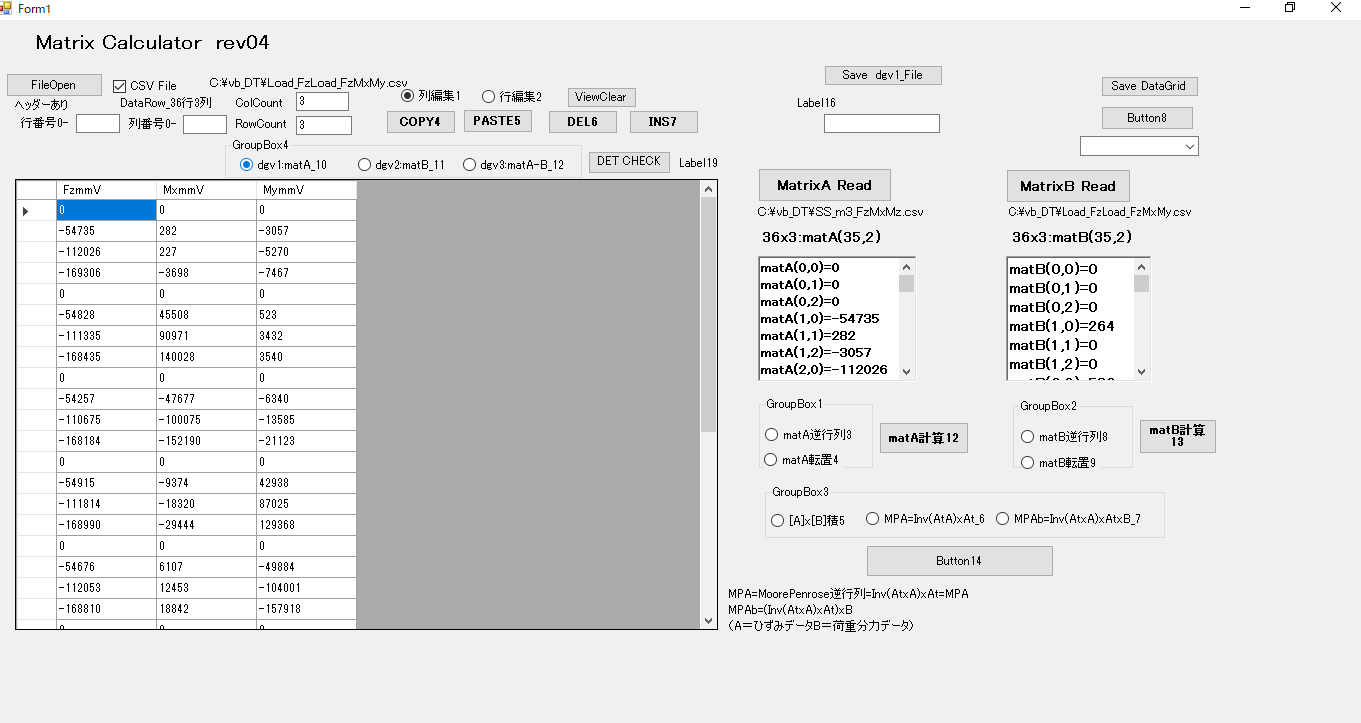
Matrix_Calculator_rev04完成しました。。
■やり方
ひずみデータと荷重データを
行列ファイルにして、渡せば、瞬時に干渉補正結果がでます。

■干渉補正に使った、逆行列について役立った解説資料
①干渉補正の原理は、MoorePenroseの逆行列という行列の法則から導かれるのですが、一般化逆行列とも呼ばれてます。詳細な解説記事は、たくさんあるのですが、まとまっているのが早稲田大学 杉本憲治郎先生のスライドです。https://www.slideshare.net/wosugi/ss-79624897
②東大の梶本先生(現電通大)の計測における一般逆行列についての解説
http://kaji-lab.jp/kajimoto/leastsquare_main.htm
「最小二乗法とフィッティングとモデルパラメータ推定について」
※いずれの先生も、大事なのは元の測定が正確に行われることに尽きるとのご意見ですが、センサ作りの精度改善が最も重要だと理解いたしました。
そのため、SCPシステムでリアルタイムにセンサの異常と特徴を検出して
対策を素早くできることは有効だと思います。
②私の備忘録記事
■実測データでプログラムを回しみると
例題で解がある係数で行列を作る分には、どのライブラリーもExcelと等しくなりますが。実測データを行列として入れるとライブラリーによって値が違ってくるので,Excelとの値も違ってきます。
原因は、倍精度計算の精度です。何しろ逆行列計算は、1個決めるのに何十回も割り算、掛け算と繰り返して、整数がE+10 E-10と巨大な桁数の数に化けてしまいますので、小数点15桁での数字の違いが、割り算すると全く異なる数値に化けてしまいます。
PC上では、倍精度は、小数点15桁までは保証されているそうですが、
それでも、ライブラリーによって違ってくるし、Excelの逆行列とも違ってきます。
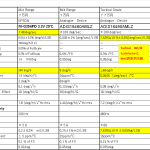
■フォースプレートで3軸干渉補正Excel計算結果とrev04計算の比較
前回の記事は、こちらです。
●ExcelとVBでのMP逆行列計算結果比較
MxのFzmv係数が大きく違ってます。

この係数で、測定データを代入して誤差を計算した結果は

VB計算のほうがMxの値が誤差が大きくなってしまいました。
■干渉補正は必要か?
メーカー製品の多分力ロードセルは、モノ自体が干渉が少なく設計調整されいるため、干渉補正なくても1%以内の精度を確保できてますが、素人自作の多分力センサは、工作精度が稚拙で、軸の傾き、ズレなど多発してます。
それらの誤差をまとめて、カバーするのが干渉補正ですので、素人自作多分力センサには、必須のアイテムだと考えてます。
ちなみに今回の生データでの測定位置別直線回帰と干渉補正後の直線回帰での3分力成分の誤差補正は精度が10倍よくなる等、劇的に改善されてます。

■干渉補正誤差の考察
いろいろ元のひずみ値データを加工して様子を見てみたのですが、
①ノイズ、クロストーク
=>ノイズ、クロストークを消して改善せず
②前後左右の荷重対称性に応じたひずみ傾き
=>傾きを全部合わせたが、元データがゆがんでいるので改善できない
●結果
元データを測定したときに、線形性と対称性が相当の精度レベルで確保されてないと干渉補正しても、ダメなデータは少ししか直せないことが判りました。
■以後
SCPシステムは、上記の結果のように、測定時点で、データの異常を検知して、その場で対策を打つリアルタイム性をもたせることで被測定物の欠点をカバーできるようにしていくことを目標に進めていく。