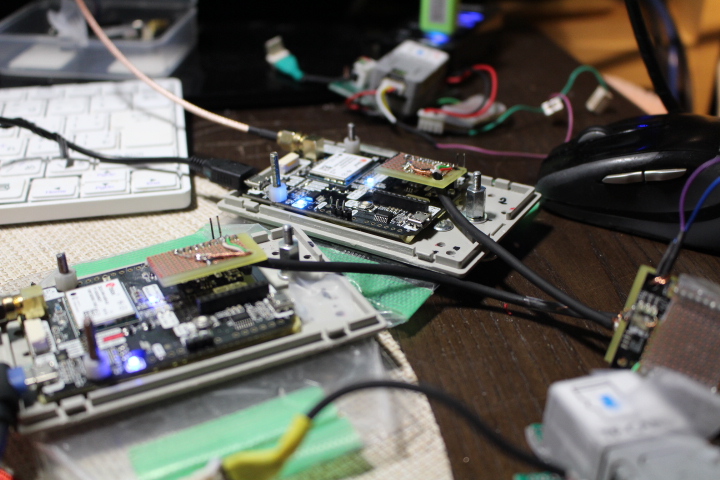
●1BASEー2ROVER配線してみた。
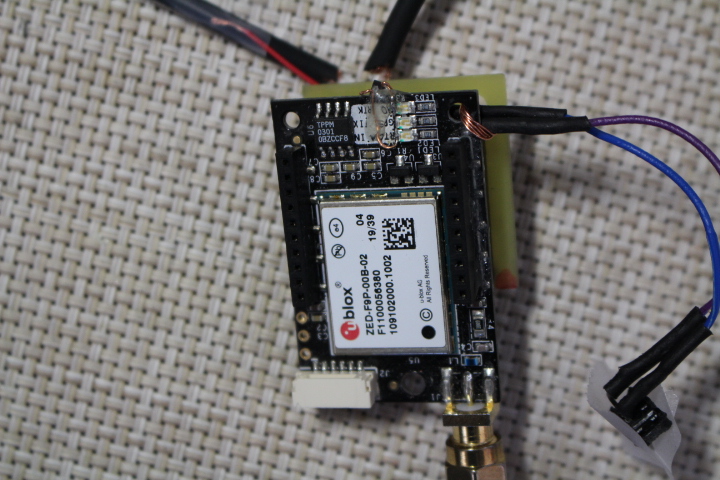
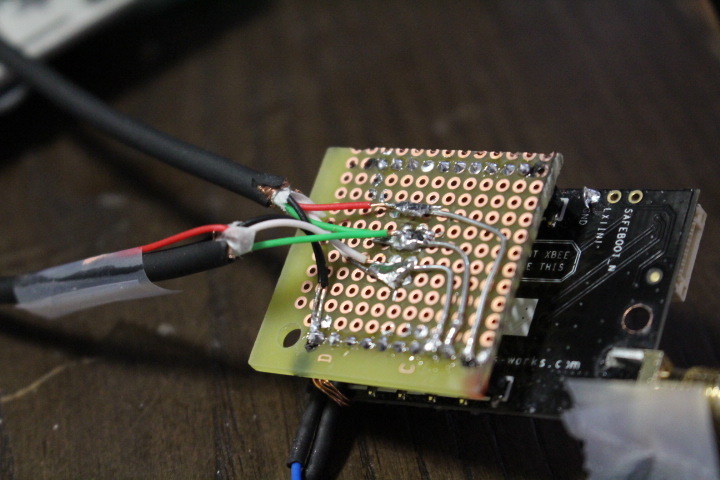
現在、SimpleRTK2B上に載っているBase役のSimpleRTK2B liteを切り離して、ボトムのUART1からのRTCMデータ出力を2分配させる配線をしました。460800bpsと高速なシリアル通信なので、ノイズ、電圧降下をしないようなケーブルが必要です。シールド付きのロボットケーブルを採用してみました。ロボットケーブ細いので、大電流は流せませんので、SimpleRTK2B lite上にWiFi NTRIP MASTERを搭載したら電圧降下で動作しなくなりました。電源は、BASE専用にしたほうがよさそうです。今回は、NTRIPレシーバーからのRTKで、やったので、SimpleRTK2B liteの電流が上がらないので無事動作確認できました。
シールドは片側接地式が一番ノイズが少ないのが相場ですのでSimpleRTK2B側のGNDをシールドに接続して、SimpleRTK2B lite側のシールドは浮かせてます。
●初期動作
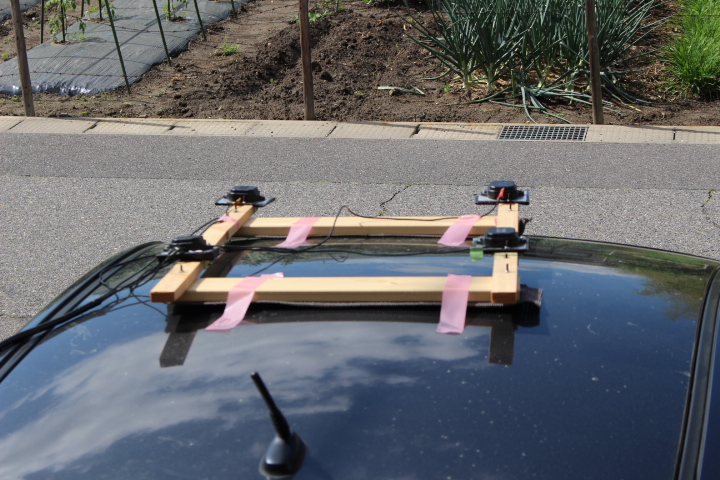
家の前の車の屋根にアンテナ4個載せてあります。
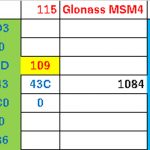
Rover役のSimpleRTK2B2個をUcenter2個立ち上げて測定した結果
| 単位:cm | Rover1(COM50) | Rover2(COM43) |
| N | 50.88cm | -1.46cm |
| E | -1.33cm | -49.41cm |
| D | -9.46cm | 0.52cm |
| Length | 51.77cm | 49.43cm |
| Heading | 358.49868deg | 268.30252deg |
実際に寸法測定しても、アンテナ受信の電波の中心は判りませんので、±1-2cm程度精度でしか寸法測定できませんので、巻き尺で適当に測ってます。
水平寸法は±1cm以内はでてるようですが、垂直寸法Dは9.46cmもなくて
だいたい5-6cmなので、大きく精度がずれていることが判ります。
GPSでは垂直精度はでないのですが、これは大きすぎるので視界の影響かもしれません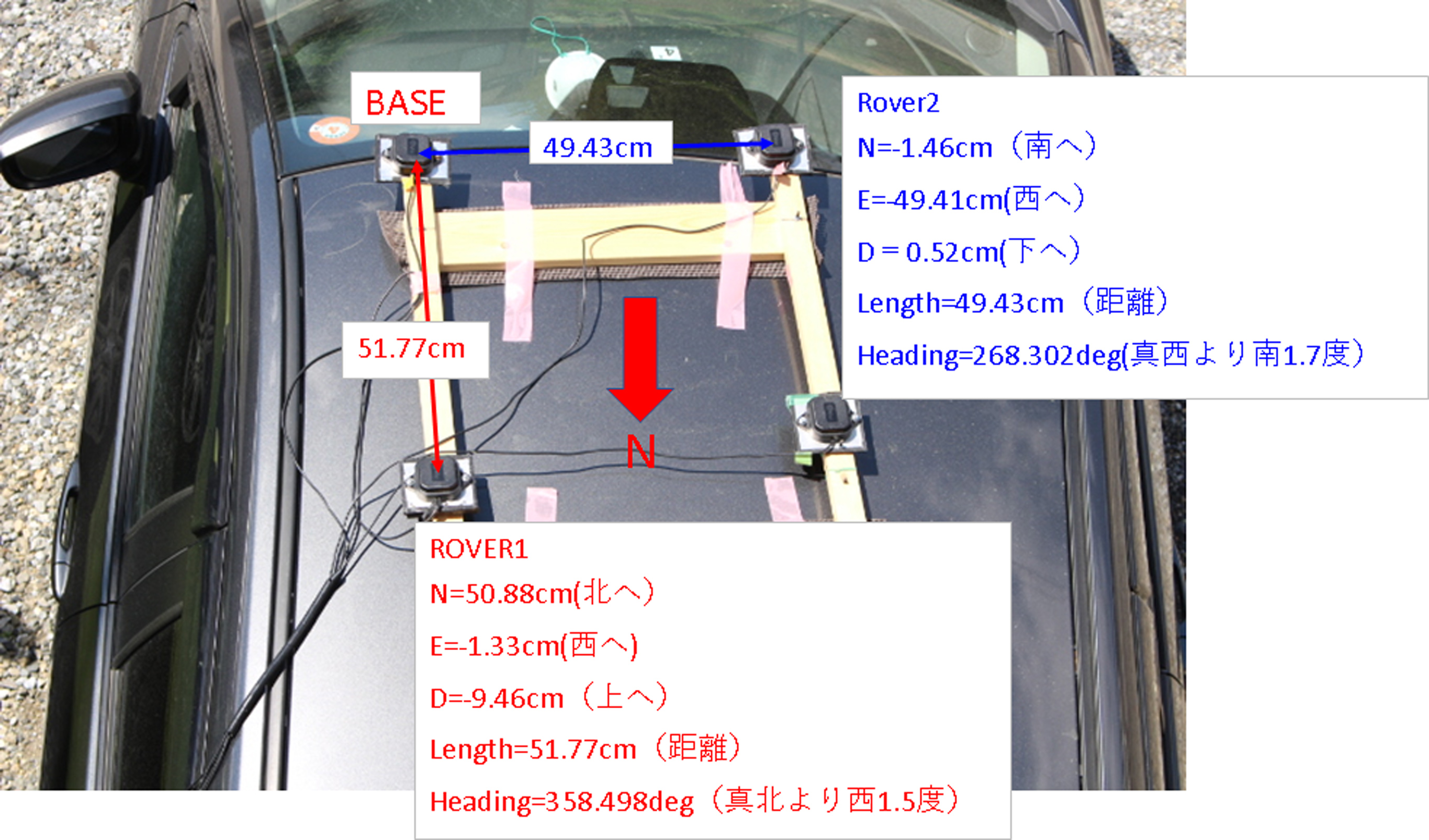
●以後
歩行で便利に使えますので、腰にBASEアンテナをつけて左右足の甲にアンテナをつけると足と腰の位置が精度よく測定できるので便利だと思います。
スキーも1Base3Roverにしたほうが精度があがりますが、
配線の引き回しが大変なので、460800bpsの無線ができるか検討してからになります。