トータルしたペダリング解析システムの検討を始めてますが、世の中の研究はどうなっているか最近の情報を調べてみました。
GoogleScholarで「ペダリングの力学」2016年以降で検索

●注目した論文
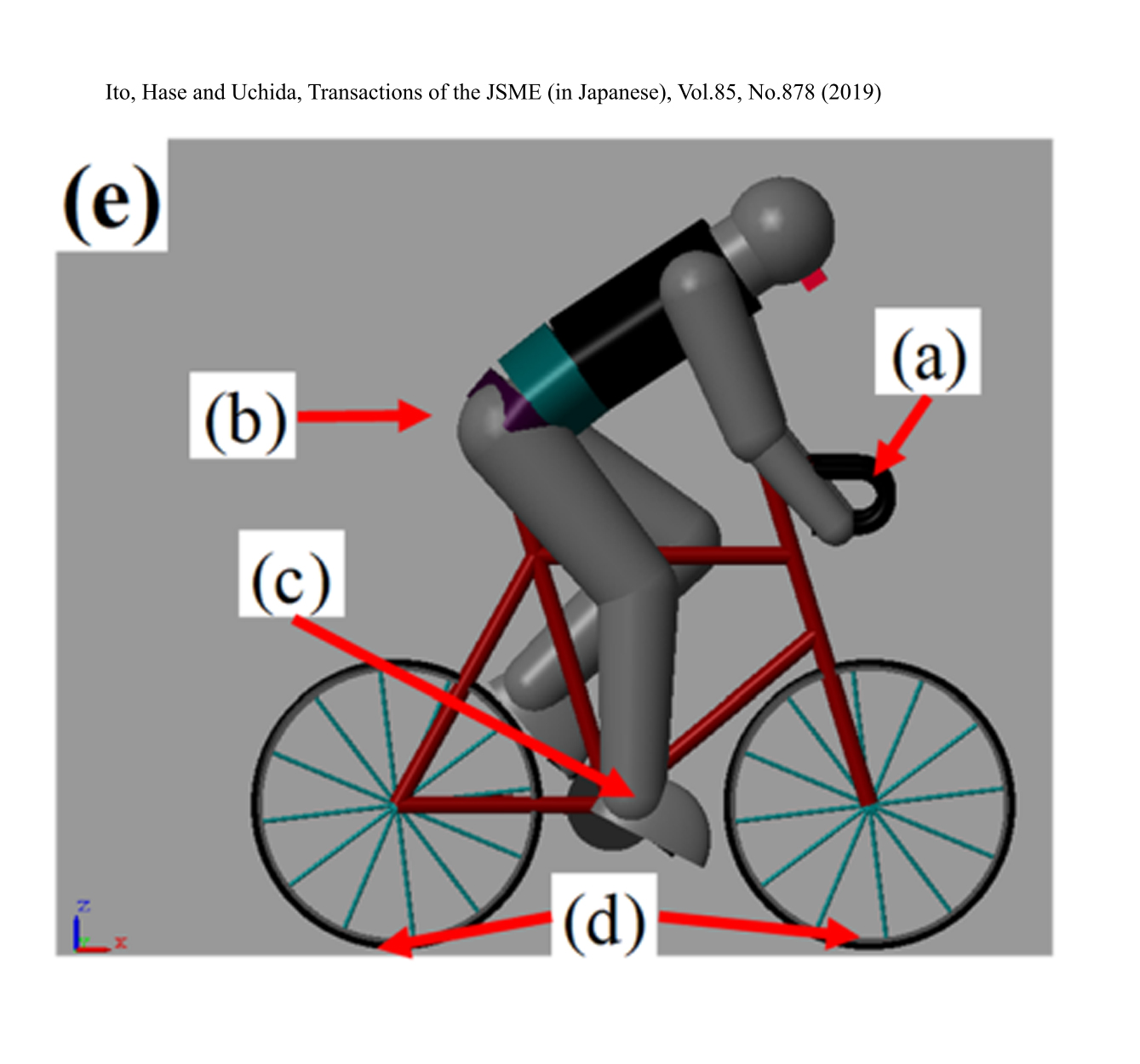
①競技用自転車フレーム剛性がペダリング動作に与える影響のシミュレーション解析
2019年の首都大東京とブリジストンの共同研究です。最新なので、めいっぱいシミュレーションをかけてます。
手法的に、非常に勉強になります。人間の上肢下肢胴体の運動と自転車の走行抵抗(ころがり、空気)などもシミュレーションにいれてます。
そして、実際の検証データとしては、エルゴメーター上での実測データで比較してます。ペダル踏力は3分力ロードセル、関節の動きとクランク回転はLEDでのモーションキャプチャーで関節駆動トルクを算出してます。
タイヤの接地からホイールチェーンまで含まれているのは、実走行状態をシミュレーションしたかったからではないかと思いますが、実走行状態をシミュレートするには、基礎データが不足しているのではないかと感じました。どこかでシミュレーション範囲を区切って、実測と合わせたほうが有意な結果がでるはずですが、今回は、結果的には、高剛性が良いという当たり前な結果しかでてない点が残念です。

このシミュレーションの考え方を学習して、解析システムに生かさせていただこうと思います。研究者に感謝いたします。
②自転車競技のヒルクライムにおけるスマートフォンを用いたペダリング支援システムの検討
情報処理学会論文誌 2017-12-15
同志社大学
本田 雄亮
間 博人
村上 広記
津崎 隆広
三木 光範
ソフトウェア研究からの論文です。気に入ったのは、ヒルクライムレース中に心拍数とケイデンス情報から、過去データと比較して、スマホで、現在のギアを上げるか、ケイデンスを上げるのかを指示する表示がでる点です。

私が、目標にしているパワーマネジメントメーターの概念と同じで、現在のペースをデータベースから、どうあるべきかを判断して、指示するシステムです。私の場合は、いかに疲れずに長距離を安全に走行できるかですが、
同じ概念で開発されている方がいて、うれしいです。研究者に感謝です。
③人力ロボテクスという新分野の研究が進んでます。
人の動力を利用した新たなロボットという概念です。
パワー源は人間で、制御をロボット知能でおこなうことで、従来には
ない働きを得るというパッシブロボテクスの一分野としていくつかの大学の研究者が研究をしてます。その中で人間のペダリングの研究もおこなわれてます。ロボット系の技術からみたペダリングとなります。
東工大 菅原 雄介
人力ロボテクスの提案

③バイオ系で筋肉と骨格に研究
筋肉系の学問からみたペダリングです。
大阪大学 富永健太
●大学の研究が変わってきた
時代がAI,IOT化してきて、自転車関係の研究も方向性が変わってきてます。
解析が簡単になってきた点
企業との共同研究が増えた点
AI,IOTロボット時代の自転車の在り方
●信州MAKERSのアプローチ
信州MAKERSでは、テーマである、TOTALしたモノ作りとコト作り
がモットーですので、各種研究、開発から情報と知見を学んで、役立つ
モノ作りをしていくということです。
分野は個人のDIYで、役立つものを作ることです。
今までの産業は、メーカーが大量生産して、同じ規格品をユーザーに
押し付けて安くしていたのですが、メイカームーブメントでDIYが進んでくるとたった一つのニーズを満たすたった一つの製品が存在できるようになります。特に、人間の体に触れるようなスポーツ関連では、個人個人に合わせた製品が求められますので、DIYメイカームーブメントが発展すればそのニーズを埋めていくはずです。3DPもしかり、個人の電子工作もしかりです。信州MAKERSでは、自転車とスキーと歩行というスポーツでのガジェットをDIYで開発することで、提案をしていきます。